 移動機器人的發展現狀及趨勢 HMS產品在移動機器人的應用
移動機器人的發展現狀及趨勢 HMS產品在移動機器人的應用
如今,無論是在工廠的倉庫,酒店的走廊,或是家中的客廳,我們都能看到移動機器人(AGV/AMR)的身影。它們因更便宜、更安全且比真實工人更高效而受大受歡迎。
這些機器人增加了企業的靈活性,允許在一個動態設施中整合執行不同任務的機器人。企業可以根據需求增加或減少移動機器人數量,并借助它們所收集大量實時數據,開啟工業物聯網之旅。
然而,由于環境的復雜多變,移動機器人制造商可能在以下通信方面遇到挑戰:
連接移動機器人到主流工業網絡
創建可靠的安全系統
確保可靠的 CAN 通信
根據現場需求建立不同的無線連接
遠程訪問移動機器人
HMS 的產品都采用模塊化設計,能夠在不改變硬件設計的情況下,靈活地幫助用戶更改網絡協議以滿足現場需求。
了解 HMS 產品在移動機器人的應用
1. 連接移動機器人到主流工業網絡
移動機器人需要與相關場所的控制器通信,它們之間往往使用不同的工業協議。例如,移動機器人可能使用 CANopen,控制器可能使用 PROFINET。移動機器人制造商可能希望在不同場所使用相同的移動機器人機型,但場所內的控制器使用另一工業網絡,如 EtherCAT。
如何讓移動機器人在不修改硬件的前提下,快速支持復雜的現場總線和工業以太網呢?
使用Anybus CompactCom 嵌入式或者Anybus Communicator 網關就可以做到。
嵌入式板卡及模塊
用戶只需將現有模塊替換成針對另一協議設計的模塊,就可以輕松地更換所支持的網絡。
Anybus CompactCom 嵌入式產品介紹
嵌入式 OR 網關?
總體而言,我們推薦您根據產品數量和所需要的網絡功能去挑選適合自己的產品:
對于產品數量較大的用戶來說,嵌入式產品可能是最佳選擇。Anybus CompactCom 嵌入式產品有模塊、板卡和芯片三種形態,模塊最適于快速上市,板卡則是高出貨量的經濟解決方案,而芯片是自行設計硬件的最佳選擇。
而對于產品數量較小的用戶來說,Anybus 網關產品是更經濟的選擇。
2. 創建可靠的安全系統
創建一個讓移動機器人可以安全運輸物資的系統是一項關鍵且富有挑戰性的任務。此外,為了順利出口,移動機器人還需符合不同地區和國家的安全標準。
使用 HMS 經過安全認證的產品,用戶能夠在滿足機械指令要求的同時,降低開發風險和成本,縮短認證過程和上市時間。
HMS 的Ixxat Safe是業內最全面的產品之一,集成了基于 EN ISO 13849 和 EN/IEC 62061 的安全 IO 和通信解決方案。
Ixxat Safe 產品獲得TüV Rhineland 預認證,達到PLe(類別 4)和 SIL3規定的性能要求,并附帶全套的實施和認證指南。因此,相較于自行開發,使用 Ixxat Safe 產品和借助 HMS 安全團隊的支持可以簡化最終產品認證,顯著縮短上市時間。
