 【英飛凌開發板模塊評測任務大挑戰】開發初體驗
【英飛凌開發板模塊評測任務大挑戰】開發初體驗

芯片
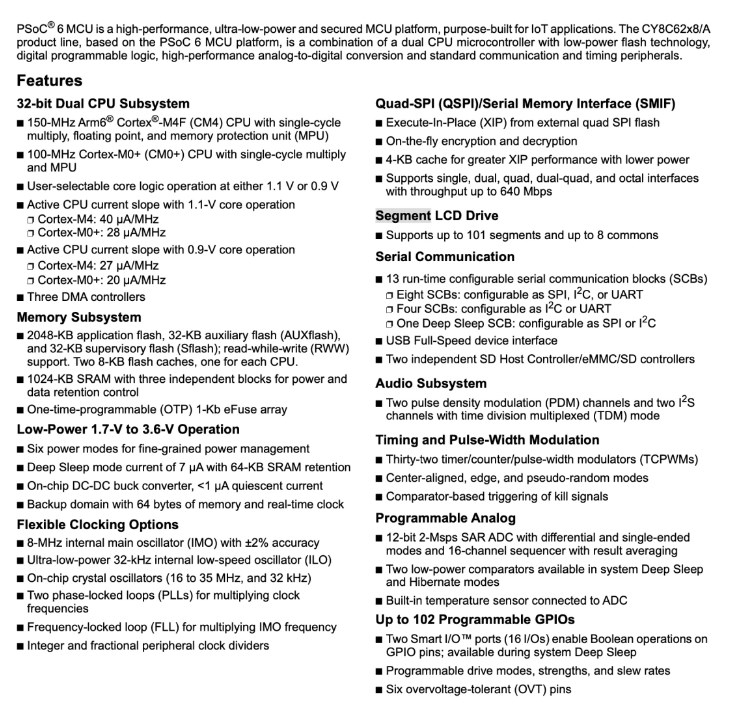
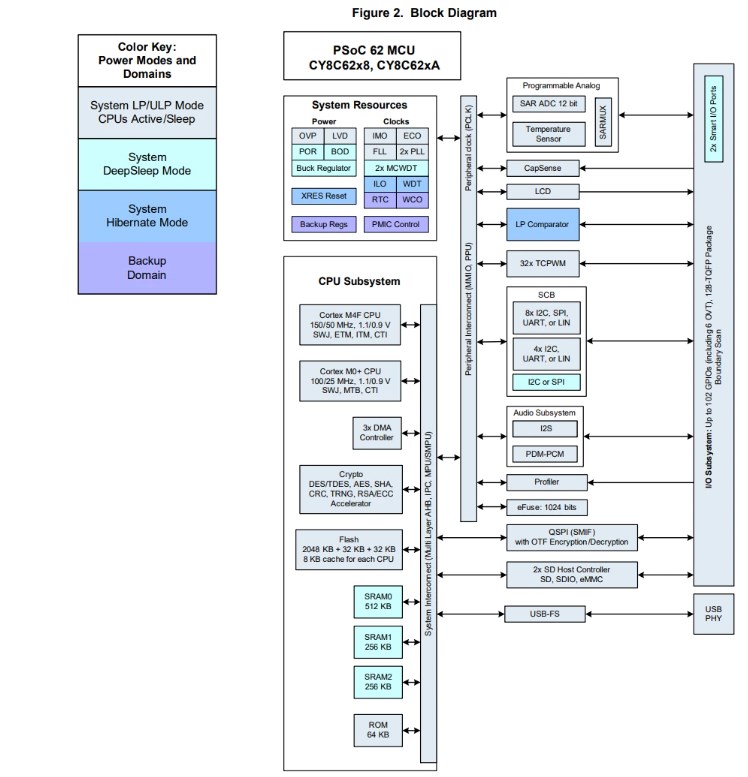
主控芯片型號為 CY8C624ALQALQI-S2D42
dap芯片為 CY8C5868LYTI-LP039
主控芯片Psco624是雙核芯片,一個m4內核和一個m0內核,特征如下:
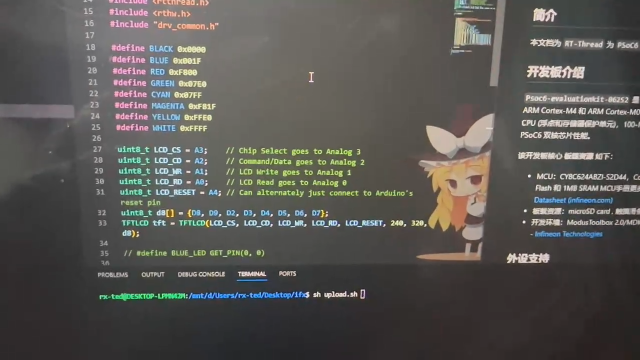
下面寫一點點代碼,體驗一下rtt的開發環境
OpenOCD
rtthread下載使用開源的openocd ,bsp包里不附帶這個開源工具,現在的github上最新版本是0.12。
下載時候出現一個錯誤:

