 基于Buck變換器Matlab閉環仿真
基于Buck變換器Matlab閉環仿真
分為三大主要內容:
一、拓撲參數計算
二、開環和單、雙閉環M文件配置及仿真
三、Tunner工具仿真雙閉環
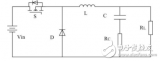
1.1 Buck拓撲關鍵參數計算
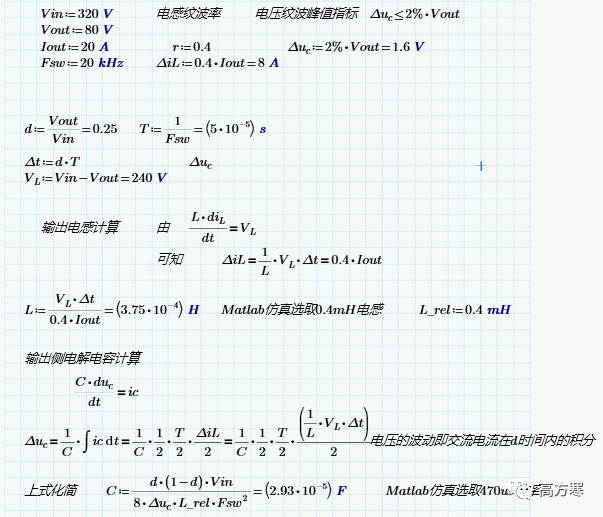
1.2 閉環仿真驗證Buck參數指標

輸出電壓紋波在1.6V以內,設置輸出電容合理

電感紋波接近8A,設置輸出電感合理

2.1 開環模型

仿真結果:較大的過沖,可以使用M文件運行看搭建開環模型是否接近合理。

L=0.0004;
r=0;
C=0.000047;
R=4;
VIN=320;
Vout=80;
Ts=1/20000;
D=0.25;
s=tf('s');%傳遞函數變量
%主函數對應的開環傳遞函數
Hs=1/(L*C*s^2+L/R*s+r*(C*s+1/R)+1);
% bode(Hs);
% hold on
step(Hs*80,0.05) %觀察主電路開環階躍響應;Hs*80等于此電路輸出電壓,運行0.05s

主電路開環階躍響應如上所示,說明開環模型輸入數值正確,開環模型搭建完成,仿真器步長選擇合理(目前選擇的寄生參數,影響較小),進入下一步操作;
M文件代碼如下
%% PI控制器
Voltage_ki=35; %引入PI控制器,無法抑制波特圖震蕩凸起的尖峰(閉環傳遞),尖峰依舊存在,反映仿真時,輸出過沖嚴重;穿越頻率不是-20db,相位裕度也較小。
Voltage_kp=10; %只引入積分控制,輸出電壓波動無法抑制,積分器濾波輸出電壓波動,無法反饋
G_voltage_pi=Voltage_ki/s+Voltage_kp; %kp增大觀察波形,輸出震蕩嚴重,最后選用0.2
G_voltage_open=G_voltage_pi*Hs;
% bode(G_voltage_open);
% hold on
% bode(G_voltage_open/(1+G_voltage_open));
試揍調節PI參數,當P等于35,I等于10時,觀察波特圖如下所示,系統整體開環傳遞函數G_voltage_open 帶寬接近4K,相位裕度接近10°左右,系統很不穩定,運行此參數的輸出電壓仿真波形如下:

運行此參數的輸出電壓仿真波形如下:雖然輸出電壓響應速度很快,由于帶寬較大,相位裕度很差,穿越頻率呈現-2斜率(這里的PI控制器只能緩沖PI初始極點的影響,主功率LC雙重極點還是沒法補償)

繼續調節PI參數,當P等于35,I等于1時,可以看到,輸出電壓速度200m左右才達到穩定,這里還沒有做動態,不言而喻,做動態肯定差;

