") 讓人恐懼的是,機(jī)器狗已經(jīng)能做這種事了
讓人恐懼的是,機(jī)器狗已經(jīng)能做這種事了

只用一個(gè)神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)操縱,四足機(jī)器人的重大技術(shù)突破。
跑酷是一項(xiàng)極限運(yùn)動(dòng),需要參與者以高度動(dòng)態(tài)的方式跨越障礙,對(duì)于大多數(shù)時(shí)候「笨手笨腳」的機(jī)器人來(lái)說(shuō),這似乎是件遙不可及的事,不過(guò)最近在機(jī)器人控制領(lǐng)域里出現(xiàn)了一些技術(shù)突破的趨勢(shì)。幾周前,機(jī)器之心曾報(bào)道過(guò)一個(gè)使用強(qiáng)化學(xué)習(xí)方法讓機(jī)器狗實(shí)現(xiàn)跑酷的研究,實(shí)現(xiàn)了不錯(cuò)的效果。
最近,卡內(nèi)基梅隆大學(xué)(CMU)的一項(xiàng)新研究也針對(duì)機(jī)器狗跑酷的挑戰(zhàn)提出了新方法,效果又上了一個(gè)臺(tái)階,以至于人們的評(píng)價(jià)一致是:amazing.

觀眾:「是《黑鏡》里面演的樣子」。
CMU 的這項(xiàng)研究讓機(jī)器狗可以像狗狗障礙賽里的選手一樣,自動(dòng)越過(guò)不連續(xù)的箱子,在不同角度傾斜的坡面之間輕松地跑跳:
而且通過(guò)這些障礙的速度也很快。
輕松跳過(guò) 0.8 米(機(jī)器狗長(zhǎng)度的 2 倍)的間距:
爬上 0.51 米高(機(jī)器狗高度的 2 倍)的障礙物:
