") 工業(yè)鏡頭的景深、分辨率及如何匹配合適的工業(yè)相機(jī)
工業(yè)鏡頭的景深、分辨率及如何匹配合適的工業(yè)相機(jī)
1、景深
景深即在鏡頭架設(shè)好后,與被測(cè)物體間相對(duì)距離不做任何調(diào)節(jié)的情況下,可接受的能清晰成像的物方空間范圍。
在機(jī)器視覺(jué)中,相機(jī)芯片為光學(xué)系統(tǒng)的像平面,物方與像平面共軛的平面稱(chēng)為對(duì)準(zhǔn)平面。嚴(yán)格的來(lái)講除對(duì)準(zhǔn)平面上的點(diǎn)能成點(diǎn)像外,其他空間點(diǎn)在像平面上成像為彌散斑。但由于芯片的分辨率是有限的,因此當(dāng)彌散斑小于一定限度時(shí),仍可認(rèn)為是一個(gè)像點(diǎn),即成像清晰。
因此景深定義為:能在像平面上獲得清晰像的物方空間深度范圍稱(chēng)為景深。能成清晰像的最遠(yuǎn)的物平面稱(chēng)為遠(yuǎn)景平面,它與對(duì)準(zhǔn)平面的距離稱(chēng)為遠(yuǎn)景深度Δ1;能成清晰像的最近的物平面稱(chēng)為近景平面,它與對(duì)準(zhǔn)平面的距離稱(chēng)為近景深度Δ2;景深=遠(yuǎn)景深度+近景深度。如下圖所示:
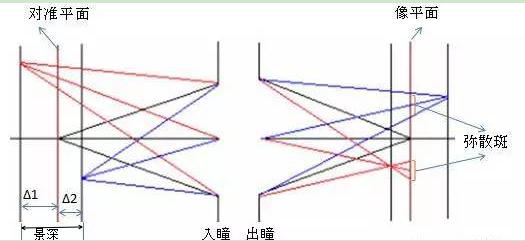 景深1
景深1景深可由下式計(jì)算:
隨著近年相機(jī)芯片像元尺寸的減小,彌散斑取0.04mm已遠(yuǎn)大于芯片的分辨能力。嚴(yán)格來(lái)說(shuō),不同像元尺寸的相機(jī),由于允許的彌散斑大小不同,同一個(gè)鏡頭的景深也有差異。但是習(xí)慣性的,機(jī)器視覺(jué)行業(yè)各鏡頭廠商仍以彌散斑直徑=0.04mm來(lái)計(jì)算景深。因此有經(jīng)驗(yàn)的工程師會(huì)發(fā)現(xiàn)鏡頭實(shí)際測(cè)試出的景深值<目錄上標(biāo)示出的景深理論值。
由上式可以看出,景深跟鏡頭有效Fno.成正比。因此對(duì)于光闌可調(diào)的鏡頭, 當(dāng)Fno.為1.4,即光闌開(kāi)口最大時(shí),景深最小。當(dāng)減小Fno.為8,即光闌開(kāi)口調(diào)小時(shí),景深增大。如下圖所示:
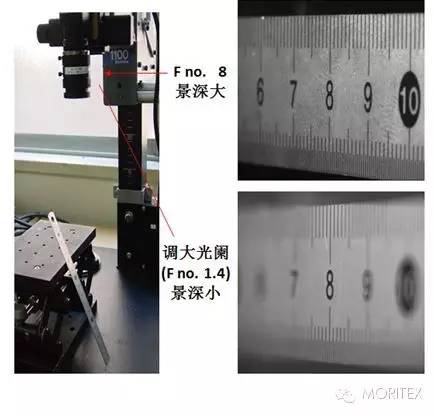
景深圖示2
另外,由上式還可看出,當(dāng)鏡頭Fno.相同時(shí),鏡頭放大倍率越小,景深越大。
3、什么工業(yè)鏡頭的分辨率?
工業(yè)鏡頭的分辨率指能被分辨開(kāi)來(lái)的兩個(gè)物點(diǎn)(或像點(diǎn))之間的最小距離,稱(chēng)為鏡頭的物方分辨率,記為Resolution(物)(或像方分辨率,記為Resolution(像)),單位為μm。制約工業(yè)鏡頭分辨率的原因是光的衍射現(xiàn)象,即衍射光斑(愛(ài)里斑)。
Resolution(物) = 0.61 x Wavelength/NA=1.22 x Wavelength x Fno.
Resolution(像) = 鏡頭放大倍率x Resolution(物)
解像力定義為:1mm內(nèi)的黑白線對(duì)數(shù), 記為Resolving power。單位為line/mm或lp/mm.
Resolving power = 1/ Resolution(像)
4、鏡頭分辨率跟相機(jī)分辨率如何才能匹配呢?
我們知道,物體是成像在相機(jī)芯片上的,物方的兩個(gè)點(diǎn),經(jīng)過(guò)鏡頭系統(tǒng)成像在相機(jī)芯片上的最小距離。假設(shè)使用0.5x的鏡頭拍攝22μm的物體,經(jīng)過(guò)鏡頭后變成11μm的像,如果相機(jī)的像元大小是2.2μm,那么要用11μm/2.2μm = 5個(gè)像素來(lái)顯示。單位距離的像要用5/11=1/2.2個(gè)像素來(lái)顯示。即相機(jī)圖像分辨率為1/2.2(單位pixel/μm),實(shí)際就是像元尺寸的倒數(shù)。從這個(gè)推導(dǎo)中我們得出像元尺寸越小,單位距離內(nèi)相機(jī)的分辨率越高。
