 通過RA MCU和微型ROS簡化機器人設計流程
通過RA MCU和微型ROS簡化機器人設計流程

隨著工業4.0和工業物聯網的發展,機器人技術的需求變得越來越重要。同時,市場需要提供易于使用的架構,簡化設計流程,并顯著降低客戶在各種應用中的設計風險。為了滿足市場需求,瑞薩電子提供了基于MCU的micro-ROS解決方案。micro-ROS是一個使用ROS 2的機器人控制系統的開源項目,ROS 2是第二代ROS(機器人操作系統),用于微控制器上的各種機器人系統。
在本篇文章中,您將了解用于微型ROS實現工業機器手的最佳硬件和軟件平臺,這些平臺可以使用RA6系列MCU上的解決方案簡化設計過程。RA家族及其RA6系列MCU適用于需要以太網、CAN-FD、經得起未來考驗的安全性、大尺寸嵌入式RAM以及運行閃存CoreMark?算法的低至107uA/MHz的低功耗物聯網應用。更多詳情,您可在后文“相關資料”中查看瑞薩RA系列網頁網址。
在瑞薩電子與合作伙伴eProsima的共同努力下,我們開發了一個機械手演示系統,通過在RA6M5MCU上的通信接口來控制機械臂,以展示基于MCU的機器人控制伺服電機的能力,如通過編程操作來抓取和改變物體位置的能力,以及通過游戲手柄與PC通信來進行手動操作的能力等。這個演示是使用商業OpenManipulator-X平臺開發的。
通過RViz(ROS可視化GUI)可操作物體塊,Rviz是機器人、傳感器和算法的通用3D可視化環境,用于將物體塊從A點移動到B點。