這回沒(méi)有一把站穩(wěn),它還用后腿進(jìn)行了補(bǔ)救,動(dòng)作像真的狗一樣。
機(jī)器狗還可以做一些真實(shí)世界里動(dòng)物難以完成的事,比如僅用兩條前腿行走,相當(dāng)于倒立行走:
還能僅用兩條前腿下樓梯:
像在游戲里面卡了 bug,有點(diǎn)滑稽,又帶有一點(diǎn)點(diǎn)恐怖谷效應(yīng)。
該研究旨在讓小型低成本機(jī)器狗能夠完成跑酷任務(wù)。這類機(jī)器狗的驅(qū)動(dòng)不精確,且僅有用于感知的單個(gè)前置深度攝像頭,頻率低、容易出現(xiàn)抖動(dòng)和偽影。
基于此,該研究提出一種直接從原始深度和機(jī)載傳感到關(guān)節(jié)角度命令的神經(jīng)網(wǎng)絡(luò),并通過(guò)大規(guī)模強(qiáng)化學(xué)習(xí)進(jìn)行模擬訓(xùn)練,以克服不精確的傳感和驅(qū)動(dòng)帶來(lái)的問(wèn)題,端到端地輸出高度精確的控制行為。研究項(xiàng)目已開(kāi)源。
-
論文地址:https://extreme-parkour.github.io/resources/parkour.pdf
-
項(xiàng)目地址:https://github.com/chengxuxin/extreme-parkour
方法簡(jiǎn)介
該研究通過(guò)端到端數(shù)據(jù)驅(qū)動(dòng)的強(qiáng)化學(xué)習(xí)框架使機(jī)器狗具備「跑酷」的能力。為了讓機(jī)器狗在部署時(shí)根據(jù)障礙物類型進(jìn)行自我調(diào)整,該研究提出了一種新穎的雙重蒸餾(dual distillation)方法。該策略不僅能輸出靈活的運(yùn)動(dòng)命令,還可以根據(jù)輸入深度圖像快速調(diào)整方向。
