") 機器人阻抗控制有幾種方法
機器人阻抗控制有幾種方法

在工業(yè)機器人中,阻抗控制是一種非常重要的控制方法,主要用于控制機器人的力和位。通過調(diào)整阻抗,機器人可以更好地適應(yīng)不同的操作環(huán)境和任務(wù)需求。
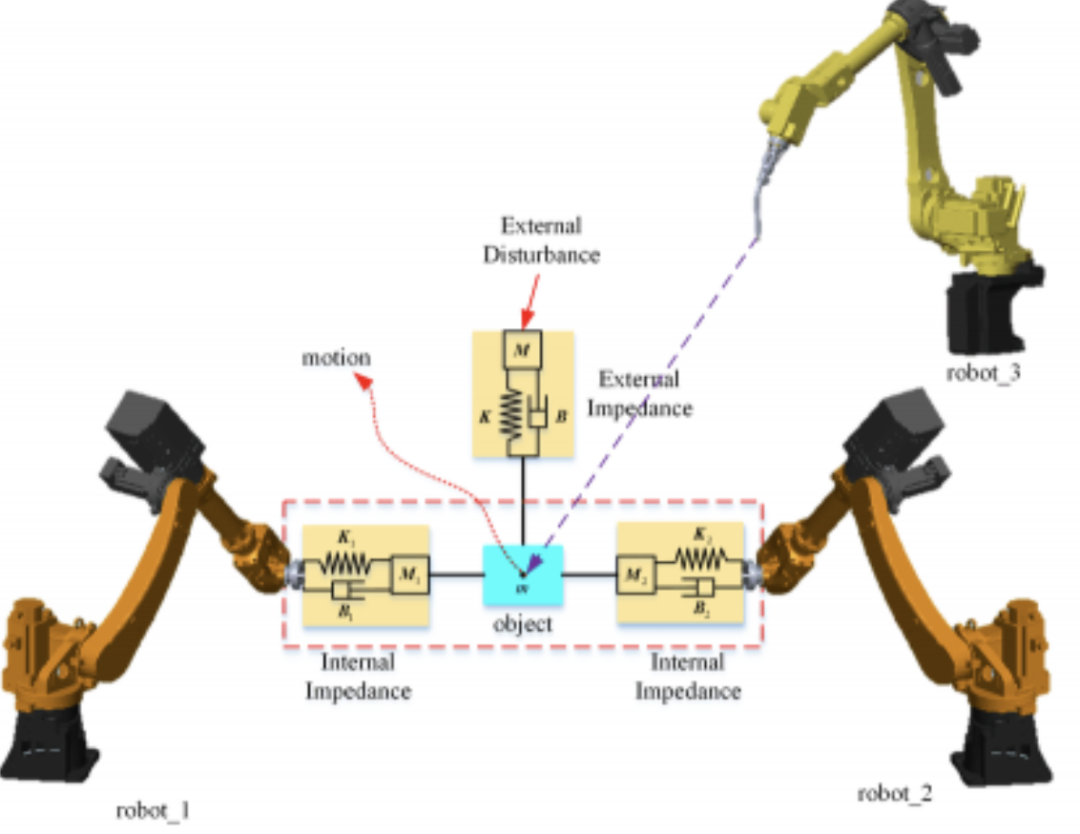
阻抗控制的基本思路是:建立一個期望的機器人位置和接觸力的動態(tài)響應(yīng)關(guān)系,通過改變阻抗,可以調(diào)節(jié)機器人與外界的動態(tài)作用。
一般來說,機器人阻抗控制主要分為兩種方法:基于位置的阻抗控制和基于力的阻抗控制。
1.基于位置的阻抗控制:讓機器人電機在位置模式下工作,通過發(fā)送目標(biāo)位置和速度實現(xiàn)阻抗特性。這種控制方式主要是為了控制機器人的位置精度和運動軌跡。
2.基于力的阻抗控制:需要讓機器人的電機處于力矩模式工作,需要考慮機器人的動力學(xué)模型,直接計算出需要的力矩給驅(qū)動器。這種控制方式主要是為了控制機器人與環(huán)境之間的作用力和反作用力,從而實現(xiàn)更好的順應(yīng)性。
在基于力的阻抗控制中,需要使用到機器人力傳感器來測量機器人與環(huán)境之間的作用力。
通過這種方式,機器人可以更好地感知其操作環(huán)境,并根據(jù)實際需要對力和位置進行更為精準(zhǔn)的控制。
力覺傳感器在機器人的主動柔順控制中起著至關(guān)重要的作用,它們是實現(xiàn)機器人力控制性能必不可少的部件。六維力傳感器是目前在機器人力控解決方案中應(yīng)用最為廣泛的力覺傳感器。
六維力傳感器能夠同時提供更全面的力信息。這些信息對于實現(xiàn)機器人的精確操作和適應(yīng)各種不同的任務(wù)場景至關(guān)重要。
相比之下,電流環(huán)在響應(yīng)精度和速度上均低于力傳感器,因此其適用場景相對有限。
盡管電流環(huán)的成本可能較低,但在需要更高精度和更快響應(yīng)速度的應(yīng)用中,力傳感器通常是更好的選擇。
-
傳感器
+關(guān)注
關(guān)注
2565文章
52916瀏覽量
766633 -
機器人
+關(guān)注
關(guān)注
213文章
29697瀏覽量
212604 -
工業(yè)
+關(guān)注
關(guān)注
3文章
2063瀏覽量
47906
發(fā)布評論請先 登錄
機器人視覺——機器人的“眼睛”
【機器人在線】一種新型串并聯(lián)六自由度噴涂機器人誤差建模引言
機器人的主要技術(shù)參數(shù)
先進機器人控制
工業(yè)機器人的工作原理
給機器人以平衡感的各種方法測量傾角的傳感器
機器人的定義是什么?工業(yè)機器人的應(yīng)用有哪些?
機器人是什么?
常用的機器人編程方法有哪些
阻抗控制的特點及阻抗控制的實現(xiàn)方法
力控機器人控制方法的框架及其性能分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論