") ROS主控與STM32的硬件連接和軟件設(shè)置
ROS主控與STM32的硬件連接和軟件設(shè)置

硬件連接
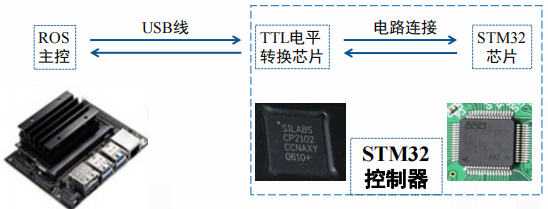
ROS主控通過(guò)usb線連接到一個(gè)TTL電平轉(zhuǎn)換芯片,再由這個(gè)電平轉(zhuǎn)換芯片連接STM32芯片
電平轉(zhuǎn)換芯片可以通過(guò)PCB設(shè)計(jì)在STM32芯片的電路板上,也可以使用一個(gè)USB轉(zhuǎn)TTL的模塊。
為什么兩個(gè)控制器之間需要電平轉(zhuǎn)換芯片?
因?yàn)閮蓚€(gè)控制器之間通信層次邏輯是不同的,所有需要電平轉(zhuǎn)換芯片。相當(dāng)于兩個(gè)主控是兩種不同語(yǔ)言的人,電平轉(zhuǎn)換芯片相當(dāng)于一個(gè)翻譯。
電平轉(zhuǎn)換芯片可以是:
- cp2102
- ch340
- PL2303
- FT232RL
軟件設(shè)置
硬件連接上之后,需要一個(gè)軟件設(shè)置
需要軟件設(shè)置原因:
ROS主控可能接入多個(gè)USB設(shè)備,或者接入兩個(gè)型號(hào)一樣的電平轉(zhuǎn)換芯片。
不同USB設(shè)備占用的ROS主控的端口號(hào)在每次上電時(shí)可能會(huì)不一致,這樣需要手動(dòng)修改代碼中的配置參數(shù),比較麻煩,也無(wú)法做到自啟動(dòng)。
如果存在多個(gè)USB設(shè)備,但是每種USB設(shè)備的電平轉(zhuǎn)換芯片不一樣,那么我們可以根據(jù)芯片名稱來(lái)知道端口號(hào),但是如果有兩個(gè)芯片一樣的電平轉(zhuǎn)換芯片,則無(wú)法區(qū)分,這時(shí)候想做自啟動(dòng)那么必須要進(jìn)行下面步驟的軟件設(shè)置
軟件設(shè)置分為兩步:
- 第一步是更改電平轉(zhuǎn)換芯片的serial,
- 第二步是創(chuàng)建設(shè)備別名
更新電平轉(zhuǎn)換芯片的serial
首先在win環(huán)境下安裝更改芯片serial的軟件
CP21xx
Customization Utility.exe
這個(gè)軟件在網(wǎng)上下載就可以
打開(kāi)這個(gè)軟件,然后將芯片連接電腦的USB

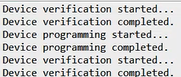
然后將圓圈位置改為0002,然后點(diǎn)擊Program Device。
點(diǎn)完之后要等下,在Status Logging窗口中出現(xiàn)下面信息,才說(shuō)明修改好了
-
控制器
+關(guān)注
關(guān)注
114文章
17110瀏覽量
184283 -
STM32
+關(guān)注
關(guān)注
2293文章
11032瀏覽量
364915 -
智能車
+關(guān)注
關(guān)注
21文章
409瀏覽量
77566 -
ROS
+關(guān)注
關(guān)注
1文章
288瀏覽量
17744
發(fā)布評(píng)論請(qǐng)先 登錄
【項(xiàng)目分享】SLAM+語(yǔ)音機(jī)器人硬件部分——stm32主控硬件設(shè)計(jì)
ROS與STM32之間的聯(lián)系
【ROS RIKIBOT基礎(chǔ)--使用系列 第一章節(jié)】ROS機(jī)器人硬件系統(tǒng) 精選資料分享
ROS與STM32是如何進(jìn)行通信的
ROS如何在代碼層面去接收stm32發(fā)送過(guò)來(lái)的數(shù)據(jù)?
stm32cubemx的ST-link v2硬件連接與軟件設(shè)置如何去實(shí)現(xiàn)呢
基于FreeRTOS的micro(微型)ROS

ros智能小車硬件介紹

STM32 SPI 軟件NSS和硬件NSS解讀
ROS與STM32通信
ROS小車STM32底層控制代碼
ROS主控與STM32的硬件連接和軟件連接






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論