3. 確保可靠的 CAN 通信
移動機器人通常依賴 CAN 總線,確保機器人的可靠控制和高性能。不過,許多基于 CAN 的應用可能會遇到網絡飽和、錯誤傳播等網絡問題。
HMS 可以提供專業知識和現成產品,以建立與 CAN 網絡的可靠連接,并保護電子設備免受 EMI 的影響。
訪問 CAN 網絡
Ixxat PC 接口卡能夠確保與 CAN 或 CANopen 通信標準的可靠連接,使移動機器人制造商能夠訪問 CAN 網絡并監測其設備(如電池)的性能。
Ixxat PC 接口卡具有PCI、PCIe 或 USB、以太網和藍牙模塊版本,使移動機器人制造商能夠選擇最適合其需求的選項。
USB-to-CAN
 移動 USB-to-CAN 接口,方便 CAN (FD) 總線訪問實現配置、服務和分析。
移動 USB-to-CAN 接口,方便 CAN (FD) 總線訪問實現配置、服務和分析。
CAN-IB 系列
 功能強大的 CAN (FD) 插件板使測試/仿真系統連接到汽車總線系統或設備。
功能強大的 CAN (FD) 插件板使測試/仿真系統連接到汽車總線系統或設備。
CANblue II
 無線連接到汽車總線系統,實現靈活的分析、配置和測試。
無線連接到汽車總線系統,實現靈活的分析、配置和測試。
EMI 防護
Ixxat 中繼器在物理層上分離網絡,充當 EMI 過濾器并增添電氣隔離,從而保護電子產品免受 EMI 的干擾。
這一功能使移動機器人制造商能將容易受 EMI 影響的部分(如電池模塊)與其它部分(如傳感器模塊)隔離,或將高壓控制系統與電池管理系統的其余部分分離。對于需強力或長期電氣隔離的場景,HMS 的 CAN 中繼器可作為銅線到光纖轉換器使用,提供優異的 EMI 防護。
4. 根據現場需求建立不同的無線連接
移動機器人制造商在無線連接領域所面臨的一個主要挑戰是,如何便捷地更改無線技術,從而滿足特定環境中的網絡需求。
無線和蜂窩技術標準
Anybus 無線堡(Wireless Bolt)系列產品解決了此問題,它們提供了藍牙、Wi-Fi 和蜂窩版本(通過 NB-IoT 和 CAT-M1 標準,或通過高速 LTE Cat 4)。無線堡安裝便捷,支持不同版本的更換,滿足移動機器人制造商的現場需求。
無線堡介紹視頻
Anybus 無線堡達到IP66 和 IP67 等級的防護要求,可直接安裝在移動機器人上。為確保整個場地的連接覆蓋,用戶可以將無線堡與一個或多個工業無線接入點配對。
左:Anybus Wireless Bolt
右:Anybus Wireless Bridge
Anybus 無線橋(Wireless Bolt)則可以作為無線接入點使用。Bolt 與 Bridge 的組合已被多個客戶成功使用。
規劃和檢查設施
在安裝無線解決方案之前,建議進行基于設施圖紙的預測性現場勘察,以確保移動機器人在整個場地內都有足夠的信號覆蓋。現場勘察應識別接入點的最佳位置、合適的天線類型、天線方向,以及如何減少干擾。安裝完成后,可使用無線嗅探工具檢查設計,并根據需要調整接入點或天線。
