") 機器人擺動相軌跡設(shè)計
機器人擺動相軌跡設(shè)計

1、擺動相軌跡設(shè)計
基于第二節(jié)中提到的原則,文獻(xiàn)[1]中提出了一種基于復(fù)合擺線形式的軌跡規(guī)劃方法,并在文獻(xiàn)[2]中得到了驗證和使用。
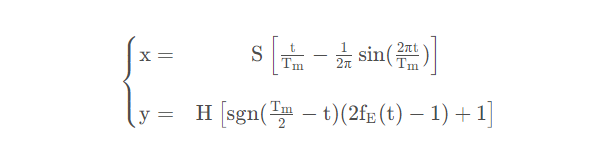
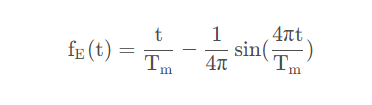
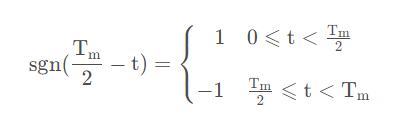
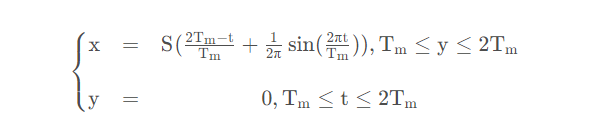
針對機器人足底與地面接觸時會產(chǎn)生滑動和行走過程中拖地問題,文獻(xiàn)[2]對復(fù)合擺線規(guī)劃方法提出了修改,修改后的擺動腿的步態(tài)規(guī)劃軌跡定義為:
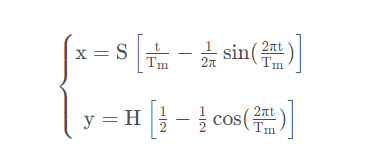
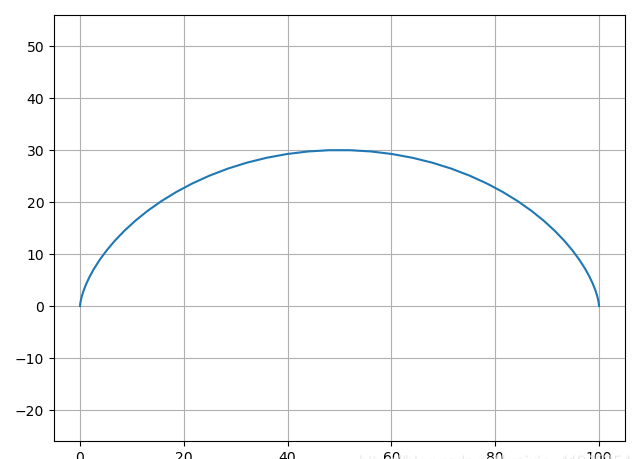
其中S為步幅, H為抬腿高度,T m 為擺動相周期現(xiàn)在我們來看提下它的圖像,設(shè)定S = 100, H = 30, 周期T=2。
我們用python繪制該軌跡的圖像如下:
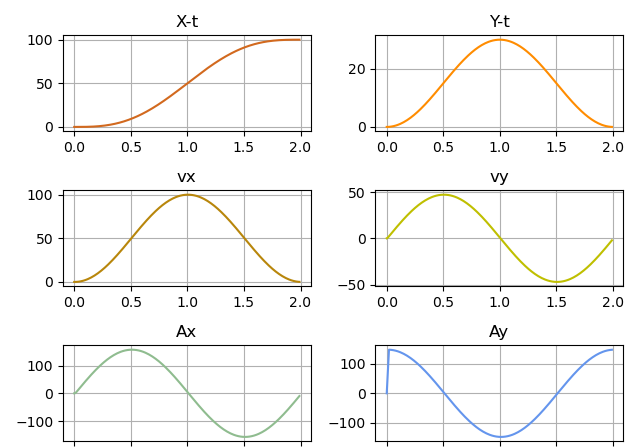
為了更好地研究該軌跡的特性,我們接下來依次看x,y關(guān)于時間的位置,速度,加速度
2、軌跡改進(jìn)
從表達(dá)式上分析,該軌跡的加速度方程是余弦函數(shù)的倍數(shù),在 t=0 和 t=Tm時刻會出現(xiàn)加速度跳變,根據(jù)F = M a
,這就導(dǎo)致了抬腿的瞬間要求產(chǎn)生較大的接觸力。
從加速度圖像亦能說明這一點。針對這一問題,文獻(xiàn)[5]對 y 方向的位移方程提出了以下修改。
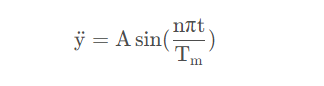
由于擺動腿在 y 軸運動需要先抬腿再落腿,借鑒 x 軸正弦方式運動的方法求解 y 軸位移曲線
先從加速度函數(shù)入手,我們設(shè)計成如下形式:
對上式進(jìn)行積分求得速度函數(shù):

