") 如何使用示波器分析電機(jī)系統(tǒng)的DQ0?
如何使用示波器分析電機(jī)系統(tǒng)的DQ0?
直接正交零點(diǎn)(dq0)參數(shù)是磁場(chǎng)定向控制算法中的重要變量。這些重要參數(shù)通常是控制系統(tǒng)中使用的,但是在設(shè)計(jì)優(yōu)化和調(diào)試過程中,這些參數(shù)需要實(shí)時(shí)測(cè)量,同時(shí)需要將這些參數(shù)值與測(cè)量值(如扭矩輸出)關(guān)聯(lián)起來。
以前,電機(jī)驅(qū)動(dòng)器和逆變器設(shè)計(jì)者通常使用自定義的軟件和硬件,去測(cè)量這些參數(shù),把dq0參數(shù)與扭矩相關(guān)聯(lián)。這種自定義方法極其復(fù)雜,且價(jià)格昂貴。
泰克提出了一種替代方法,可以測(cè)量dq0分量,以及旋轉(zhuǎn)傳感器和無傳感器系統(tǒng)的合成驅(qū)動(dòng)矢量。該技術(shù)是逆變器、電機(jī)和驅(qū)動(dòng)器分析軟件包(選件 IMDA-DQO),在5系示波器或6系示波器上可以選加配置。它采用信號(hào)處理技術(shù),根據(jù)驅(qū)動(dòng)系統(tǒng)輸出的實(shí)時(shí)測(cè)量結(jié)果,計(jì)算d、q和0控制參數(shù)。這樣,給定一個(gè)特定電氣輸入,設(shè)計(jì)者就能直觀看到扭矩。
矢量驅(qū)動(dòng)/磁場(chǎng)定向控制
用于同步電機(jī)和交流感應(yīng)電機(jī)的先進(jìn)驅(qū)動(dòng)器通常采用矢量驅(qū)動(dòng)技術(shù)。與簡(jiǎn)單的標(biāo)量驅(qū)動(dòng)相比,矢量驅(qū)動(dòng)能提供更平穩(wěn)的運(yùn)行、更快的加速度和更出色的轉(zhuǎn)矩控制。矢量驅(qū)動(dòng)采用磁場(chǎng)定向控制(FOC),雖然用途廣泛、效率高,但也比標(biāo)量驅(qū)動(dòng)復(fù)雜得多。圖1顯示了面向磁場(chǎng)的控制系統(tǒng)產(chǎn)生的PWM輸出波形。
