") 基于Aurix TC377的BLDC驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
基于Aurix TC377的BLDC驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
本文圖片摘自“英飛凌與乾勤科技針對(duì)AURIX及BLDC控制的培訓(xùn)”
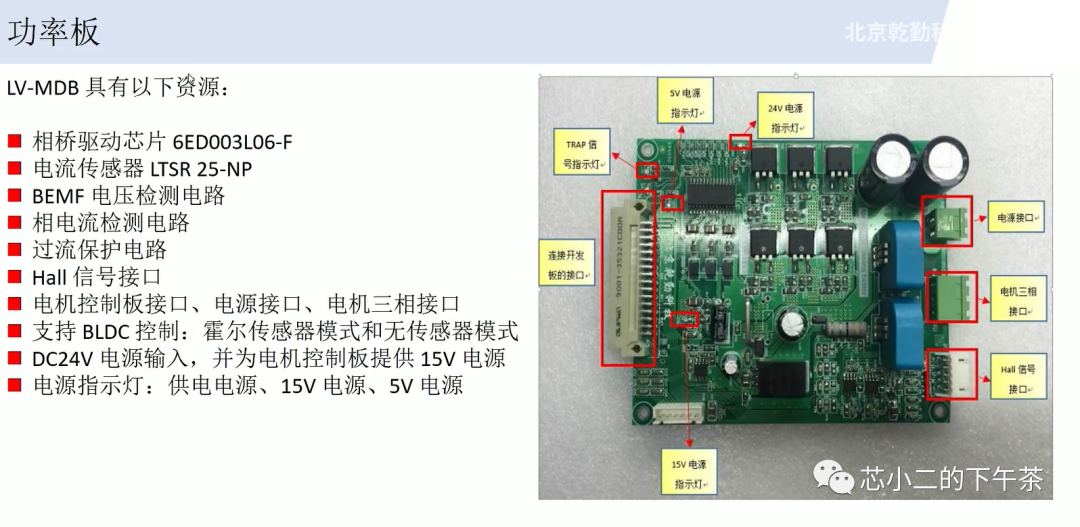
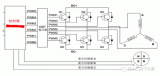