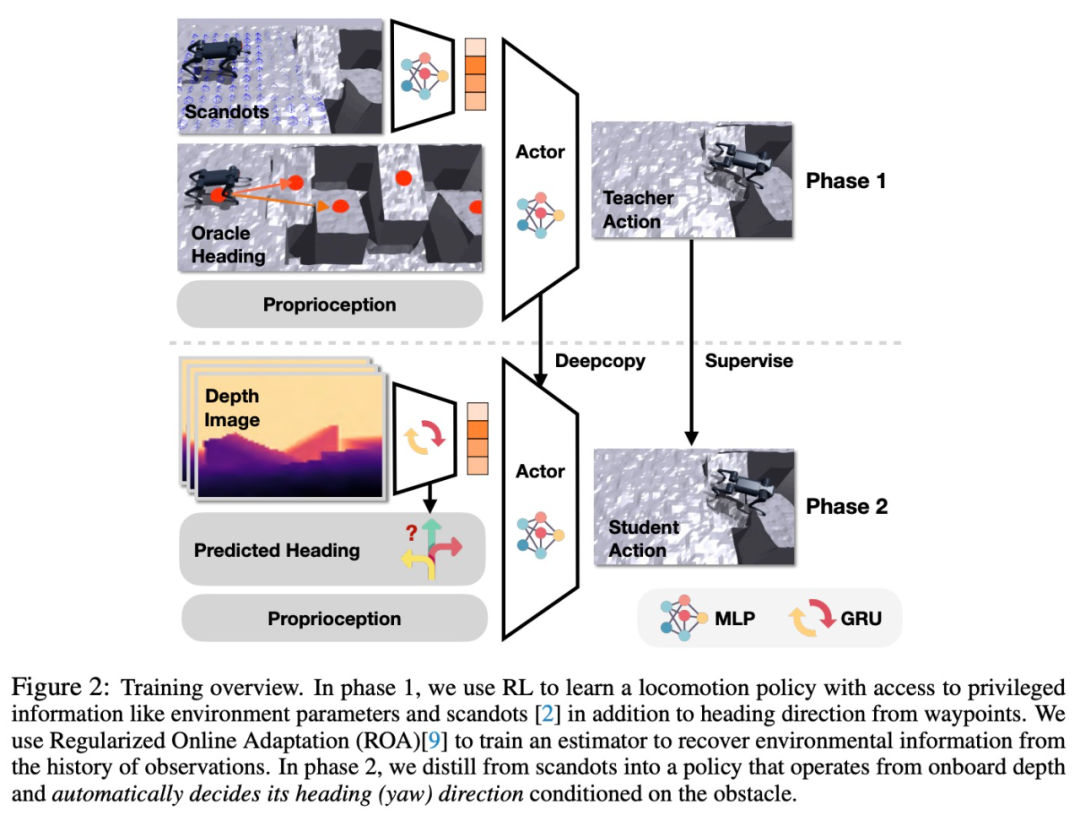
為了讓單個(gè)神經(jīng)網(wǎng)絡(luò)能夠表征不同的跑酷技能行為,該研究提出了一種基于內(nèi)積的簡(jiǎn)單而有效的通用獎(jiǎng)勵(lì)設(shè)計(jì)原則。
具體來(lái)說(shuō),該研究旨在訓(xùn)練一個(gè)直接從原始深度和機(jī)載傳感到關(guān)節(jié)角度命令的神經(jīng)網(wǎng)絡(luò)。為了訓(xùn)練適應(yīng)性運(yùn)動(dòng)策略,該研究采用了正則化在線適應(yīng)(ROA)方法,并針對(duì)極限跑酷任務(wù)進(jìn)行了關(guān)鍵修改。
實(shí)驗(yàn)結(jié)果
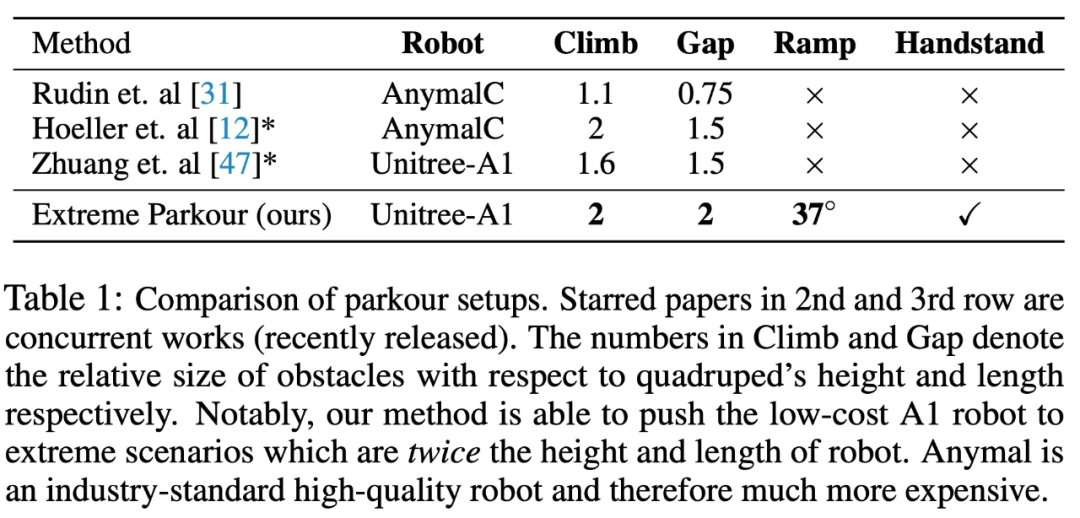
該研究主要讓機(jī)器狗掌握 4 種技能,包括攀爬、跳過(guò)間距、在斜坡上跑跳、倒立,與其他幾種方法的比較結(jié)果如下表 1 所示:
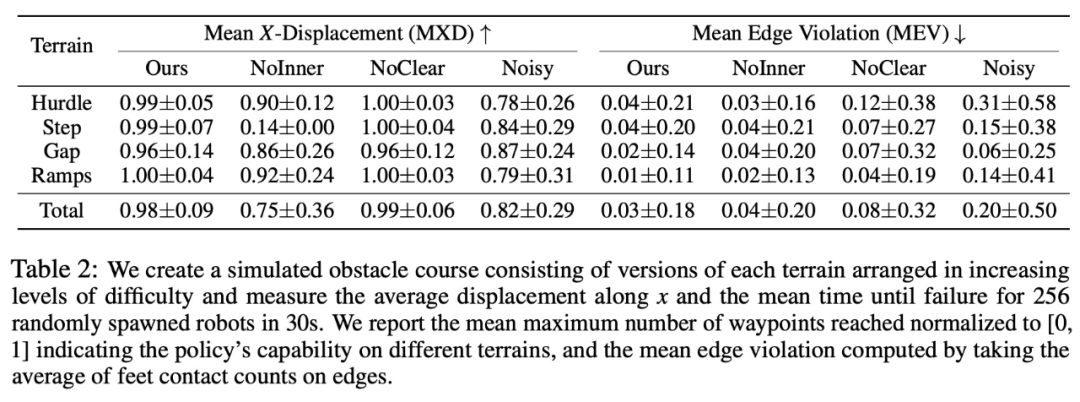
為了驗(yàn)證系統(tǒng)中各部分的作用,該研究提出了兩組基線。該研究首先測(cè)試了獎(jiǎng)勵(lì)設(shè)計(jì)和整體 pipeline,結(jié)果如下表 2 所示:
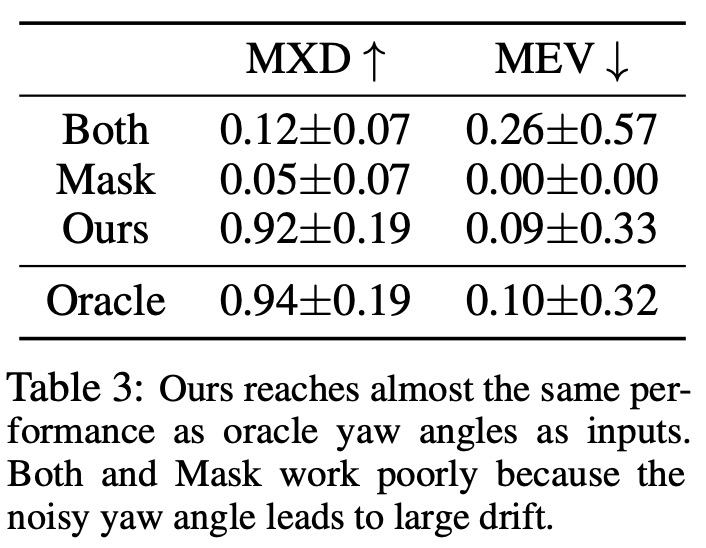
第二組基線旨在測(cè)試蒸餾設(shè)置,其中涉及用于方向預(yù)測(cè)的 BC 和用于動(dòng)作的 dagger,實(shí)驗(yàn)結(jié)果如下表 3 所示:
