 MoveIt的快速安裝方法
MoveIt的快速安裝方法

MoveIt的安裝
安裝moveit,如果不想挑戰源碼編譯,MoveIt可以用apt-get快速安裝,只需要輸入:
$ sudo apt-get install ros-indigo-moveit-full
本系列博文將以一個雙臂機器人為例,詳細講解基于MoveIt的使用方法,我為這個雙臂機器人取名為:rob。
并在Solidworks中簡單繪制了該機器人的三維模型,結構示意圖如下:
Rob包含兩個手臂,左右對稱布局,每個手臂包含5個自由度,關節情況如下圖所示。
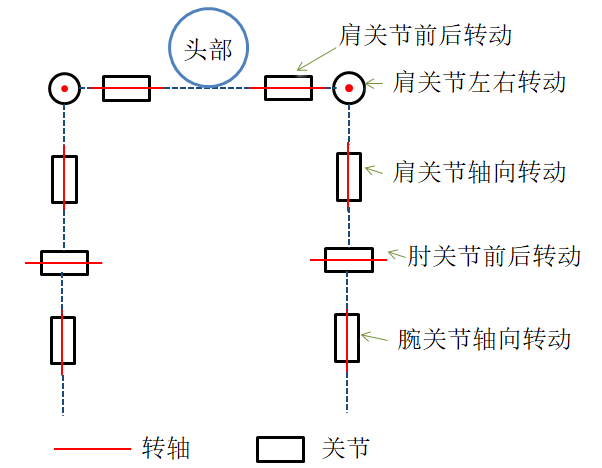
這種關節分布是仿人形的雙臂機器人常用的手臂設置形式。
但這種結構并不能完全覆蓋人手臂所有的自由度(人的手臂包含7個自由度)。
但用于說明 MoveIt 的使用已經足夠了。
此外,各個關節的自由度范圍如下表所示。

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29664瀏覽量
212413 -
Linux
+關注
關注
87文章
11506瀏覽量
213396 -
ROS
+關注
關注
1文章
287瀏覽量
17684
發布評論請先 登錄
相關推薦
熱點推薦
使用moveit控制真實機械臂的方法
、 /status,這個方框里的全部就構成了一個action,這與下圖的表述也是一致的。 2、moveit用了哪些action? 可以肯定的是,moveit!使用了不止一個action,每個action的名稱就是
發表于 05-21 09:10



使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 創建逼真的機器人模擬
MoveIt 2 與 NVIDIA Isaac Sim 中模擬的機器人進行集成的過程。本教程需要一臺安裝了 Isaac Sim 2022.2.0 的電腦,以及如下所列的系統配置。請
虹科分享|如何防范MOVEit傳輸漏洞|高級威脅防御
美國網絡安全和基礎設施安全局(CISA)承認,它正在向幾個聯邦機構提供支持,這些機構在Progress(前身為IpSwitch)MOVEit傳輸解決方案中暴露出漏洞后被攻破。根據CISA發布的一份


ROS系統的MoveIt模塊介紹
機器人操作系統ROS目前最受關注的兩個模塊是導航(Navigation)和機械臂控制(MoveIt!)。 其中,機械臂控制模塊(后面簡稱MoveIt)可以讓用戶快速建立機械臂模型并實現機械臂的控制





 工商網監
工商網監
評論