") 機(jī)器人時(shí)間縮放法原理
機(jī)器人時(shí)間縮放法原理

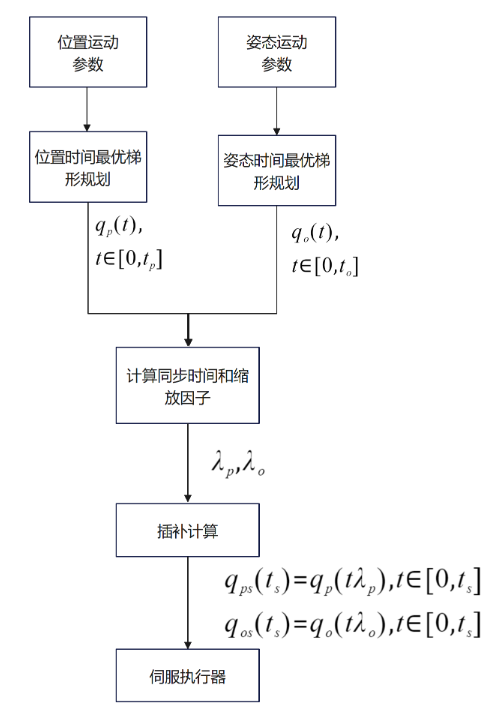
時(shí)間縮放法的初衷是用于修改軌跡,避免軌跡違反系統(tǒng)飽和約束限制的,我們先闡述其原理,然后將其用于實(shí)現(xiàn)速度曲線時(shí)間同步。
在一些應(yīng)用場(chǎng)景中需要考慮驅(qū)動(dòng)系統(tǒng)的飽和限制約束,為了保證規(guī)劃的期望軌跡不違反此類飽和限制,必須對(duì)原始的軌跡進(jìn)行修改。
由于那些運(yùn)動(dòng)速度、加速度和力矩超過(guò)允許范圍的運(yùn)動(dòng)軌跡在實(shí)際中無(wú)法執(zhí)行,因此此類運(yùn)動(dòng)軌跡在實(shí)際工程中應(yīng)予以避免。實(shí)際中可以將飽和區(qū)分為如下兩類。
(1)運(yùn)動(dòng)學(xué)飽和:規(guī)劃后軌跡的速度或加速度超過(guò)了驅(qū)動(dòng)系統(tǒng)所能實(shí)現(xiàn)的臨界速度或臨界加速度。
(2)動(dòng)力學(xué)飽和:此列飽和發(fā)生于驅(qū)動(dòng)系統(tǒng)所需的驅(qū)動(dòng)力矩(超過(guò)驅(qū)動(dòng)系統(tǒng)所能提供的臨界力矩)不可行的情形。
特別地,由于多機(jī)械系統(tǒng)動(dòng)力學(xué)的非線性耦合性,動(dòng)力學(xué)飽和現(xiàn)象往往出現(xiàn)于此類多軸機(jī)械系統(tǒng)(如工業(yè)機(jī)器人)中。
如果在軌跡規(guī)劃階段并未提前考慮上述運(yùn)動(dòng)學(xué)飽和及動(dòng)力學(xué)飽和限制,那么有必要在系統(tǒng)跟蹤運(yùn)動(dòng)軌跡之前驗(yàn)證運(yùn)動(dòng)軌跡的可行性,并采取必要措施(如增加軌跡的時(shí)間長(zhǎng)度)來(lái)防止違反上述飽和限制。
首先,給定一條軌跡:
q=q(t)
接下來(lái)引入一個(gè)新的與時(shí)間t有關(guān)的時(shí)間變量′t′ 可使得上面軌跡變快或變慢,或者更一般地,可以修改軌跡的速度和加速度等,其中 t和
′t′之間具有如下嚴(yán)格的函數(shù)關(guān)系:
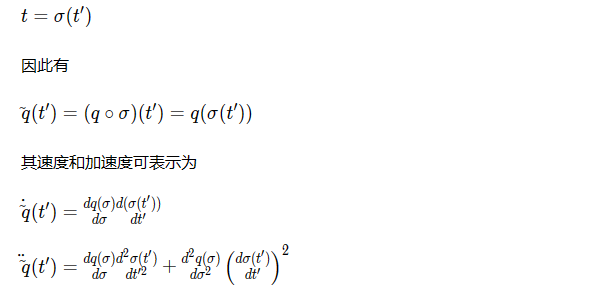

為了簡(jiǎn)便起見(jiàn),上述關(guān)系可以重新寫(xiě)成如下形式:


-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29600瀏覽量
212121 -
軌跡
+關(guān)注
關(guān)注
0文章
46瀏覽量
9442 -
機(jī)械系統(tǒng)
+關(guān)注
關(guān)注
0文章
64瀏覽量
9848
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)器人時(shí)代將來(lái)臨,誰(shuí)的飯碗已“告急”?
機(jī)器人時(shí)代到來(lái)臨——操控人才在何方?
機(jī)器人與未來(lái)
華碩Zenbo,機(jī)器人時(shí)代來(lái)了?
身處“機(jī)器人時(shí)代”,我們?cè)撊绾蜗嗵帲?/a>
選購(gòu)工業(yè)機(jī)器人要了解哪些技術(shù)參數(shù)?
已開(kāi)獎(jiǎng)——【送書(shū)福利】機(jī)器人時(shí)代已來(lái)!送你幾本機(jī)器人學(xué)硬核好書(shū)
SCARA工業(yè)機(jī)器人相關(guān)資料推薦
abb機(jī)器人電源模塊短路板短路故障處理
機(jī)器人時(shí)代已正式到來(lái)
智能機(jī)器人時(shí)代哪些工作處于危險(xiǎn)之中?
機(jī)器人時(shí)代:機(jī)器人市場(chǎng)增加,人類未來(lái)終將會(huì)與各種機(jī)器人共存!
服務(wù)機(jī)器人時(shí)代,真的要到來(lái)了嗎
焊接機(jī)器人編程方法及流程技巧
機(jī)器人梯形加減速軌跡時(shí)間縮放





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論