點燈
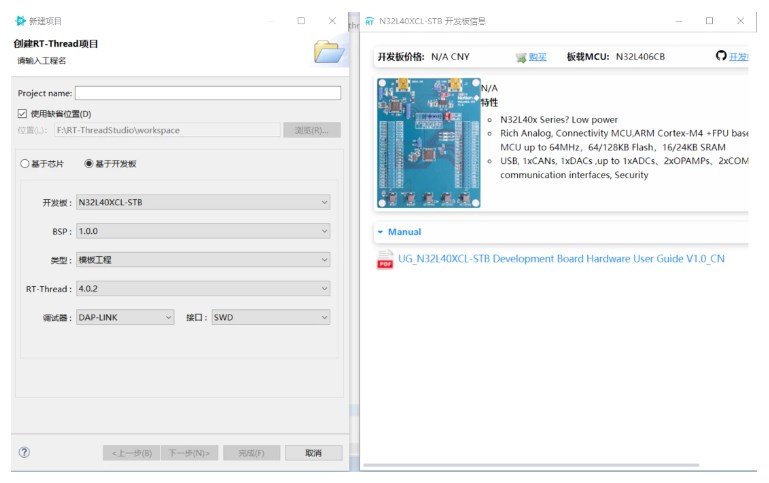
在官方下一個最新版的RT-Thread Studio,安裝,一路next。
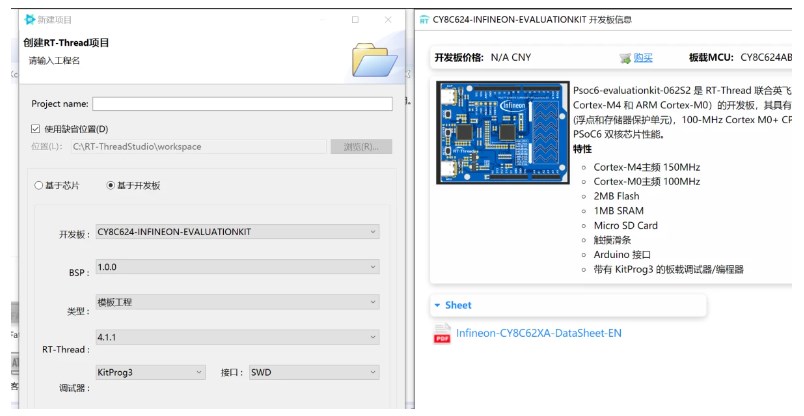
打開rtt sudio,新創建一個工程。

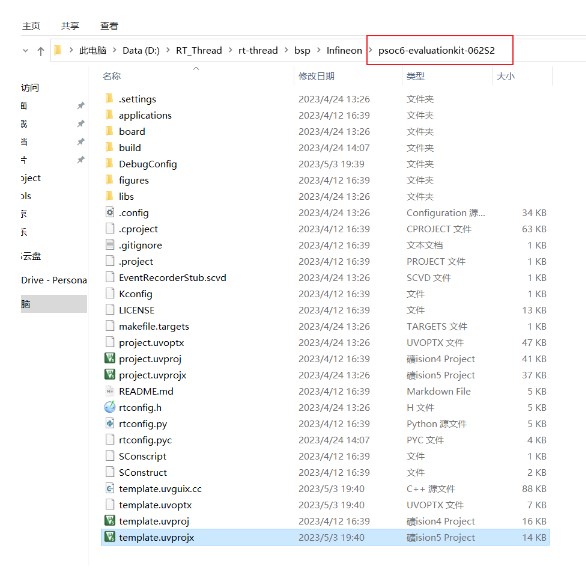
基于我們的開發版創建一個工程。
可以看到官方已經點了一個燈,做測試代碼用,如圖中的高亮文件。

