 RT-Thread框架下的SMP支持
RT-Thread框架下的SMP支持
前言
最近報名參加了恩智浦社區的 LPC55S69 開發板測評活動,由于其搭載的是一顆 Cortex-M33 Dual Core 的 CPU,而且有大佬已經支持了 RT-Thread 的 BSP,就考慮使其支持 RT-Thread 框架下的 SMP,最近就一直在研究 SMP,并在 Raspberry-Pico 上做了一些實驗。以下是一些我在學習過程中的心得體會,不對的地方歡迎大家指正交流~
SMP 簡介
SMP: 對稱多處理(Symmetrical Multi-Processing)簡稱 SMP,是指在一個計算機上匯集了一組處理器 (多 CPU), 各 CPU 之間共享內存子系統以及總線結構。雖然同時使用多個CPU,但是從管理的角度來看,它們的表現就像一臺單機一樣。系統將任務隊列對稱地分布于多個CPU之上,從而極大地提高了整個系統的數據處理能力。RT-Thread 自 v4.0.0 版本開始支持 SMP,在對稱多核上可以通過使能 RT_USING_SMP 來開啟。
系統上電后,各 CPU 的啟動流程如下圖所示:
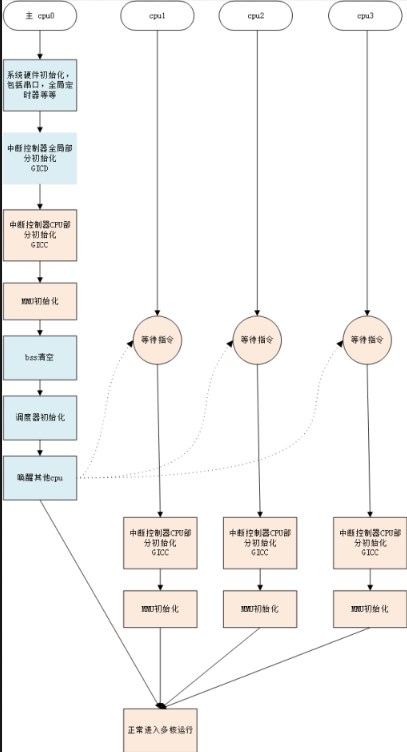
每個次級 CPU 自身硬件部分的初始化不能由 CPU0 完成,因為其自身硬件不能由其它 CPU 訪問。
關于 CPU 已經支持了 SMP 的平臺
RT-Thread 的 libcpu 中有一些芯片類型已經支持了 SMP 功能,例如 Cortex-A 系列。對于這樣的平臺,SMP 的移植工作就會簡單很多,我們只需要實現 rt_hw_secondary_cpu_up() ,secondary_cpu_c_start() ,rt_hw_secondary_cpu_idle_exec() 這三個函數即可,具體的移植介紹可以參考 RT-Thread 文檔中心SMP 介紹與移植
關于 CPU 還未支持 SMP 的平臺
RT-Thread 中還有一些 CPU 是沒有支持 SMP 的,例如 Cortex-M 系列的大部分 CPU,練手的 PICO 是 M0 ,準備開發的 LPC55S69 是 M33,都是還沒有支持 SMP 的。對于這樣的平臺移植 SMP 就會相對麻煩。除了 rt_hw_secondary_cpu_up() ,secondary_cpu_c_start() ,rt_hw_secondary_cpu_idle_exec() 這三個函數,我們還需要補充 SMP 所需要的底層支持,主要是中斷和調度部分,從而實現更加復雜的共享資源保護,以及線程間的通訊和調度。
推薦大家先去看看 RT-Thread 文檔中心的相關資料,以及這篇文章:[RT-Thread學習筆記] 中斷鎖、調度鎖與死鎖,最好再去看看 rt-threadsrc 目錄下的 scheduler.c 源碼。其中有許多 SMP 的相關實現。