圖2是磁場(chǎng)定向控制系統(tǒng)的簡(jiǎn)化框圖。控制系統(tǒng)中使用克拉克(Clarke)和帕克(Park)變換,將施加到電機(jī)上的三相電壓轉(zhuǎn)換為正交的D和Q矢量。這些簡(jiǎn)化矢量可以很容易地進(jìn)行縮放和整合,以維持所需的速度和扭矩。接下來,反向變換可用于在逆變器內(nèi)創(chuàng)建脈沖寬度調(diào)制的驅(qū)動(dòng)信號(hào)。
需要注意的是,控制系統(tǒng)還要測(cè)量轉(zhuǎn)子的位置。這可以通過霍爾傳感器、旋轉(zhuǎn)變壓器或正交編碼器接口 (QEI)等傳感器來實(shí)現(xiàn)。
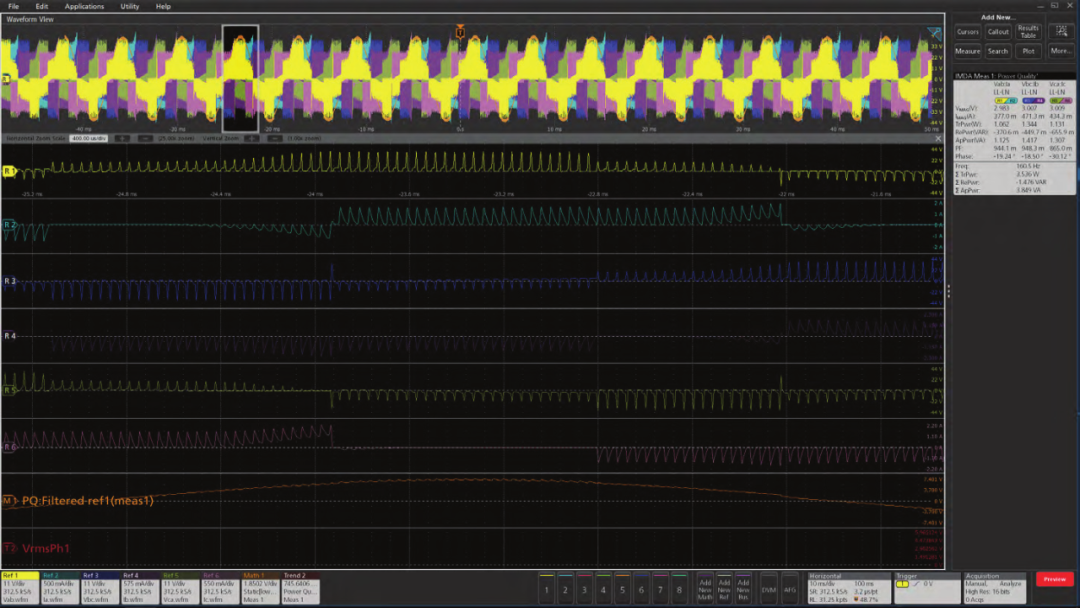
圖1. 矢量驅(qū)動(dòng)/磁場(chǎng)定向控制使用復(fù)雜的PWM波形
同樣地,在控制系統(tǒng)中也可使用無傳感器系統(tǒng),利用電機(jī)的反電動(dòng)勢(shì)來確定轉(zhuǎn)子位置。
如圖1所示,D值和Q值通常位于數(shù)字信號(hào)處理模塊(如FPGA)的內(nèi)部,可能無法直接測(cè)量。IMDA-DQO軟件可根據(jù)采樣的三相輸出電壓或電流以及轉(zhuǎn)子的角度位置,來顯示這些關(guān)鍵參數(shù)。這樣,工程師就能看到控制系統(tǒng)調(diào)整的效果,并快速、輕松地查看信號(hào)關(guān)系。
DQ0測(cè)量原理
如上所述,在示波器上運(yùn)行的IMDA-DQ0軟件,使用采樣電壓或電流以及角度位置信息來實(shí)時(shí)計(jì)算d、q和0。本節(jié)將解釋這些測(cè)量背后的原理。
三相交流和直流電機(jī)可通過旋轉(zhuǎn)電壓和電流方程建模。等式1至3表示VR,VS和VT的三相電壓函數(shù)。
VG代表相應(yīng)增益,‘w’是2*π*f,這里的‘f’指的是標(biāo)稱頻率。
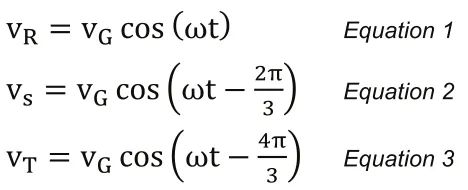
在正確連接的情況下,示波器可以測(cè)量整個(gè)過程中的任意瞬時(shí)電壓值。
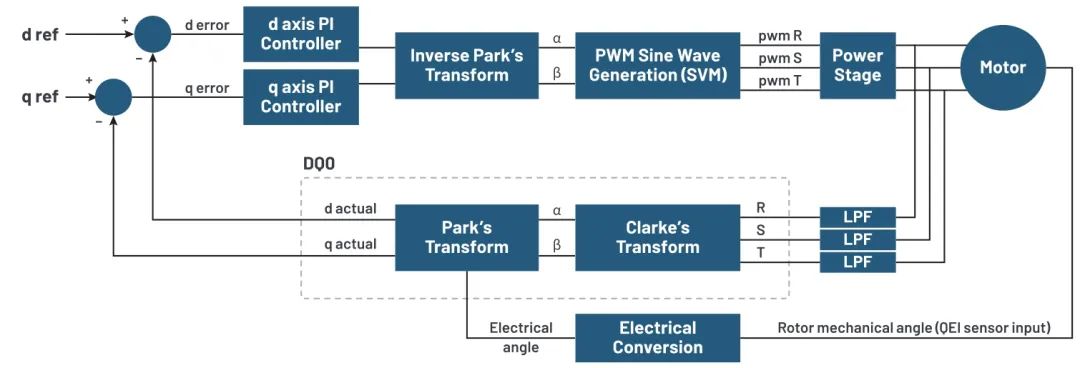
圖2. 磁場(chǎng)定向控制系統(tǒng)簡(jiǎn)化框圖,顯示如何使用d和q來簡(jiǎn)化三相PWM電機(jī)驅(qū)動(dòng)中的反饋
