") 編碼器常用測速方法
編碼器常用測速方法
2.1 倍頻技術(shù)
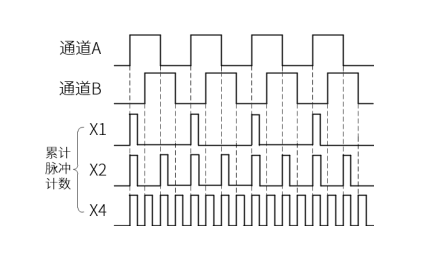
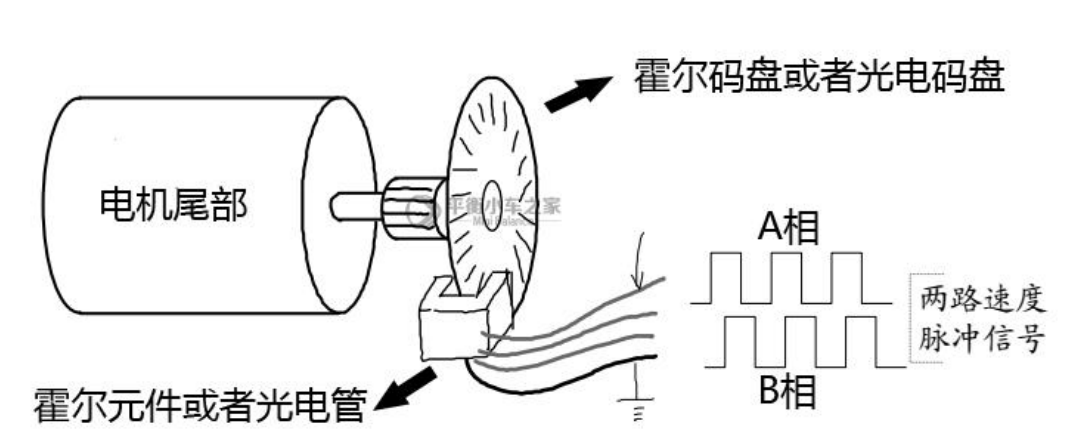
編碼器會輸出兩路方波信號,如果只在通道A的上升沿計數(shù),那就是1倍頻;通道A的上升、下降沿計數(shù),那就是2倍頻;如果在通道A、B的上升、下降沿計數(shù),那就是4倍頻。
使用倍頻可以最大程度地利用兩路信號,提高測速的靈敏度。
下面說的三種測速方法只是在軟件計算上的區(qū)別,硬件上是沒有改變的
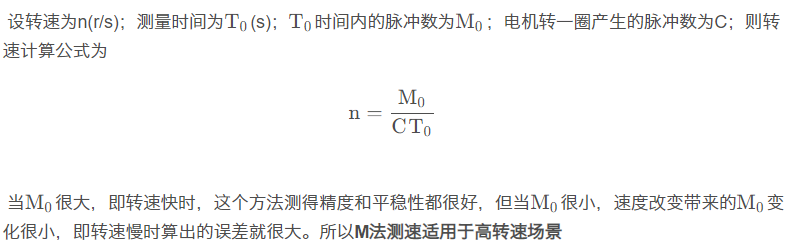
2.1 M法測速(周期測量法)
簡單地說就是根據(jù)單位時間一共有多少個脈沖來計算轉(zhuǎn)速。
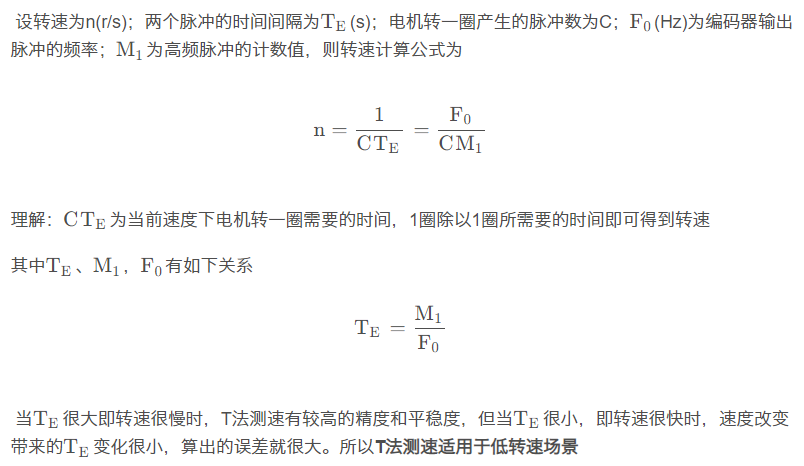
2.2 T法測速(頻率測量法)
T法測速是這樣操作的:是指先建立一個頻率已知且固定的高頻脈沖,當編碼器讀到一個信號,開始對高頻脈沖進行計數(shù),編碼器第二個信號到來后,停止計數(shù)。
根據(jù)對高頻脈沖計數(shù)的次數(shù)、高頻脈沖頻率和電機轉(zhuǎn)一圈編碼器產(chǎn)生的脈沖數(shù)進行速度計算。
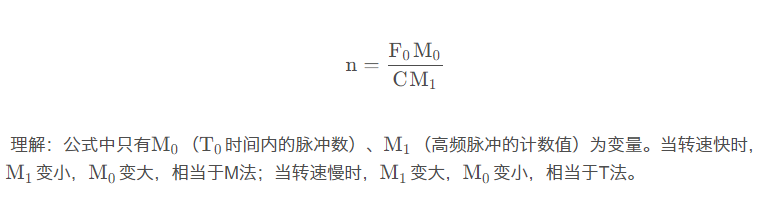
2.3 M/T法測速
M/T法綜合了M法和T法的優(yōu)勢,計算公式如下。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
編碼器
+關(guān)注
關(guān)注
45文章
3783瀏覽量
137425 -
倍頻
+關(guān)注
關(guān)注
1文章
25瀏覽量
18545 -
測速
+關(guān)注
關(guān)注
0文章
40瀏覽量
14382
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
STM對正交編碼器測速的程序--輸入捕獲測速