控制系統(tǒng)如下,控制器部分采用AURIX的TC3系列的TC377,采用專門驅(qū)動(dòng)6ED003L06-F2,電流傳感器采用LTSR 25-NP,本文介紹的控制系統(tǒng),位置反饋采用了霍爾傳感器;
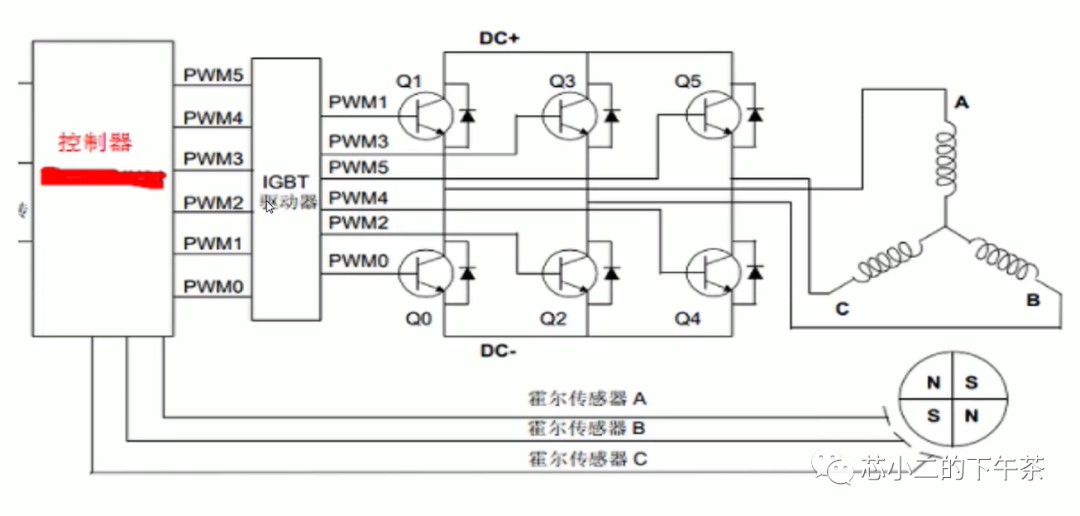
1控制原理概述
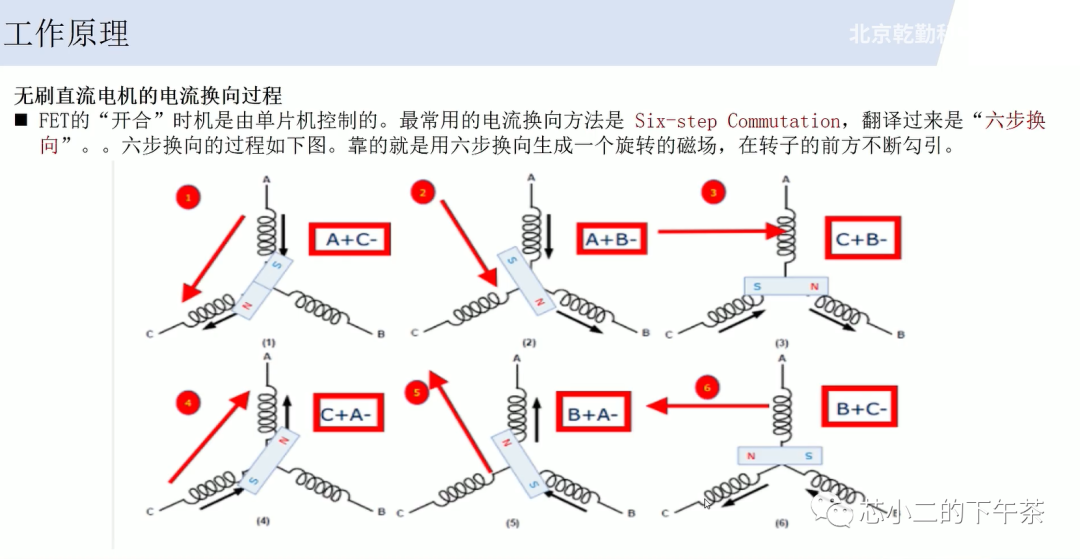
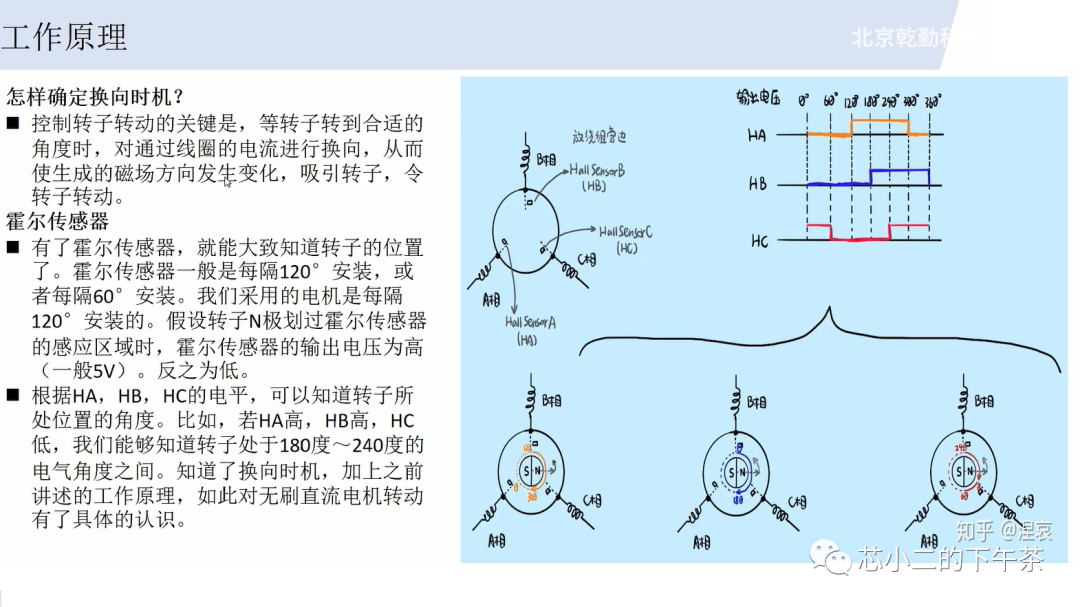
簡單說下控制原理,詳細(xì)的可以查下BLDC的六步換向控制; 