對速度函數(shù)進(jìn)行積分,求得位移函數(shù)為:

為了確定n的取值,我們來看看n取不同值時的速度圖像,取T = 2 , H = 1 , S = 1
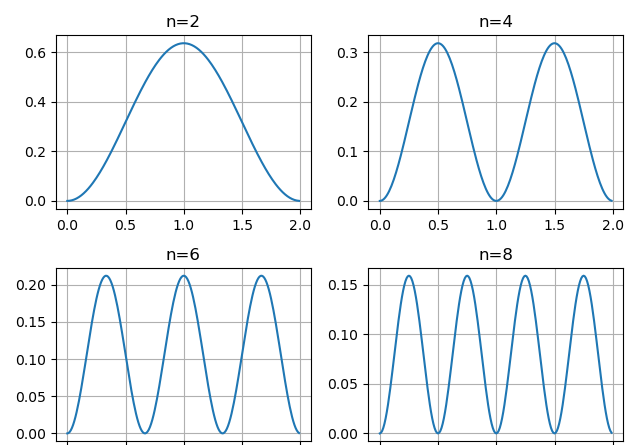
可以看出,當(dāng)n越大時,y方向上的速度變化就越頻繁,這可能會導(dǎo)致系統(tǒng)能耗的增加。
再來看位移圖像:
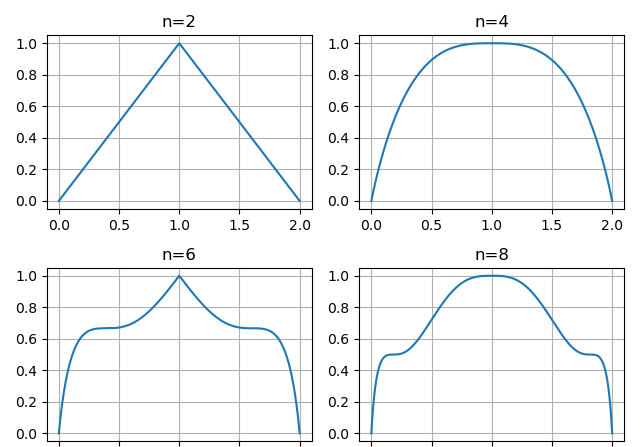
從位移圖像來看,只有當(dāng)n取4時,軌跡才是平滑的。因此我們可以確定軌跡的最終形式為:
其中
-
機器人
+關(guān)注
關(guān)注
213文章
29607瀏覽量
212137 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4376瀏覽量
64527 -
軌跡
+關(guān)注
關(guān)注
0文章
46瀏覽量
9443
發(fā)布評論請先 登錄
用labview能實現(xiàn)挖掘機機器人的軌跡規(guī)劃嗎?
什么是工業(yè)機器人
機器人視覺——機器人的“眼睛”
關(guān)節(jié)機器人控制
【機器人在線】噴涂機器人軌跡偏差優(yōu)化的發(fā)展現(xiàn)狀
基于機器人的曲線焊接系統(tǒng)
機器人基礎(chǔ)書籍
機器人系統(tǒng)是什么?
差速移動機器人軌跡跟蹤控制方法
淺談差速機器人的純軌跡跟蹤仿真
軌跡機器人教案
機器人的軌跡規(guī)劃與生成

碼垛機器人軌跡函數(shù)的優(yōu)化
焊接機器人拖拽軌跡怎么設(shè)置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論