 機器人阻抗控制實現規律
機器人阻抗控制實現規律

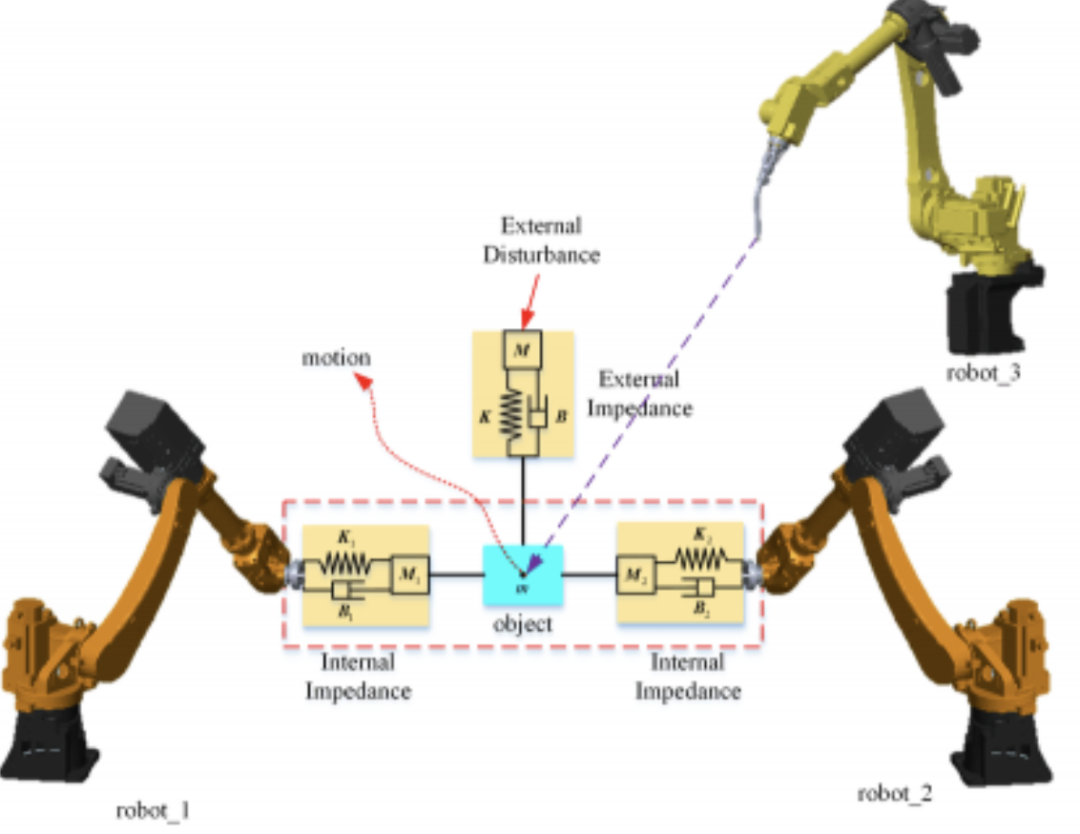
從力與運動的角度,阻抗控制實現規律可以總結如下:
1. 力與位移關系:阻抗控制通過建立力與位移之間的關系來實現控制。
這種關系可以使用彈簧-阻尼系統來描述,其中彈簧表示機器人的剛度,阻尼表示機器人的阻尼特性。根據該關系,當外部施加力對機器人產生作用時,機器人的位移會相應改變。
2. 阻抗參數調節:阻抗控制通過調節阻抗參數來控制機器人對外部力的響應。
阻抗參數包括剛度、阻尼和質量等,通過調節這些參數的值,可以實現對外部力的不同響應特性。例如,增加剛度可以使機器人對外部力更加剛性地響應,而增加阻尼可以使機器人對外部力的消散更快。
3. 力控制模式:阻抗控制可以實現力控制模式。在力控制模式下,機器人會根據外部施加的力來調整自身的位移,以實現對外部力的精確控制。這種控制模式廣泛應用于力導引、物體抓握和與人類操作者的協作等任務中。
4. 運動控制模式:除了力控制模式,阻抗控制還可以實現運動控制模式。在運動控制模式下,機器人會根據期望的位移來調整自身的力響應,以實現對運動的控制。
這種控制模式在需要控制機器人的運動軌跡或位置時非常有用。
5. 力與位移反饋:阻抗控制通常使用力與位移的反饋信息來實現控制。
通過實時測量外部施加的力和機器人的位移,控制系統可以根據設定的阻抗參數和控制策略來計算出合適的控制指令,以調整機器人的力響應和位移。
總體而言,阻抗控制通過建立力與位移之間的關系,調節阻抗參數以及使用力與位移反饋來實現對外部力和運動的控制。這種控制方法在機器人操作中具有廣泛的應用,能夠實現精準的力控制和與環境的交互,為實現柔性、精準和協作性的機器人操作提供了重要的手段。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29709瀏覽量
212699 -
測量
+關注
關注
10文章
5235瀏覽量
113418 -
控制模式
+關注
關注
0文章
25瀏覽量
8467
發布評論請先 登錄
相關推薦
熱點推薦
《機器人設計與實現》——低成本DIY機器人,一本機器人制作的經典入門書
基礎、機器人本體、電子控制設備、傳感器與導航和機器人電源系統等。《機器人設計與實現》是按照搭積木的方法指導
發表于 08-01 18:21
什么是工業機器人
` 本帖最后由 大連云港 于 2015-1-19 11:02 編輯
工業機器人是面向工業領域的多關節機械手或多自由度的機器人。工業機器人是自動執行工作的機器裝置,是靠自身動力和
發表于 01-19 10:58
機器人從事件提取規律或道理行得通嗎?
了。機器人:摔跤了嗎?我:沒摔。機器人:與前面矛盾了。你應該摔跤。我:……人工智能可以不斷地從具體事例中歸納出道理或對規律的認識,道理積累多了,就可以形成一套系統的規則。大家看這樣的思路有可行性嗎?
發表于 03-09 14:29
辰漢-如何實現服務機器人的運算與控制
的能力。紅外模塊可以實現對一些外部電器的操控,電池和電池管理模塊給整個機器人的運轉提供能量。辰漢-硬件結構是實現服務機器人運算和控制的基礎,
發表于 06-09 17:18
如何實現移動機器人的設計?
,導航技術,計算機技術,人工智能等多個領域,因而對移動機器人的控制部分提出很高的要求,特別是視覺傳感器的出現,要求控制系統不僅存儲量大,而且處理速度快等。以往基于PLC和單片機控制的移
發表于 11-23 15:08
【四足機器人】SOLO技術詳解--(1)介紹(2)平臺和機器人概述【翻譯】精選資料分享
摘要我們提出了一個新的開源機器人的腿部力矩控制系統,這個系統的特點是低成本及結構簡單。這個系統由高力矩無刷直流舵機和適合阻抗調節和力矩控制的低傳動結構組成。同時我們也設計了一個適應沖撞
發表于 09-13 06:33





 工商網監
工商網監
評論