采集通常約為10個(gè)完整周期,具體取決于采樣率和可用記錄長(zhǎng)度。低通濾波器可用于減輕高頻失真、電壓尖峰、開關(guān)噪聲和電磁干擾(EMI)的影響。
示波器還可以利用霍爾效應(yīng)傳感器、QEI或旋轉(zhuǎn)變壓器的輸出,去測(cè)量轉(zhuǎn)子的角位置。
給定電壓或電流矢量以及轉(zhuǎn)子角度后,就能求得d、q和0。要將電壓或電流矢量按d軸排列,可應(yīng)用矩陣方程(方程4)將三相矢量轉(zhuǎn)換為dq0矢量。

■R、S和T可以代表IR、S、T(t) 或IR,S,T(t) orVRN,SN,TN(t)。
■t是采樣時(shí)間,從0到采集時(shí)間。
■θ是由電機(jī)輸出端的霍爾效應(yīng)傳感器、正交編碼器接口(QEI)或旋轉(zhuǎn)變壓器確定的電氣角度。在無傳感器系統(tǒng)中,可以使用相對(duì)于基準(zhǔn)電壓或電流的偏移角度。
■生成的DQO是旋轉(zhuǎn)參照幀,它代表了系統(tǒng)相對(duì)于轉(zhuǎn)子位置的情況。
進(jìn)行示波器測(cè)量
在MSO5B系列和MSO6B系列的示波器中,逆變器、電機(jī)和驅(qū)動(dòng)器分析軟件包的關(guān)鍵電氣測(cè)量被歸入電氣分析測(cè)量類別。電氣分析測(cè)量類別中有泰克專利的直接正交零點(diǎn)(DQO)測(cè)量。
圖3顯示了DQO測(cè)量的源設(shè)置示例。除了選擇源和連線外,還可以指定一個(gè)低通濾波器,該濾波器可以應(yīng)用于所有源的設(shè)置,也可以僅應(yīng)用于邊沿限定。如上所述,這對(duì)于減少EMI和開關(guān)噪聲造成的噪聲非常有用。
本例中使用的是正交編碼接口(QEI)。對(duì)于無傳感器系統(tǒng),可以使用帶偏移角和濾波電信號(hào)的反向電動(dòng)勢(shì)法。
在磁場(chǎng)定向控制中,目標(biāo)是控制D值和Q值來獲取想要的扭矩。通過獨(dú)立控制D和Q,可以實(shí)現(xiàn)最大轉(zhuǎn)矩電流比 (MTPA)。圖4顯示了示波器上的相量圖,D和Q矢量疊加在三相電壓矢量上。
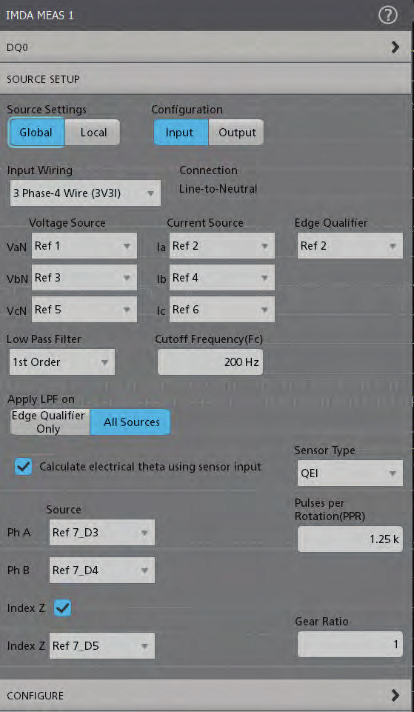