CPU ID
scheduler.c 中已經有 SMP 的相關支持,但是會發現,還需要 CPU 的個數及其對應的 ID 等重要參數。所以我們首先要是實現的是 rt_hw_cpu_id() 這個函數。這個需要對應自己開發平臺的實際情況。
OS Tick
在 SMP 系統中,每個 CPU 維護自己獨立的 tick 值,用作任務運行計時以及時間片統計。除此之外,CPU0 還通過 tick 計數來更新系統時間,并提供系統定時器的功能,次級 CPU 不需要提供這些功能。這部分也是要針對使用的開發開發平臺進行配置。
處理器間中斷 IPI
處理器間中斷(Inter-Processor Interrupt)負責 CPU 之間的相互通訊及處理,針對不同開發的平臺,我們還需要實現以下函數:
/* 該函數用來向 CPU 位圖中表示的 CPU 集合發送指定編號的 IPI 信號 /
void rt_hw_ipi_send(int ipi_vector, unsigned int cpu_mask)
/ 函數為當前 CPU 設置指定編號 IPI 信號的處理函數 */
void rt_hw_ipi_handler_install(int ipi_vector, rt_isr_handler_t ipi_isr_handler)
調度與同步
臨界區保護是需要特別注意的。對于 SMP 通過關中斷的方式并不能阻止多個 CPU 對共享資源的并發訪問,需要通過自旋鎖機制進行保護(在次級 CPU 啟動中就需要使用)。我們就還需要實現以下幾個函數:
rt_hw_spin_lock_init() /* 初始化已分配的 spinlock 變量 /
rt_hw_spin_lock() / 獲取 spinlock,忙等待直到獲取成功 /
rt_hw_spin_unlock() / 釋放 spinlock */
需要定義自旋鎖:
typedef union {
unsigned long slock;
struct __arch_tickets {
unsigned short owner;
unsigned short next;
} tickets;
} rt_hw_spinlock_t;
不使用 SMP 的時候,在進行調度等需要臨界資源保護的情況下,是通過 rt_hw_interrupt_disable/enable 來屏蔽中斷進行保護,但是在 SMP 中,對 rt_hw_interrupt_disable/enable 進行了替換,從而保證對共享資源訪問的互斥:
/* 在 rthw.h 中 */
#ifdef RT_USING_SMP
#define rt_hw_interrupt_disable rt_hw_local_irq_disable
