 相機標定中各種標定板介紹以及優缺點分析
相機標定中各種標定板介紹以及優缺點分析

導讀
各種標定板的解釋和分析。
準確標定像機對于所有的機器/計算機視覺的成功應用都是非常重要的。然而,對于標定板,有不同的模式可供選擇。為了方便進行選擇,本文將解釋每種方法的主要好處。
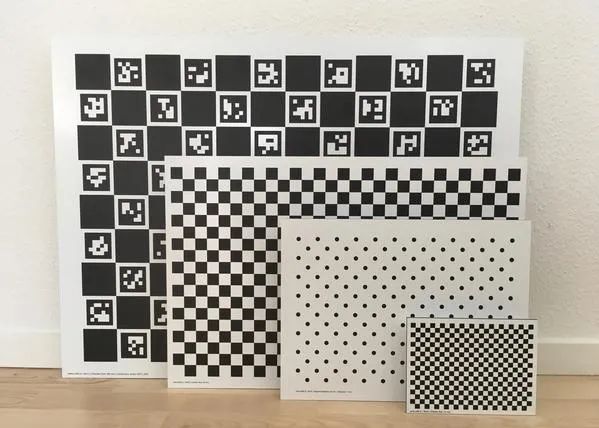
標定板的選擇,有CharuCo,棋盤格,不對稱的圓和棋盤格。
標定板尺寸
在選擇標定板時,一個重要的考慮因素是它的物理尺寸。這最終關系到最終應用的測量視場(FOV)。這是因為相機需要聚焦在特定的距離上標定。改變焦距長度會輕微地影響對焦距離,這會影響之前的標定。即使是光圈的改變通常也會對標定的有效性產生負面影響,這就是為什么要避免改動它們。
為了精確的標定,當攝像機看到標定目標填充大部分圖像時,攝像機模型最好是受到約束的。通俗來說,如果使用一個小的標定板,許多相機參數的組合可以解釋所觀察到的圖像。根據經驗,當正面觀察時,標定板的面積至少應該是可用像素面積的一半。
標定板類型
多年來已經引入了不同的標定板,每種標定板都有獨特的屬性和好處。
要選擇正確的類型,首先要考慮使用哪種算法和算法實現。在OpenCV或MVTec Halcon等通用庫中,標定板有一定的自由度,它們有各自的優點和局限性。
棋盤格
這是最流行、最常見的圖案設計。通常通過首先對攝像機圖像進行二值化并找到四邊形(黑色的棋盤區域)來找到棋盤角點的候選點。過濾步驟只保留那些滿足特定大小標準的四邊形,并組織在一個規則的網格結構中,網格結構的尺寸與用戶指定的尺寸匹配。
在對標定板進行初步檢測后,可以以非常高的精度確定角點位置。這是因為角(數學上:鞍點)基本上是無限小的,因此在透視變換或鏡頭失真下是無偏的。
在OpenCV中,整個棋盤必須在所有圖像中可見才能被檢測到。這通常使得從圖像的邊緣獲取信息變得困難。這些區域通常是很好的信息來源,因為它們適當地約束了鏡頭失真模型。
在檢測出棋盤格后,可以進行亞像素細化,以找到具有亞像素精度的鞍點。這利用了給定角點位置周圍像素的確切灰度值,并且精度比整數像素位置所允許的精度要精確得多。
你可以查看OpenCV棋盤檢測器的源代碼:https://github.com/opencv/opencv/blob/master/modules/calib3d/src/calibinit.cpp。關于棋盤格目標的一個重要細節是,為了保持旋轉不變,行數必須是偶數,列數必須是奇數,或者相反。例如,如果兩者都是偶數,則存在180度旋轉的歧義。對于單臺相機的校準,這不是一個問題,但如果相同的點需要由兩個或更多的相機識別(對于立體校準),這種模糊性必須不存在。這就是為什么我們的標準棋盤目標都具有偶數/奇數行/列的屬性。
圓形網格
圓形網格也是一種流行且非常常見的校準目標設計,它基于圓形,或者是白色背景上的白色圓形,或者是白色背景上的黑色(黑色)圓形。在圖像處理術語中,圓可以被檢測為圖像中的“斑點”。在這些二元斑點區域上應用一些簡單的條件,如面積、圓度、凸度等,可以去除候選的壞特征點。
在找到合適的候選對象后,再次利用特征的規則結構對模式進行識別和過濾。圓的確定可以非常精確,因為可以使用圓外圍的所有像素,減少了圖像噪聲的影響。然而,與棋盤中的鞍點不同的是,在相機視角下,圓形被成像為橢圓。這種觀點可以通過圖像校正來解釋。然而,未知的鏡頭畸變意味著圓不是完美的橢圓,這增加了一個小的偏置。然而,我們可以將畸變模型看作是分段線性的(服從透視變換/單應性),因此在大多數透鏡中,這種誤差非常小。
對稱圓網格和非對稱圓網格的一個重要區別是,對稱圓網格具有180度的模糊性,正如“棋盤”一節中所解釋的那樣。因此,對于立體校正,非對稱網格是必要的。否則,這兩種類型的性能都不會有太大的差別。
圓形網格檢測的OpenCV源代碼:https://github.com/opencv/opencv/blob/master/modules/calib3d/src/circlesgrid.cpp。
CharuCo
CharuCo標定板克服了傳統棋盤的一些限制。然而,它們的檢測算法有點復雜。幸運的是,CharuCo檢測是OpenCVs contrib庫的一部分(從OpenCV 3.0.0開始),這使得集成這個高級方法非常容易。
CharuCo的主要優點是所有光檢查器字段都是唯一編碼和可識別的。這意味著即使是部分遮擋或非理想的相機圖像也可以用于校準。例如,強烈的環形光可能會對標定目標產生不均勻的光照(半鏡面反射區域),這將導致普通棋盤格檢測失敗。使用CharuCo,剩余的(好的)鞍點檢測仍然可以使用。鞍點定位可以像棋盤一樣使用亞像素檢測來細化。
對于接近圖像角落的觀察區域,這是一個非常有用的屬性。由于目標的定位使得攝像機只能看到它的一部分,所以我們可以從攝像機圖像的邊緣和角落收集信息。這通常會帶來確定鏡頭失真參數時的非常好的魯棒性。因此,我們強烈推薦使用CharuCo標定板,OpenCV 3.x是可用的。
自然,CharuCo目標可以用于立體校準。在這種情況下,需要執行一些代碼來找到在每個攝像頭中單獨檢測到的點,以及在兩個攝像頭中都檢測到的點(交點)。
-
相機
+關注
關注
4文章
1459瀏覽量
54626 -
計算機視覺
+關注
關注
9文章
1708瀏覽量
46735 -
OpenCV
+關注
關注
32文章
642瀏覽量
42762
原文標題:相機標定中各種標定板介紹以及優缺點分析
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
opencv相機標定原理與步驟

相機標定——標定圖片拍攝規范

相機標定含義(解決什么是相機標定)

雙目相機標定的原理和方法

什么是相機標定 常用相機標定的方法

相機標定究竟在標定什么?

相機標定中的坐標變換原理難點分析






 工商網監
工商網監
評論