圖3. 在使用正交編碼接口(QEI)的系統(tǒng)上配置示波器進(jìn)行DQO測(cè)量
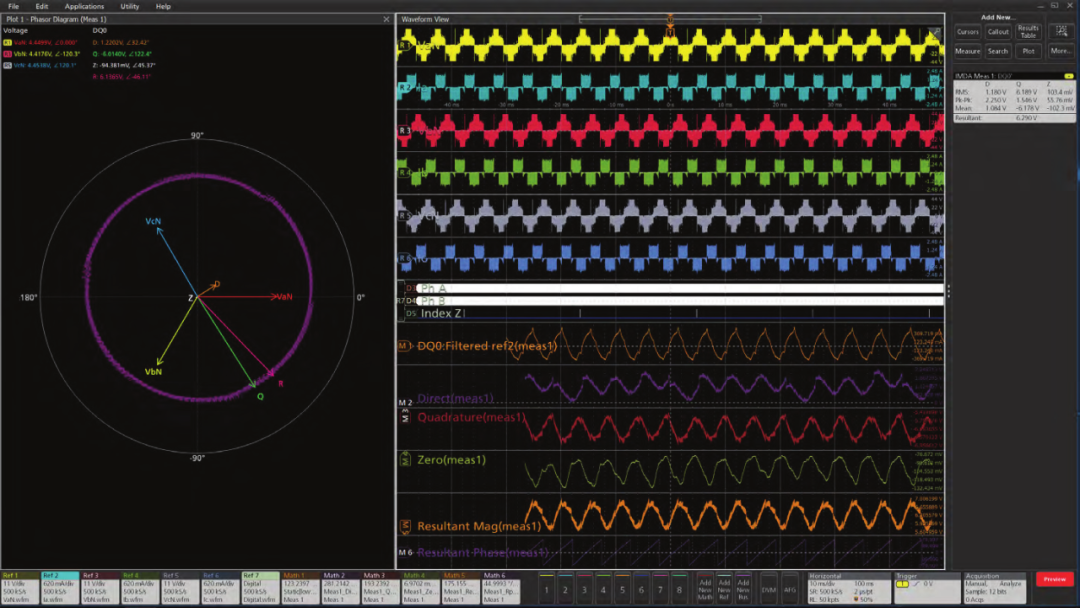
圖4. DQ0相位圖顯示測(cè)量結(jié)果矢量 (R),電機(jī)速度和方向反饋由正交編碼傳感器提供
在任意時(shí)間點(diǎn),d軸都沿著轉(zhuǎn)子的南北軸,代表轉(zhuǎn)子磁通方向。q軸超前d軸90度。D代表轉(zhuǎn)子磁通軸,Q代表轉(zhuǎn)矩軸。由于來自定子和轉(zhuǎn)子的垂直磁通會(huì)產(chǎn)生轉(zhuǎn)矩,因此最好讓定子或轉(zhuǎn)子的磁通相對(duì)于彼此成90度角。也就是說,定子磁通或定子電流最好沿著q軸。
一般來講,D和Q被視為恒定值,而采用這種方法后,我們可以通過時(shí)域數(shù)學(xué)波形(如圖4所示) 直觀地看到D和Q上的紋波。這是衡量輸入穩(wěn)定性的另一個(gè)指標(biāo)。
除D和Q外,分析軟件還顯示了結(jié)果矢量(R)。R的計(jì)算方法是在D和Q的每個(gè)采樣點(diǎn)計(jì)算D和Q向量的斜邊矢量。在這種情況下,斜邊矢量由QEI的脈沖(Z)決定。增量角由QEI根據(jù)編碼器的每轉(zhuǎn)脈沖數(shù)(PPR)計(jì)算得出。通過觀察結(jié)果矢量(R)旋轉(zhuǎn),我們可以看到控制系統(tǒng)是否在平穩(wěn)地驅(qū)動(dòng)電機(jī)。我們還可以觀察換向的次數(shù) -- 注意圖4中R向量圖中的六個(gè)失真點(diǎn),對(duì)應(yīng)六個(gè)換向步驟。
圖4右下方顯示了D、Q、0和R的時(shí)間圖。使用示波器的光標(biāo)功能,可以同時(shí)在時(shí)間上看到測(cè)量值,以及相量圖上的旋轉(zhuǎn)幀。
|結(jié)論|
D、Q、0和R是矢量電機(jī)驅(qū)動(dòng)中常見的磁場(chǎng)定向控制系統(tǒng)的關(guān)鍵變量,但它們很難被實(shí)時(shí)觀測(cè)到。本文介紹的新技術(shù)可在示波器上顯示這些變量,讓工程師方便查看,并且將這些關(guān)鍵變量與電氣和機(jī)械參數(shù)關(guān)聯(lián)起來。這為驅(qū)動(dòng)系統(tǒng)或逆變器的調(diào)試和優(yōu)化提供了寶貴的方法。