通過控制三個(gè)橋臂的開關(guān),進(jìn)而控制BLDC三相繞組流過的電流,進(jìn)而控制電流產(chǎn)生的磁場極性;磁體轉(zhuǎn)子在磁場的作用下進(jìn)行旋轉(zhuǎn); 為了檢測出轉(zhuǎn)子的位置,進(jìn)而制定三個(gè)橋臂開關(guān)管的控制策略,需要采用霍爾傳感器進(jìn)行檢測;
2基于AURIX的控制實(shí)現(xiàn)
如下圖,幾個(gè)主要部分:
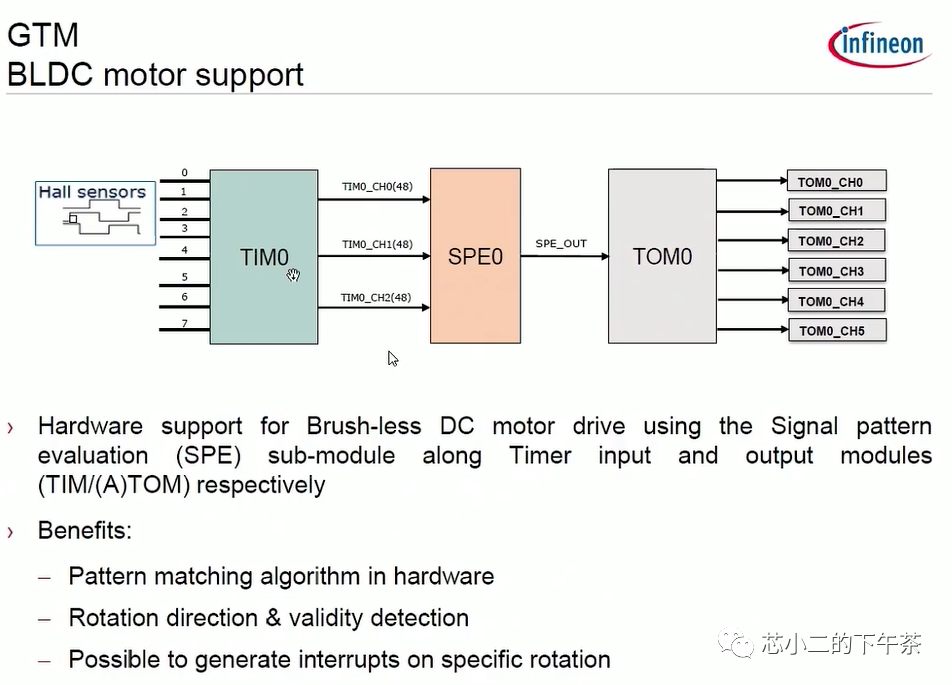
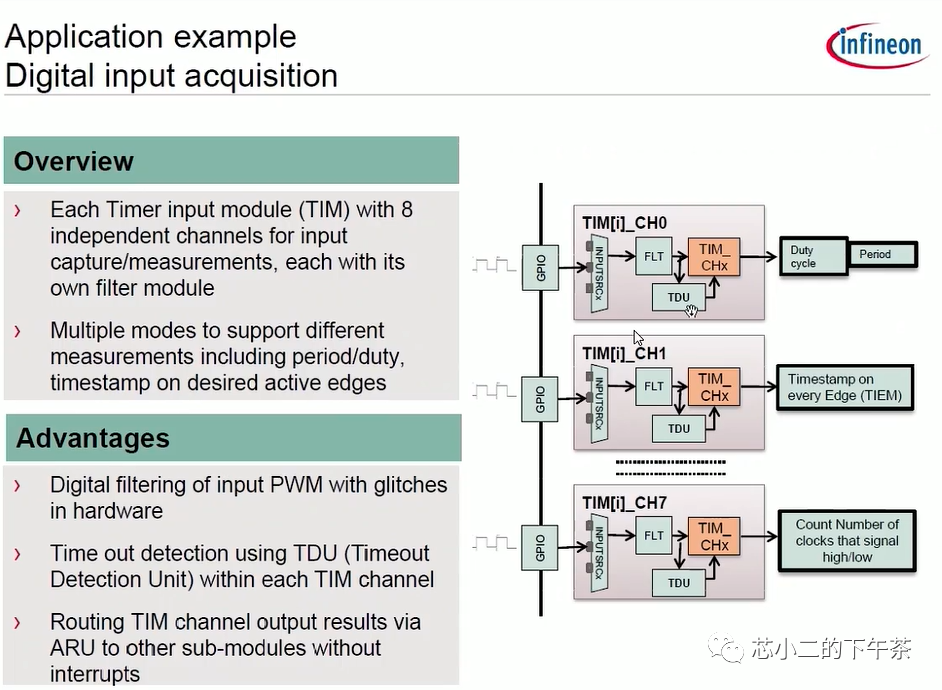
GTM-TIM模塊,負(fù)責(zé)霍爾的輸入檢測及濾波;