圖1. 機器人手臂
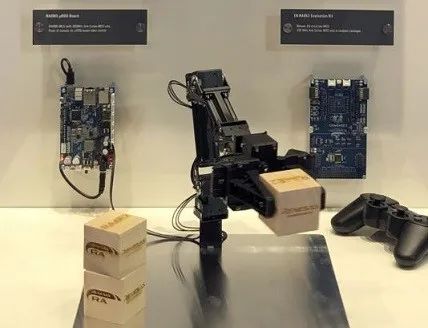
圖2. 機器人手臂+基于ROS的機器人身體控制器(JP177)
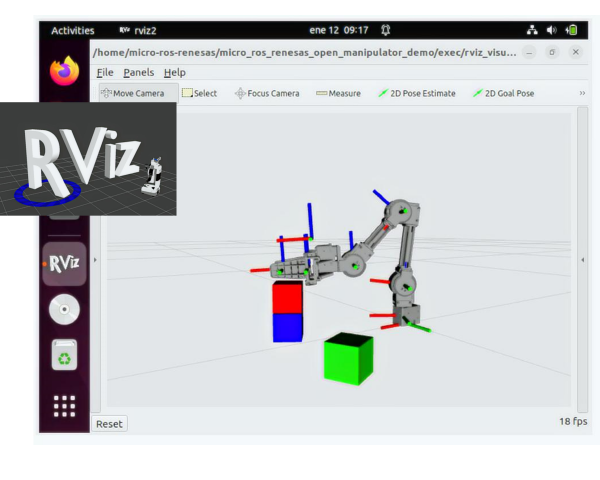
圖3. 圖形用戶界面
RA6M5功能
通過即插即用的USB,使用micro-ROS與ROS 2通信;
機械手伺服的自動和引導控制;
從伺服器中檢索機械手位置并在RViz上顯示;
看門狗:檢測通信問題,通過停止機械手運動措施來保證安全。
PC功能
運行micro-ROS代理與開發板通信;
使用常規ROS 2推送器來發送游戲手柄命令;
顯示RViz上的機械手運動。
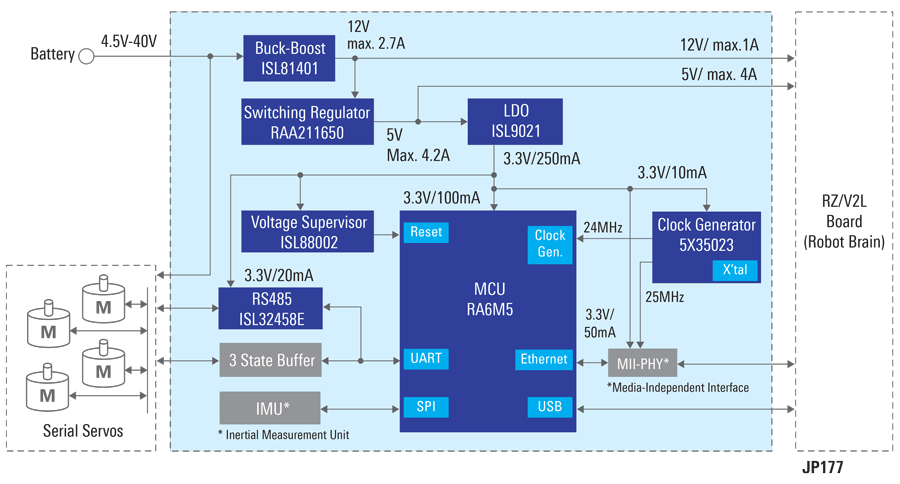
我們使用基于ROS的機器人身體控制器作為MCU平臺,在OpenManipulator-X中實現。瑞薩電子在成功產品組合網頁上介紹了使用RA6M5的基于ROS的機器人本體控制器的綜合系統級框圖。基于ROS的機器人本體控制器在微控制器上實現ROS 2節點,并在通用框架中實現傳統機器人與物聯網傳感器和設備之間的互操作性。在基于ROS的機器人本體控制器上,系統設計人員可以通過單線UART和RS-485控制多個伺服系統,這有助于降低各種應用程序初始設計的開發成本和時間,如物流和倉庫的服務機器人、安全、農業和醫療保健等。
基于ROS的機器人本體控制器系統框圖
EK-RA6M5(評估套件)是用于RA6M5的MCU評估套件,可用于一般評估,并且是micro-ROS組織官方支持的評估套件。該套件包含快速啟動MCU評估所需的所有必要的硬件功能和預編程代碼。在micro-ROS GitHub頁面上,您可以在瑞薩電子e2studio和其他開發平臺下載支持RA6M5和RA6T2的micro-ROS軟件包。具體請在文末查看micro-ROS解決方案支持資源的鏈接。
eProsima評論:此解決方案演示了一個簡化的示例,說明如何將類似的方法應用于更大、更復雜的工業場景,如倉庫或生產線。eProsima是一家專門提供針對機器人、物聯網和汽車行業的中間件解決方案的公司。eProsima和瑞薩電子的合作將促進基于嵌入式設備的新型機器人應用的擴展。micro-ROS彌合了微控制器和ROS 2之間的差距,高性能RA系列的官方支持使客戶能夠在工業4.0和工業物聯網領域進行經濟高效的開發。
來源:瑞薩電子
免責聲明:本文為轉載文章,轉載此文目的在于傳遞更多信息,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請聯系小編進行處理
審核編輯 黃宇
-
mcu
+關注
關注
146文章
17956瀏覽量
365881 -
機器人
+關注
關注
213文章
29697瀏覽量
212598 -
物聯網
+關注
關注
2930文章
46188瀏覽量
391579 -
RA
+關注
關注
0文章
23瀏覽量
24941 -
ROS
+關注
關注
1文章
287瀏覽量
17708
發布評論請先 登錄
瑞薩電子RA MCU集成micro-ROS框架,簡化專業機器人開發

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
ROS機器人定位導航仿真
怎樣將微型ROS移植到機器人的RA MCU中呢
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
基于FreeRTOS的micro(微型)ROS

基于Wild Thumper的ROS機器人設計
瑞薩將micro-ROS移植到RA MCU中
瑞薩電子與 eProsima 合作,將微型 ROS 移植到機器人的 RA MCU 中






 工商網監
工商網監
評論