#include
#include
#include
#include "drv_gpio.h"
#define LED_PIN GET_PIN(0, 0)
int main(void)
{
rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);
for (;;)
{
rt_pin_write(LED_PIN, PIN_HIGH);
rt_thread_mdelay(500);
rt_pin_write(LED_PIN, PIN_LOW);
rt_thread_mdelay(500);
rt_kprintf("156456n");
}
}
加了行日志,能打出來,自己的東西能夠運行,代碼就寫了一半了。

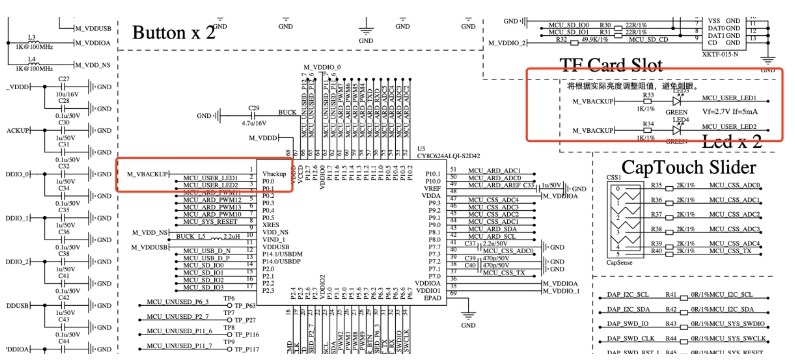
原理圖找到兩個燈

有兩個led燈,用戶可用來點亮,led3和led4,只需要控制影腳p00和p01為低電平就亮了。如果做呼吸燈,加一個pwm的邏輯。
顯示效果: 交替亮滅
#define LED_PIN1 GET_PIN(0, 1)
rt_pin_write(LED_PIN, PIN_HIGH);
rt_pin_write(LED_PIN1, PIN_LOW);
rt_thread_mdelay(500);
rt_pin_write(LED_PIN, PIN_LOW);
rt_pin_write(LED_PIN1, PIN_HIGH);
rt_thread_mdelay(500);
rt_kprintf("156456n");
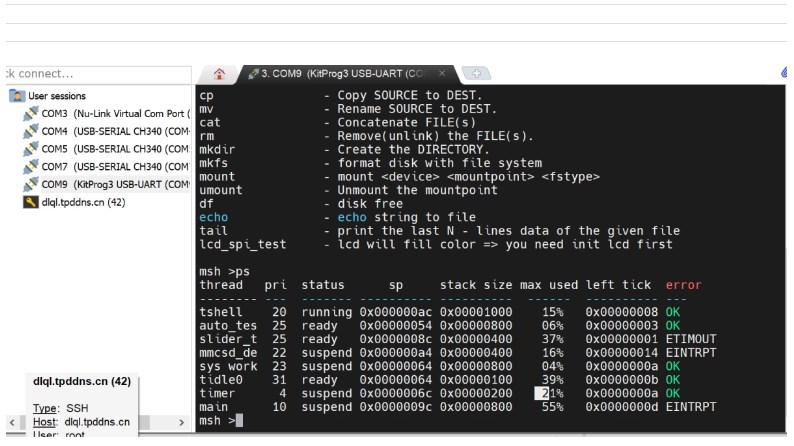
使用ps指令,看下rtt系統運行了多少個線程。
main線程是我的代碼所處的線程,不理解為什么是掛起的狀態。
rtt的結構和編譯邏輯和linux很像,感覺稍有一點親切啊。
-
英飛凌
+關注
關注
68文章
2348瀏覽量
140653 -
led燈
+關注
關注
22文章
1596瀏覽量
109767 -
PWM
+關注
關注
116文章
5530瀏覽量
219502 -
PIN管
+關注
關注
0文章
36瀏覽量
6628 -
RTThread
+關注
關注
8文章
132瀏覽量
41785
發布評論請先 登錄
【評測匯總】Sipeed LicheeRV 86開發板
RT-Thread聯合新唐科技發起開發板評測任務挑戰活動
【PHYTEC開發板試用體驗】之開箱與初體驗視頻


N32L40XCL-STB開發板模塊評測任務大挑戰之UART
英飛凌開發板模塊評測任務大挑戰-SPI驅動測試
開發板評測大賽開啟!頂級開發板等你來戰!

【免費試用】開發板評測大賽開啟!OH 、RISC-V、Rockchip頂級開發板等你試用~
【新品】遠距離圖傳數傳模塊開發板、藍牙模塊開發板、無線模塊開發板






 工商網監
工商網監
評論