-
示波器
+關(guān)注
關(guān)注
113文章
6606瀏覽量
188492 -
電機(jī)系統(tǒng)
+關(guān)注
關(guān)注
0文章
76瀏覽量
11244 -
泰克科技
+關(guān)注
關(guān)注
2文章
199瀏覽量
19908
原文標(biāo)題:白皮書 | 如何使用示波器分析電機(jī)系統(tǒng)的DQ0?
文章出處:【微信號(hào):泰克科技,微信公眾號(hào):泰克科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
雙電機(jī)驅(qū)動(dòng)系統(tǒng)消隙技術(shù)分析
升降速曲線對(duì)直線電機(jī)系統(tǒng)性能影響的研究
嵌入式直驅(qū)力矩電機(jī)設(shè)計(jì)及其系統(tǒng)仿真分析
逆變器供電雙三相異步電機(jī)系統(tǒng)的MATALB仿真
普源示波器用FFT功能快速診斷無人機(jī)電機(jī)驅(qū)動(dòng)故障
CYUSB3014從機(jī)FIFO接口圖顯示支持DQ[31:0],但表格僅表明支持DQ[15:0],哪一個(gè)是正確的?
電機(jī)系統(tǒng)節(jié)能關(guān)鍵技術(shù)及展望
MATLAB電機(jī)仿真精華50例【干貨】
是德示波器功率分析功能的應(yīng)用

3月13日在線研討會(huì) | 主驅(qū)電機(jī)系統(tǒng)的功能安全設(shè)計(jì)
晶閘管電動(dòng)機(jī)系統(tǒng)與發(fā)電機(jī)系統(tǒng)比較
電機(jī)系統(tǒng)中寬共模差分分流放大器的優(yōu)勢(shì)

使用自動(dòng)扭矩降低步進(jìn)電機(jī)系統(tǒng)的功率損耗
Aigtek功率放大器如何驅(qū)動(dòng)MEMS微電機(jī)系統(tǒng)
動(dòng)圖展示兩大電機(jī)系統(tǒng)的運(yùn)行順序





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論