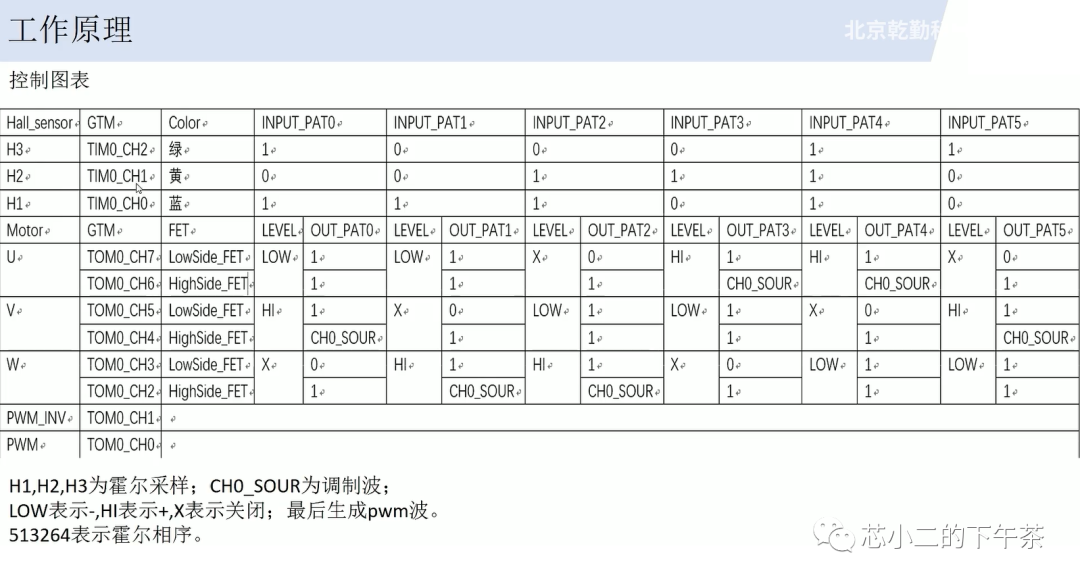
GTM-SPE模塊,負(fù)責(zé)處理霍爾信號(hào)并確認(rèn)下一步橋臂的控制策略;
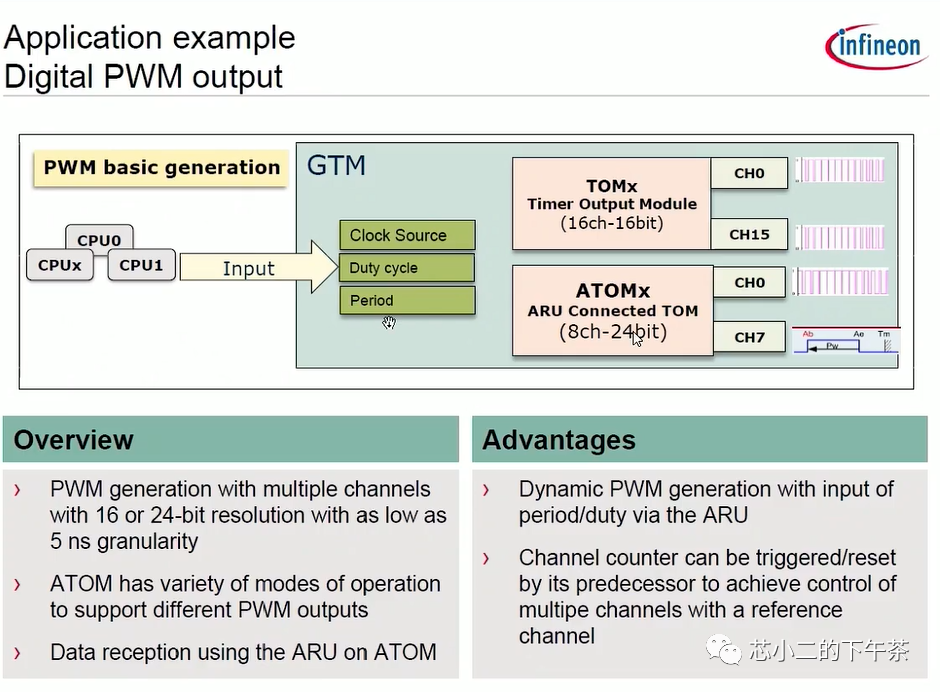
GTM-TOM模塊,負(fù)責(zé)產(chǎn)生PWM;
GTM-DTM模塊,負(fù)責(zé)PWM死區(qū)的產(chǎn)生;
整體的BLDC的控制軟件流程圖如下

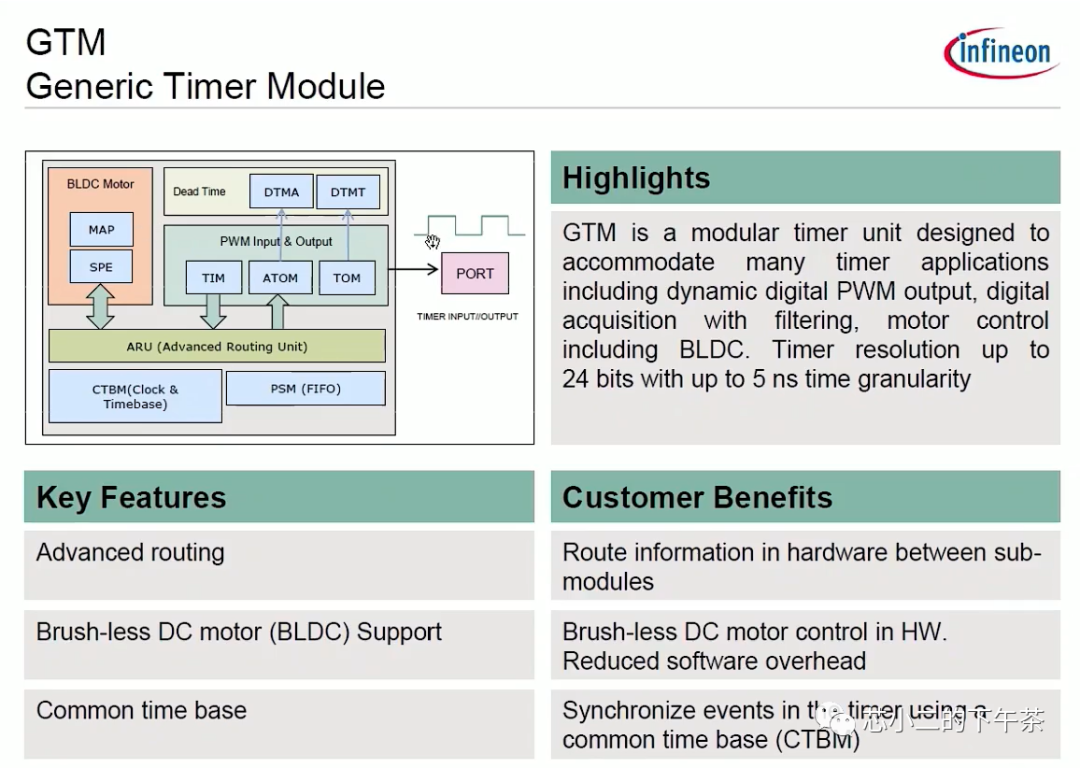
3GTM相關(guān)模塊介紹