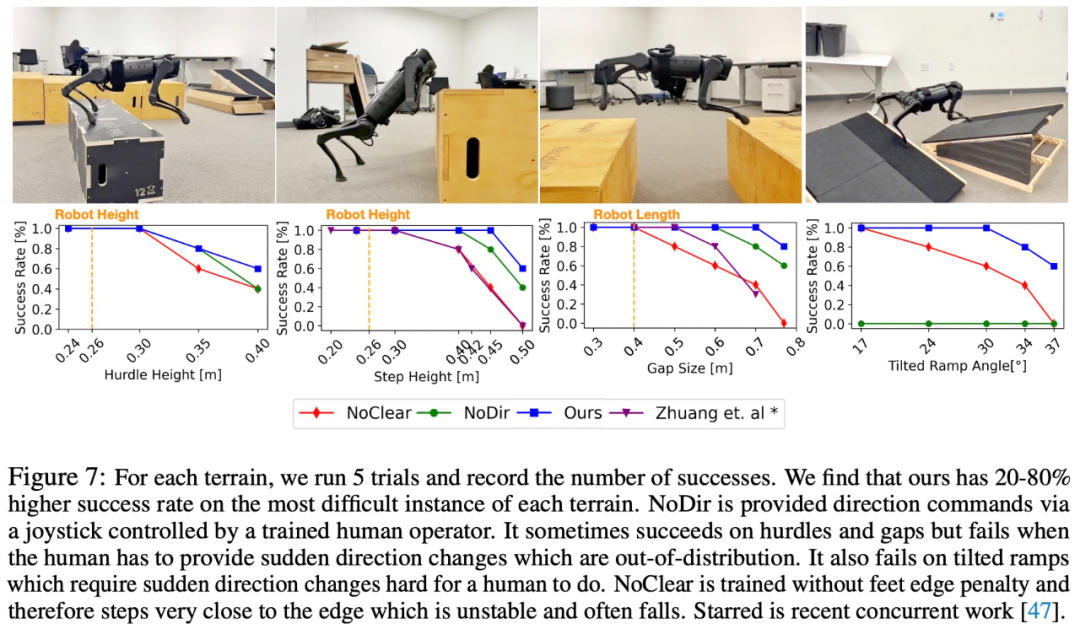
此外,該研究還進(jìn)行了很多現(xiàn)實(shí)實(shí)驗(yàn)(記錄成功率),并與 NoClear 和 NoDir 基線進(jìn)行比較,實(shí)驗(yàn)結(jié)果如下圖 7 所示:
原文標(biāo)題:讓人恐懼的是,機(jī)器狗已經(jīng)能做這種事了
文章出處:【微信公眾號(hào):智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2930文章
46116瀏覽量
390624
原文標(biāo)題:讓人恐懼的是,機(jī)器狗已經(jīng)能做這種事了
文章出處:【微信號(hào):tyutcsplab,微信公眾號(hào):智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
大負(fù)載協(xié)作機(jī)器人還能做到多大
工業(yè)通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機(jī)器人的“紅線”
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
還在糾結(jié)人工or智能?有些工廠已經(jīng)用聯(lián)核叉車機(jī)器人創(chuàng)造財(cái)富啦

樹莓派遇上機(jī)器狗:科技界的“春晚明星”是怎樣煉成的?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論