最近在做一個用正交編碼器對電機進行測速的任務,在網(wǎng)上查了使用STM正交編碼模塊對其進行測速,但是由于編碼器脈沖數(shù)較少,兩次
發(fā)表于 08-03 10:26
一種基于光電編碼器的高精度測速和測加速度方法
在比較常用的基于光電編碼器的測速、測加速度方法的優(yōu)缺點的基礎上,本文提出了一種新的基于光電編碼器的高精度
發(fā)表于 08-05 09:35
?131次下載
常用光電編碼器有哪些,光電編碼器原理分析
編碼器是意指"數(shù)字化的量尺"借著編碼器的出現(xiàn),使量測工具得以結(jié)合"光""電"和邏輯來運算,極快的量測速度,將量測工作推向新的里程碑。
發(fā)表于 08-02 17:13
?5575次閱讀
霍爾編碼器原理及測速--PID—arduino
標題本人目前是一個大一菜鳥,零基礎學的編碼器方面,希望我的經(jīng)驗對你有些幫助。分享一下霍爾編碼器電機的使用與測速,我用的是25GA-310直流減速電機帶霍爾傳感器。先來看一下最基本的接線
發(fā)表于 11-11 11:36
?262次下載

平衡小車—編碼器使用教程與測速原理
文章目錄1.編碼器概述2.編碼器原理3.編碼器接線說明4.編碼器軟件四倍頻技術(shù)5.單片機如何采集編碼器數(shù)據(jù)6.獲取方式來自平衡小車之家,與大
發(fā)表于 11-22 19:51
?57次下載
傳統(tǒng)型編碼器測速方案
傳統(tǒng)型編碼器測速方案編碼器,經(jīng)常被用來測量速度或者顯示電機位置,大致分為絕對值式編碼器和增量式編碼器,顧名思義,相對應的是產(chǎn)生增量或者絕對信
發(fā)表于 12-31 18:53
?12次下載
ROS移動機器人中常用的編碼器
前兩篇文章介紹了電機基礎知識和直流有刷電機驅(qū)動電路。這篇文章介紹ROS移動機器人中電機測速傳感器----編碼器。ROS移動機器人中常用到的編碼器有兩種分別為光電





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論