GTM名義上雖是定時(shí)器,但是其實(shí)際功能及性能已經(jīng)超越了定時(shí)器,內(nèi)部包括SPE及MCS等為控制定義的小核;不同GTM版本支持的PWM分辨率不一樣,最高精度應(yīng)該在5ns;
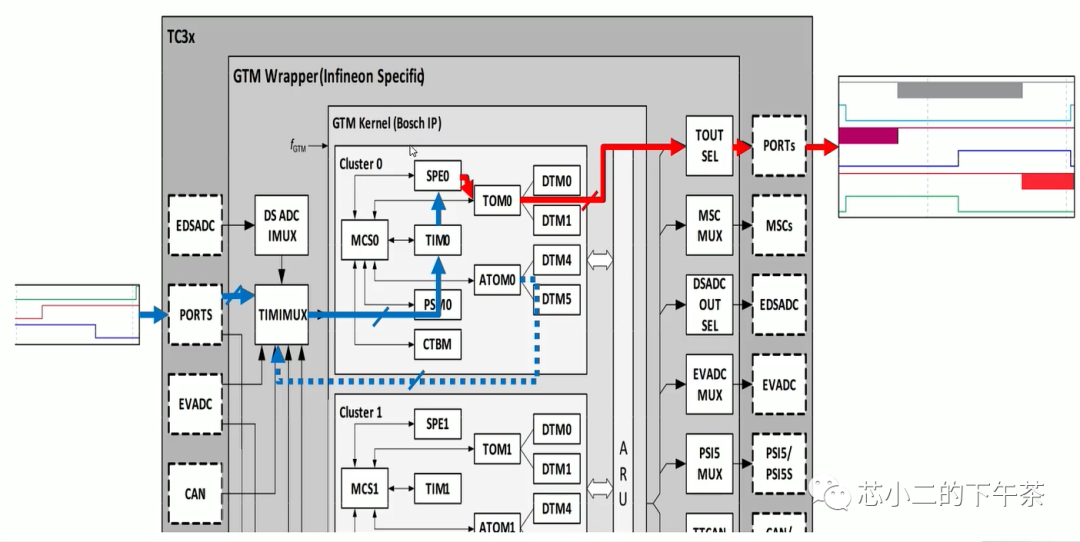
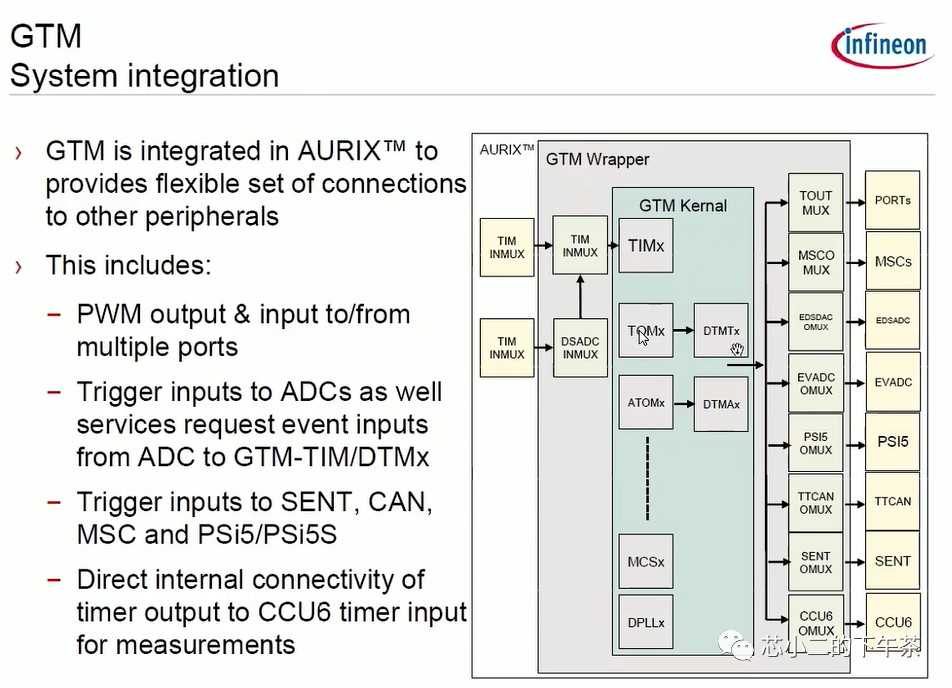
GTM系統(tǒng)層面,有一層Wrapper,把控制需要用到的包括ADC,通信外設(shè)等集成在一起
-
傳感器
+關(guān)注
關(guān)注
2564文章
52668瀏覽量
764305 -
控制器
+關(guān)注
關(guān)注
114文章
16998瀏覽量
183168 -
驅(qū)動(dòng)系統(tǒng)
+關(guān)注
關(guān)注
3文章
385瀏覽量
27827 -
BLDC
+關(guān)注
關(guān)注
213文章
830瀏覽量
98068 -
Aurix
+關(guān)注
關(guān)注
1文章
73瀏覽量
11284
發(fā)布評(píng)論請(qǐng)先 登錄
求一種基于Aurix TC377的BLDC驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論