#define rt_hw_interrupt_enable rt_hw_local_irq_enable
#endif
因為 SMP 使用了多核,調度和同步的情況相較于單個處理器更加復雜和重要,這部分是移植的重點。需要針對開發平臺的不同,對以下函數進行重寫(對于 Cortex-M 內核,需要注意輔助上下文切換的 PendSV 也是一種中斷):
/* 實現從當前線程切換到目標線程,在 Cortex-M 內核里 rt_hw_context_switch() 和 rt_hw_context_switch_interrupt() 功能一致 /
rt_hw_context_switch_interrupt:
rt_hw_context_switch:
/ 實現沒有來源線程切換到目標線程 /
rt_hw_context_switch_to:
/ PendSV 中斷處理函數,在 Cortex-M 內核里 PendSV 輔助完成上下文切換 */
PendSV_Handler:
這部分需要在 context_gcc.S 文件中實現。
移植 SMP 的重點是調度與同步,大家在移植之前,最好對 RT-Thread 的調度流程和中斷機制有一定的學習和理解,這部分可以參考 RT-Thread 文檔中心,最好能配合著理解源碼的實現。我對 RT-Thread 框架下的 SMP 目前的理解就是以上這些,歡迎大家交流討論。
-
處理器
+關注
關注
68文章
19825瀏覽量
233763 -
SMP
+關注
關注
0文章
78瀏覽量
20185 -
定時器
+關注
關注
23文章
3289瀏覽量
117358 -
Cortex-M
+關注
關注
2文章
230瀏覽量
30256 -
RT-Thread
+關注
關注
32文章
1372瀏覽量
41563
發布評論請先 登錄
基于RT-Thread的RoboMaster電控框架設計
RT-Thread SMP和AMP初體驗簡介
RT-Thread框架下的SMP支持
RT-Thread編程指南
2022 RT-Thread全球技術大會:螢石EZIOT SDK對RT-Thread的支持
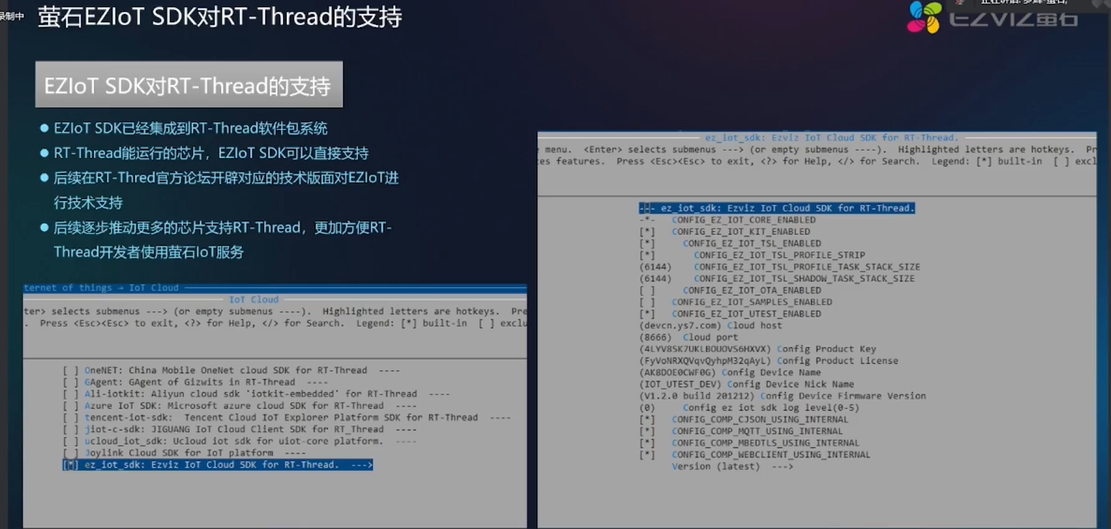
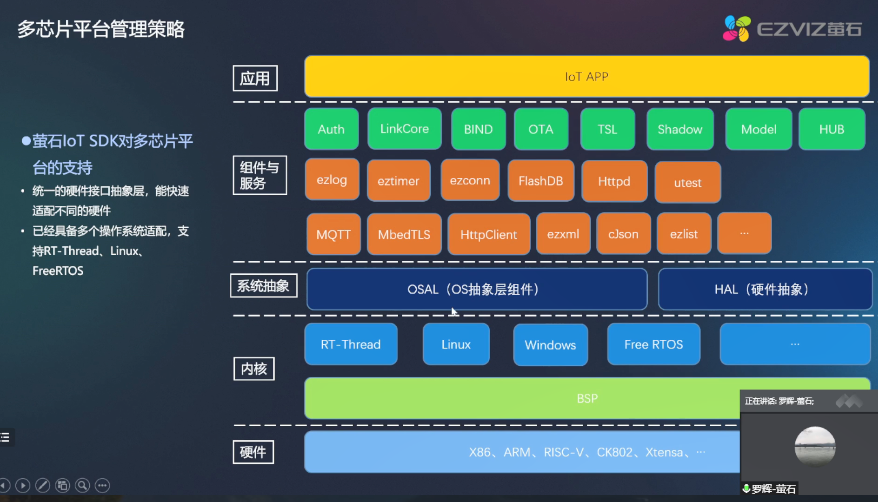
RT-Thread全球技術大會:螢石EZloT SDK對RT-Thread的支持以及多芯片平臺管理策略
RT-Thread全球技術大會:RT-Thread上的單元測試框架與運行測試用例

淺析RT-Thread設備驅動框架
基于 RT-Thread 的 RoboMaster 電控框架(一)
基于RT-Thread的RoboMaster電控框架(二)
基于rt-thread的socket通信設計






 工商網監
工商網監
評論