 基于樹莓派的交互機器人設計
基于樹莓派的交互機器人設計
今天小編給大家帶來的是加拿大Maker Levent Erenler 的DOLY robot的機器人項目,該項目基于樹莓派CM4(Raspberry Pi Compute Module 4)打造,集人臉識別、語音識別、物體識別、桌面助手、移動監控于一身,可以作為學習開發平臺使用模塊化編程。
材料清單
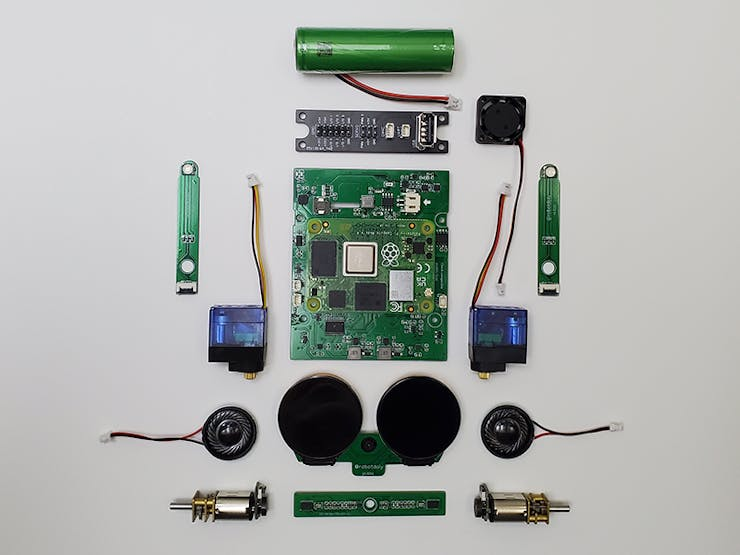
硬件:
Raspberry PI Computer Module 4
8兆像素索尼IMX219攝像頭
觸摸傳感器 * 2
6軸IMU傳感器
TOF 傳感器 * 2
紅外邊緣傳感器 *4
麥克風 * 2
揚聲器 * 2
9克舵機 * 2
圓形LCD屏幕 * 2
18650電池 *1
其他:
3D打印的機器人外殼
3D打印的TPU機器人履帶
STEP 1 - 3D打印
所有的3D打印文件都可以在GitHup找到,文件中有兩種打印文件,以“FDM”開頭的文件需要 FDM 3D 打印機。以“SLA”開頭的文件需要 SLA 3D 打印機。打印文件下載地址https://github.com/robotdoly/DOLY-DIY/tree/main/STL
使用 PLA 打印很容易,但我建議為底蓋打印 PETG 或 ABS 等耐熱絲,這樣可以提升Doly robot的整體強度,質感也會更好
手部的打印結構優先選用半透明的樹脂材料打印,這樣手燈效果會更好
采用 NinjaFlex 85A TPU 打印的軌道
STEP 2 - 準備零件
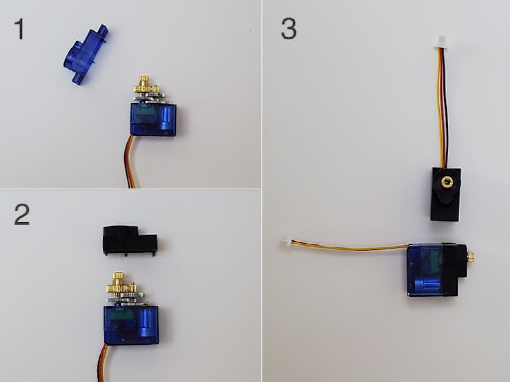
舵機改裝:
取下底蓋
重新焊裝舵機線,長度預留6厘米
裝回底蓋
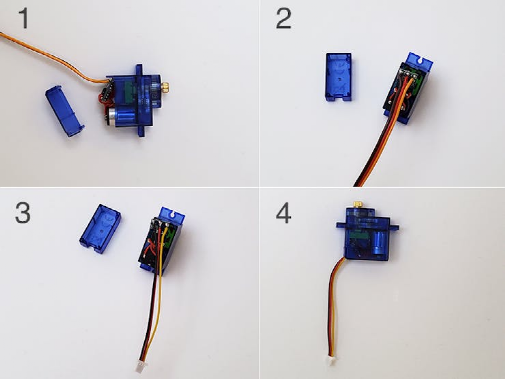
更換光固化的打印的舵機頂蓋
充電接口制作
*按 1:1 比例打印隨附的連接器圖;
*用雙面膠帶將打印紙粘貼到銅片上;
*切割圖紙區域;
*如圖所示彎曲邊緣;
*撕掉膠帶和紙;
STEP 3 - 電子元件
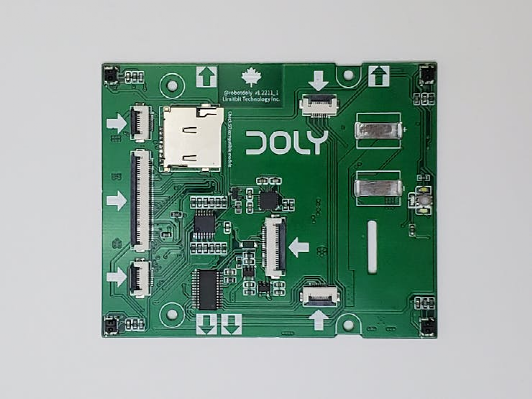
PCB板設計
如果您想自己動手,可以從鏈接訪問原理圖、Gerber 文件和 BOM 文件。
將電子元件放置在 PCB 上后,您必須借助 3D 打印對準器將 LCD 與 Eye PCB 對齊,該對準器位于“LCD_aligner.STL”排插接口中。
* 將Eye PCB 放入對準器中,如圖所示。
* 使用雙面膠帶將 LCD 粘合到 PCB 上。
* 取下 LCD 塑料蓋。
* 應用屏幕保護玻璃。




STEP 4 - 組裝
本視頻系列將向您展示如何組裝 DIY Doly 機器人。
STEP 5 - 充電器組裝
3D打印零件
充電器組裝
打印完 3D 零件后,您將需要組裝充電器板。原理圖和組件列表 (BOM) 位于此鏈接。
當所有 3D 打印部件準備就緒后,
小心地在頂面和底面涂上膠水。
確保膠水遠離邊緣。
確保零件正確對齊。
將頂部固定到底部。
幾分鐘后安裝充電器模塊并用四顆螺釘固定底蓋。
軟件
您可以在此鏈接中找到包含驅動程序、模塊和庫的預編譯內核映像。
我正在研究示例來演示如何控制和訪問功能,但是您可以在此處找到一些 C++ 示例。
與 Picovoice 進行語音交互。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2553文章
51467瀏覽量
756963 -
機器人
+關注
關注
211文章
28704瀏覽量
208685 -
人臉識別
+關注
關注
76文章
4021瀏覽量
82384 -
樹莓派
+關注
關注
117文章
1710瀏覽量
105899
原文標題:創客項目秀|基于樹莓派的交互機器人-Doly
文章出處:【微信號:ChaiHuoMakerSpace,微信公眾號:柴火創客空間】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于樹莓派的四足噴水機器人設計


變形樂高玩具變形和樹莓派一起玩出樂高機器人!
樹莓派打造視頻監控機器人Verybot
有關樹莓派制作機器人平臺的探索
請教利用樹莓派制作六足機器人的問題
樹莓派語音識別機器人(下)
【orangepi zero申請】基于香橙pi的機器人設計
基于SLAM的移動機器人設計
基于樹莓派的監控機器人設計


基于樹莓派的機器人設計方案






 工商網監
工商網監
評論