鏡頭分辨率跟相機(jī)分辨率有效的匹配方法有兩種:
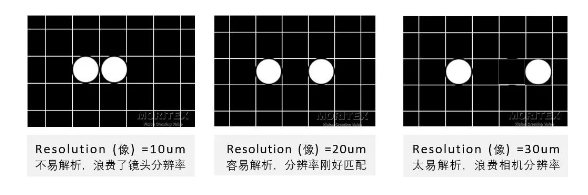
方法一:用物方分辨率乘以鏡頭放大倍率,得到像方分辨率;用算得的像方分辨率跟2倍的像元尺寸作比較:
1. 如果鏡頭像方分辨率 = 2倍的像元尺寸,說(shuō)明匹配剛剛好,誰(shuí)都不浪費(fèi)。
2. 如果鏡頭像方分辨率 > 2倍的像元尺寸,則浪費(fèi)了相機(jī)的分辨率。
3. 如果鏡頭像方分辨率 < 2倍的像元尺寸,則浪費(fèi)了鏡頭的分辨率。
舉個(gè)例子,相機(jī)的像元是10μm,那么:
方法二:鏡頭分辨率表示為每毫米線對(duì)數(shù)LP/mm。假設(shè)鏡頭的分辨率是n LP/mm,那么必須保證感光芯片上每毫米有2n個(gè)像素,才能充分發(fā)揮鏡頭的分辨能力。例如鏡頭分辨率是200LP/mm,用每毫米有400個(gè)像素的感光芯片才不會(huì)浪費(fèi)鏡頭的分辨率,計(jì)算下來(lái)像元尺寸大小為2.2μm,選用像元大小為2.2μm的相機(jī)合適。
5、鏡頭的物方分辨率與產(chǎn)品的精度也常被混淆。
精度指的是測(cè)量值與真實(shí)值之間的差異。如產(chǎn)品真實(shí)值為1.0mm, 要求精度為±5μm, 則說(shuō)明只要測(cè)量出的值在0.995mm~1.005mm間即為合格品。在機(jī)器視覺(jué)中通常根據(jù)客戶(hù)的FOV和精度要求算出相機(jī)的分辨率(如200萬(wàn)像素),相機(jī)一旦選定,則相機(jī)的像元尺寸(如4.65μm)也確定了。選鏡頭時(shí)即可根據(jù)上面的方法來(lái)選擇分辨率匹配此相機(jī)的鏡頭,從而保證系統(tǒng)的精度要求。
而如果客戶(hù)描述的是需要觀察到物方大小為5μm的目標(biāo),則要求鏡頭的物方分辨率必須<10μ
-
鏡頭
+關(guān)注
關(guān)注
2文章
514瀏覽量
25888 -
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
163文章
4473瀏覽量
121657 -
工業(yè)
+關(guān)注
關(guān)注
3文章
1963瀏覽量
47464 -
工業(yè)相機(jī)
+關(guān)注
關(guān)注
5文章
342瀏覽量
24158
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
工業(yè)視覺(jué)中變倍鏡頭的倍率選擇:并非越高就越優(yōu)

高光譜相機(jī)的空間分辨率,光譜范圍等參數(shù)我們要如何理解
高速連續(xù)掃描成像的TDI工業(yè)相機(jī)

高速、高分辨率、大面積成像應(yīng)用的理想選擇——Falcon4-CLHS工業(yè)相機(jī)

大視野與高分辨率難兼得,F(xiàn)A 鏡頭有何破局之法?

如何提高透鏡成像的分辨率
設(shè)計(jì)基于機(jī)器視覺(jué)的高分辨率雙遠(yuǎn)心物鏡

工業(yè)相機(jī)的幀率是不是越高越好

51camera 2024產(chǎn)品型錄-工業(yè)相機(jī)、工業(yè)鏡頭、光源
工業(yè)相機(jī)鏡頭參數(shù)詳解助力精準(zhǔn)選型

工業(yè)相機(jī)該選擇哪種圖像采集卡?

Moritex 5X 高分辨率遠(yuǎn)心鏡頭 助力晶圓檢測(cè)
工業(yè)鏡頭光學(xué)原理、優(yōu)勢(shì)及應(yīng)用

線掃工業(yè)鏡頭的參數(shù)和用途
圖像采集卡在工業(yè)環(huán)境中的應(yīng)用:高分辨率圖像的高速應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論