一開始的地方出現震蕩,主要還是閉環傳遞函數波特圖在穿越頻率處尖峰的影響,波特圖如下所示,如右邊第二個橙色波形。當P等于35,I等于0.3時,帶寬明顯較低,如標識的角頻率和相位裕度。再次對此參數代入PI控制器,輸出電壓波形如下所示:可以看到,輸出開啟尖峰明顯減小。也可以改變I參數試試效果


上節說到的PI控制器補償,其實用于Buck電路中,是微乎其微的,這里只是做一個簡單的PI控制講述,數字PI參數對波形的影響效果;接著上一節,講述PID控制器補償
2.3單電壓環 PID控制器補償仿真
模型如下所示

M文件調試代碼如下
%% 使用PID控制器調節 沒有考慮到輸出電容的ESR情況下,屬于二型補償網絡,下面的PID形式只有兩個零點
k=140; %先定k值,k值影響穿越頻率,穿越頻率設置在開關頻率的1/10處,再調節T1,T2;
T1=1/100;
T2=1/10000; %T1,T2的值,可以先觀察主電路的振蕩凸起的波形的頻率位置,再選擇放置T2;T2放置在凸起頻率右側,穿越頻率-20db穿越,波特圖可以對比
G_voltage_kp=k*T1*(1+T2/T1);
G_voltage_ki=k*T1/T1;
G_voltage_kd=k*T1*T2; %根據T1,T2,k值配置后,計算出PID參數,代入模型中
G_voltage_pid=k*(1+T1*s)*(T2*s+1)/s; %只有兩個零點,一個積分器
bode(G_voltage_pid*Hs);
hold on
bode(G_voltage_pid);
hold on
% bode(G_voltage_pid*Hs/1+G_voltage_pid*Hs);
這里的穿越調試在2K左右,如下波特圖所示,由于這邊的PID只有兩個零點,一個零點緩沖了初始極點的影響,另一個零點補在了主功率雙極點的右側,抵消了一個極點的影響,剩下-1斜率穿越;(零極點配置法,如果要考慮輸出電容ESR的影響,PID需要加上極點),如我配置的另一個案例,可以多加一兩個極點,當然,高頻極點越多越好;配置完后,可以按照上例,M文件自動導出封裝好的PID參數(變量最好放在變量工作區,方便瀏覽),再代入數字PID控制器;需要提到一點,如果考慮輸出電容ESR的影響,主功率原始系統開環傳遞函數需要在分子上加一個零點;再作為級聯傳遞函數的一部分,再進行波特圖補償。
T1=1/1884; %放置一個零點在雙重極點的角頻率位置的1/2處,緩沖PI控制器極點對系統的不利影響
T2=1/3768; %T2零點放置在LC雙重極點的0.8~1之間,穿越頻率-20db穿越,波特圖可以對比
T3=1/(2*pi*fc);
G_voltage_pid=k*(1+T1*s)*(T2*s+1)/(s*(1+T3*s));
實際補償中,只使用一個零點和極點的控制器,最多只能實現在穿越頻率處相位裕度拉高90°(零點和極點位置距離很遠才能實現);使用兩個極點和零點補償能拉升180°相位,操作較為靈活。

運行該參數的實際效果:可以看到,相比PI補償器,PID補償后的響應速度加快;

2.4 單電流環補償仿真
單電流環模型如下所示

M代碼如下所示
current_kp=3;
current_ki=90;
k3=0 %當k等于0時,開環比閉環傳遞函數的帶寬變低,可以觀察閉環波特圖
G_current_pi=current_kp+current_ki/s;
Gs_current=G_current_pi/(L*s+r); %不考慮輸出電壓擾動,輸出電壓前饋,k值等于1時
Gs_current1=G_current_pi*(R*C*s+1)/((R*C*s+1)*(L*s+r)+(1-k3)*R); %k值不等于1時
bode(Gs_current);
hold on
bode(Gs_current1);
hold on
bode(Gs_current/(Gs_current+1));
bode(Gs_current1/(Gs_current1+1));
可以看到,輸出電壓在2ms內已經達到穩定,響應很快(加入輸出電壓前饋)
分析對比加入電壓全前饋和不加前饋波特圖對比