選購 HMS 產品后,我們的專業售前工程師將幫助您規劃和檢查網絡設施,協助無線硬件安裝,并對安裝進行微調。
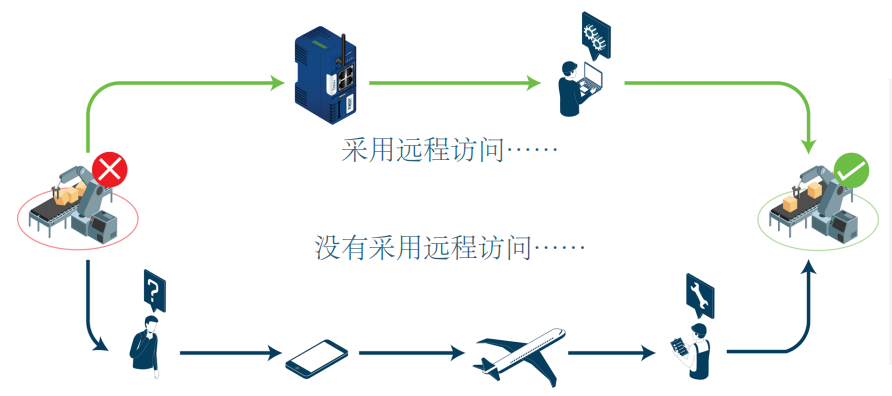
5. 遠程訪問移動機器人
通過遠程訪問,移動機器人供應商或工程師無需前往現場,就能迅速排除故障并解決大多數問題,提升客戶體驗,并最大限度地減少停機時間。
易用且可靠
Ewon 的設備和工業云服務能夠幫助移動機器人制造商迅速建立安全遠程連接。Ewon Cosy是一款工業路由器,Ewon Flexy則集工業路由器和物聯網網關于一體。這兩款設備均連接到工業云Talk2M,使得遠程訪問和檢查變得直觀易用。Talk2M 的設計非常直觀明了,用戶只需要一點培訓和 IT 技能就可以使用該軟件。
Ewon Flexy 及擴展卡
移動機器人制造商可以利用配備 Talk2M 的設備來排除故障、修正 PLC 錯誤、遠程操作人機界面或操作 IP 攝像頭。這兩款設備與絕大多數 PLC 和舊設備兼容。
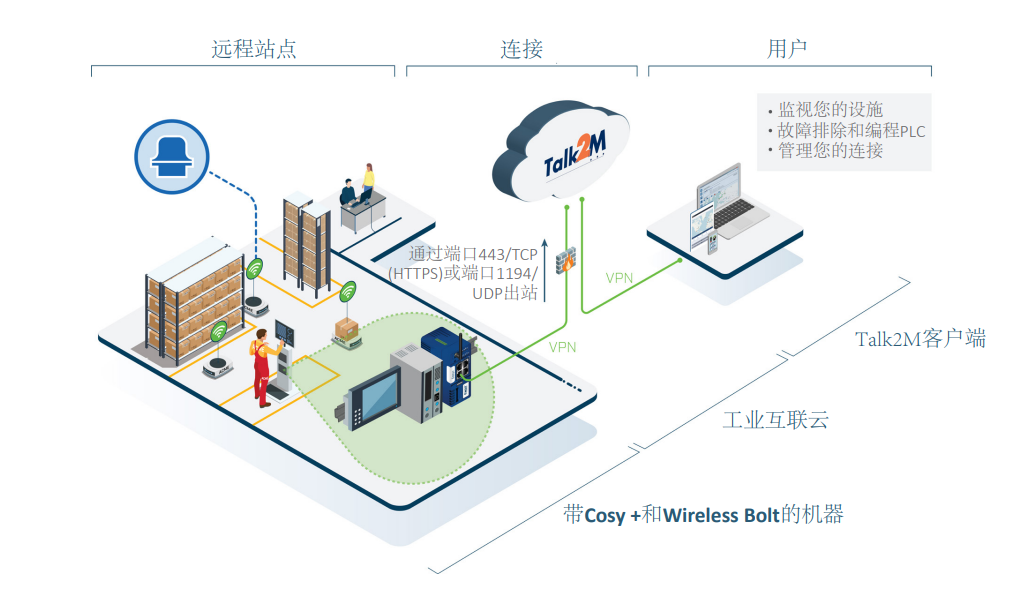 Talk2M 工業云使用戶可以遠程連接到他們的機器
Talk2M 工業云使用戶可以遠程連接到他們的機器
Ewon Flexy 也可作為工業物聯網網關,監控和收集關鍵性能指標,從而優化操作有效性。它可以將數據從機器傳輸到云端,方便深入分析和預測性維護。
Ewon 在21個數據中心的30多臺服務器上部署了 Talk2M,以確保冗余和全球覆蓋。
網絡安全
Ewon 通過采取多層安全策略,將安全性整合到每一個遠程訪問產品和軟件應用程序中。借助此策略,Ewon 可以克服諸多安全挑戰,從而獲得 IT 部門的批準。
移動機器人需要強健、全面的通信技術,確保安全、高效地運輸物資。對于移動機器人制造商來說,自行開發所需技術既復雜又耗時,選擇 HMS 的解決方案既經濟又高效。
HMS 在北京和蘇州都設有辦公室,為客戶提供優質的本地化服務。
從方案咨詢到驗證,我們憑借專業知識和豐富產品,助您快速克服移動機器人通信和安全挑戰,成為您的優選通信合作伙伴。
審核編輯:彭菁
-
控制器
+關注
關注
114文章
16822瀏覽量
182163 -
硬件
+關注
關注
11文章
3444瀏覽量
67006 -
工業網絡
+關注
關注
0文章
96瀏覽量
16593 -
移動機器人
+關注
關注
2文章
782瀏覽量
33919 -
HMS
+關注
關注
0文章
120瀏覽量
6908
原文標題:AGV/AMR 領域的 5 大通信挑戰是什么?HMS 帶您逐個擊破
文章出處:【微信號:麥克泰技術,微信公眾號:麥克泰技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論