") IMU/GNSS與車體外參標(biāo)定
IMU/GNSS與車體外參標(biāo)定
作為無人車以及智能機(jī)器人而言,在裝配過程中各個傳感器之間的外參標(biāo)定一直是比較頭疼的問題。這里作者也系統(tǒng)的學(xué)習(xí)了一下,傳感器的外參標(biāo)定和在線標(biāo)定問題。
下圖是我們常用的幾個坐標(biāo)系,而對于常用的外參問題經(jīng)常是IMU/GNSS與車體坐標(biāo)的外參、Lidar和Camera的外參、Lidar和Lidar的外參、Lidar和IMU/GNSS的外參。

- 離線外參標(biāo)定
1.1 IMU/GNSS與車體外參標(biāo)定
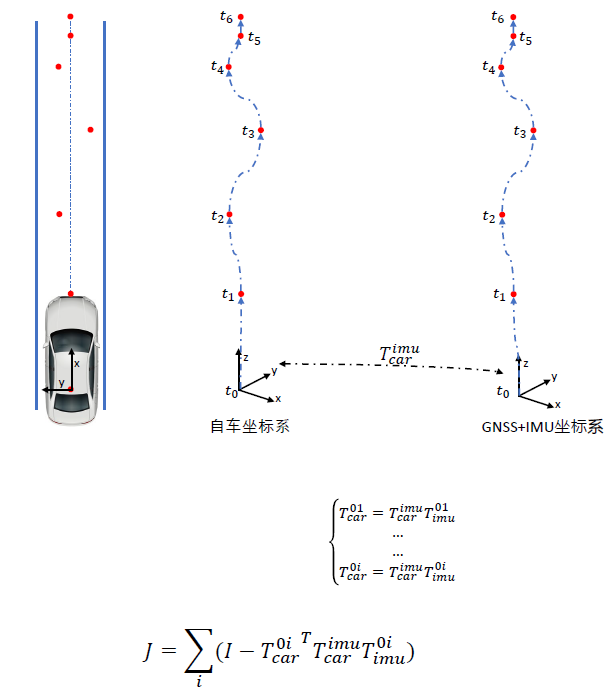
這個IMU/GNSS與車體外參標(biāo)定如下圖所示,主要需要獲取**T_{car}^{imu}**坐標(biāo)系,這一類IMU/GNSS設(shè)備通過內(nèi)部的緊耦合可以綜合輸出一系列校準(zhǔn)后的位姿信息。
同時IMU的輸出頻率是很高的,所以通過插值的形式可以有效地提高整體綜合的頻率輸出。
為了去標(biāo)定外參,一般的方法是獲取位姿運(yùn)動的位姿序列,并通過GNSS/IMU來觀測車輛自身的運(yùn)動(有的時候我們可以通過繞圈的形式+手持點(diǎn)測繪來對車輛自身坐標(biāo)和GNSS坐標(biāo)進(jìn)行匹配計算)。
通過獲取很多個觀測和gnss的轉(zhuǎn)換可以得到cost fuction參與到里面去優(yōu)化。
這里我們也給出了基于車體坐標(biāo)系odom和IMU的位姿聯(lián)合矯正的相關(guān)代碼,考慮到IMU和輪速計的數(shù)據(jù)收集過程中本身在時間上就很難做到完全對齊,此時引入時間偏移(delta_t)用于表示兩者采集時間片之間的誤差,通過循環(huán)標(biāo)定新產(chǎn)生的輪速計數(shù)據(jù)和原先的IMU
數(shù)據(jù),選取誤差最小的結(jié)果作為最終兩者之間的標(biāo)定,相應(yīng)的(delta_t)即認(rèn)為兩者采集時間的偏差。
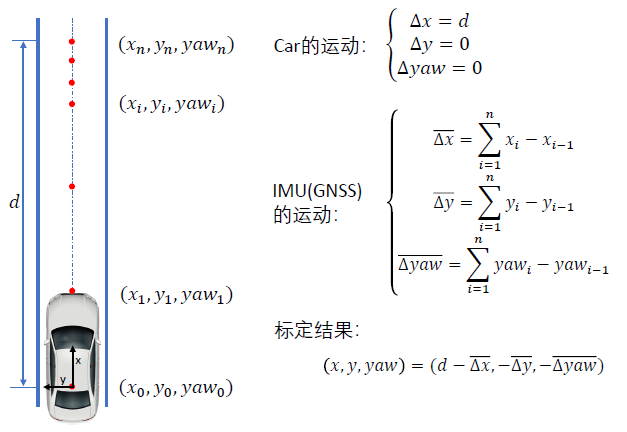
其實(shí)作為車輛來說,在平面測量后,其實(shí)只需要觀測x,y,yaw即可。所以可以將用直線來做約束和校準(zhǔn),得到下圖的公式:

-
檢測
+關(guān)注
關(guān)注
5文章
4576瀏覽量
92379 -
GNSS
+關(guān)注
關(guān)注
9文章
831瀏覽量
48812 -
IMU
+關(guān)注
關(guān)注
6文章
333瀏覽量
46372
發(fā)布評論請先 登錄
相關(guān)推薦

GNSS仿真引擎Skydel軟件使用培訓(xùn)課程-先導(dǎo)課 #GNSS模擬 #GNSS仿真 #gnss
3DM-GX5-15 慣性測試單元IMU
IMU 3DM-GX5-25
IMU誤差來源/表達(dá)式/標(biāo)定
基于CP-132UL V2的標(biāo)定測試軟件實(shí)現(xiàn)完成對IMU的標(biāo)定工作
GNSS+IMU+MM車載高精度組合導(dǎo)航定位系統(tǒng)對比分析

GNSS+IMU+MM車載組合導(dǎo)航系統(tǒng)解決方案
高精度IMU在AVP場景中的應(yīng)用
激光雷達(dá)相機(jī)外參標(biāo)定相關(guān)內(nèi)容
IMU測量原理與標(biāo)定算法的實(shí)現(xiàn)

校準(zhǔn)多個慣性測量單元(IMU)和各個軸的外參

車輛中的標(biāo)定概述
汽車電子激光雷達(dá)和相機(jī)的自動在線外參標(biāo)定技術(shù)

淺析傳感器的外參標(biāo)定和在線標(biāo)定問題






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論