由上面波特圖可以發現,不帶電壓前饋的閉環傳遞函數,在低頻段已經出現小于0db的情況,說明了不帶電壓前饋功能的帶寬速度很低,待會仿真看看輸出電壓效果既可以,如下圖所示:需要經過很長時間才能達到穩定狀態

2.5 電流電壓雙閉環控制
控制模型如下所示

輸出電壓仿真結果如下所示:輸出電壓在10ms內達到穩定,輸出無靜差

來看下外環電壓環的帶寬情況,觀察波特圖:可以看到,外環電壓環帶寬其實很低,才100Hz左右,但是輸出看出來,好像還不錯,其原因在于其擁有內環(電流環),雙環控制,能采集更多的信息;快速性方面還得觀察動態響應波形

來觀察的雙閉環下的動態響應波形,負載在10A~20A之間跳變,如下所示

可以看到,動態響應,輸出雖然沒有阻尼震蕩的現象(不帶電壓前饋),但過沖和恢復時間較差,特別是過沖,根本原因主要在于輸出電容取值較小和閉環PI參數設置還得繼續優化(帶寬/電壓環和電流環的跟蹤性)。
3.1 整定電流環

3.2 整定電壓外環
先把電流內環的PI參數整定出來,和前面的零極點配置法進行對比,電流內環整定后,輸出電壓盡量不要小震蕩,會影響整個系統的動態響應波形。電流環整定后,作為整個系統的內環,再進行整定電壓環。

整定后的輸出電壓動態響應波形(還可以繼續優化)

3.3 tunner工具整定中,簡要說明

其中電流環整定中,模型辨識Structure這里要選擇一階系統,電壓外環整定中,選定二階阻尼震蕩系統,外加一個零點(ESR)
-
matlab
+關注
關注
188文章
2998瀏覽量
233384 -
BUCK
+關注
關注
32文章
487瀏覽量
65801 -
變換器
+關注
關注
17文章
2132瀏覽量
110469 -
閉環仿真
+關注
關注
0文章
3瀏覽量
4361
發布評論請先 登錄
單級BUCK-BOOST變換器實現APFC的原理及分析
buck級聯推挽變換器小信號建模的問題
ZCS-PWM Buck變換器的工作原理是什么?
DCM_Buck_Boost變換器的建模與控制設計講解

buck變換器介紹_buck變換器matlab仿真
buck變換器設計_自制buck變換器
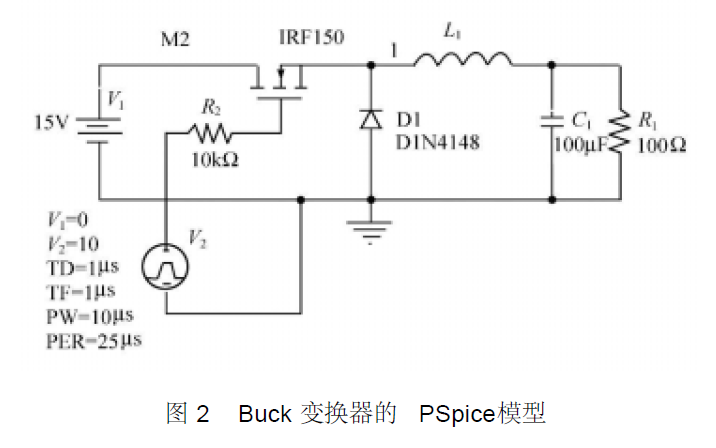
使用PSpice進行Buck變換器的仿真研究的資料說明
如何在Buck DCDC變換器輸出電壓紋波是進行仿真研究的資料說明
Buck變換器的工作原理與設計的學習課件免費下載





 工商網監
工商網監
評論