 ROS通信接口機制介紹
ROS通信接口機制介紹
接口可以讓程序之間的依賴降低,便于我們使用別人的代碼,也方便別人使用我們的代碼,這就是ROS的核心目標,減少重復造輪子。
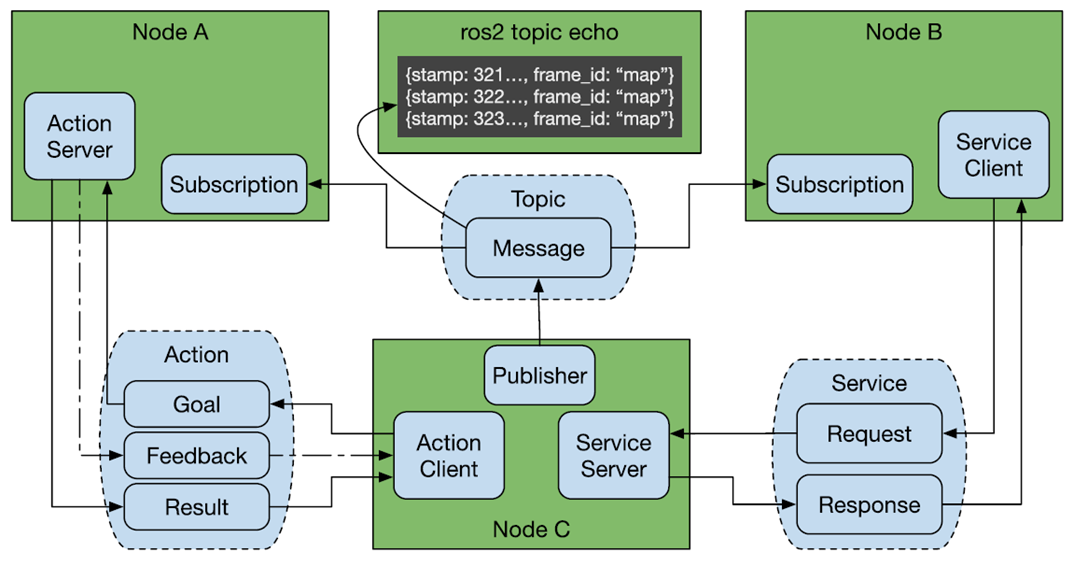
ROS有三種常用的通信機制,分別是話題、服務、動作,通過每一種通信種定義的接口,各種節點才能有機的聯系到一起。
語言無關
為了保證每一個節點可以使用不同語言編程,ROS將這些接口的設計做成了和語言無關的。
比如這里看到的int32表示32位的整型數,int64表示64位的整型數,bool表示布爾值,還可以定義數組、結構體,這些定義在編譯過程中,會自動生成對應到C++、Python等語言里的數據結構。

話題通信接口的定義使用的是.msg文件,由于是單向傳輸,只需要描述傳輸的每一幀數據是什么就行,比如在這個定義里,會傳輸兩個32位的整型數,x、y,我們可以用來傳輸二維坐標的數值。
服務通信接口的定義使用的是.srv文件,包含請求和應答兩部分定義,通過中間的“---”區分,比如之前我們學習的加法求和功能,請求數據是兩個64位整型數a和b,應答是求和的結果sum。
動作是另外一種通信機制,用來描述機器人的一個運動過程,使用.action文件定義。
比如我們讓小海龜轉90度,一邊轉一邊周期反饋當前的狀態,此時接口的定義分成了三個部分,分別是動作的目標;
比如是開始運動,運動的結果,最終旋轉的90度是否完成,還有一個周期反饋;
比如每隔1s反饋一下當前轉到第10度、20度還是30度了,讓我們知道運動的進度。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29567瀏覽量
211940 -
服務器
+關注
關注
13文章
9730瀏覽量
87445 -
通信接口
+關注
關注
3文章
251瀏覽量
31406 -
ROS
+關注
關注
1文章
286瀏覽量
17606
發布評論請先 登錄
相關推薦
熱點推薦
基于串口的STM32通過rosserial和ROS系統通信的代碼
前言最初參考網上資料移植了一份基于串口的STM32通過rosserial和ROS系統通信的代碼。對于小數據量格式的消息,可以正常通信,但消息量一大便會出錯(如:發布ROS提供的odom
發表于 08-06 08:54
ROS與STM32是如何進行通信的
ROS與STM32通信2020.8.1主要內容制作ROS包,將控制命令傳給STM32,并將接收到的數據作為話題進行發布STM32接收數據并將姿態數據傳回給ROS接收:期望角速度、期望線
發表于 08-11 07:25
什么是ROS?ROS產生、發展和壯大的原因和意義
基本問題1. 什么是 ROSROS 是一個操作系統ROS 是一種跨平臺模塊化軟件通訊機制ROS 是一系列開源工具ROS 是一系列最先進的算法2.
發表于 12-17 06:08
如何在ROS上使用serial包進行串口通信
如何在ROS上使用其提供的serial包進行串口通信。我的環境介紹:PC:使用的是Ubuntu 16-04 ROS-Kinetic嵌入式端:STM32F071
發表于 02-21 07:27
RT-Thread實時操作系統與ROS2是怎樣進行通信的
的資源有限,并不能直接運行完整的 ROS。于是,通常的做法是利用 Linux 豐富的軟件包實現一些頂層算法,而 RT-Thread 則負責實時控制相關的任務,它們之間的通信就是后面會介紹到
發表于 04-01 11:38
ROS是什么?機器人操作系統ROS的介紹
ROS 也自稱是一個 OS。 2、是一種跨平臺模塊化軟件通訊機制 ROS 用節點(Node)的概念表示一個應用程序,不同 node 之間通過事先定義好格式 的消息(Topic),服
發表于 09-13 17:23
?14次下載

ROS與STM32通信
ROS與STM32通信2020.8.1主要內容制作ROS包,將控制命令傳給STM32,并將接收到的數據作為話題進行發布STM32接收數據并將姿態數據傳回給ROS接收:期望角速度、期望線
發表于 12-24 19:00
?12次下載

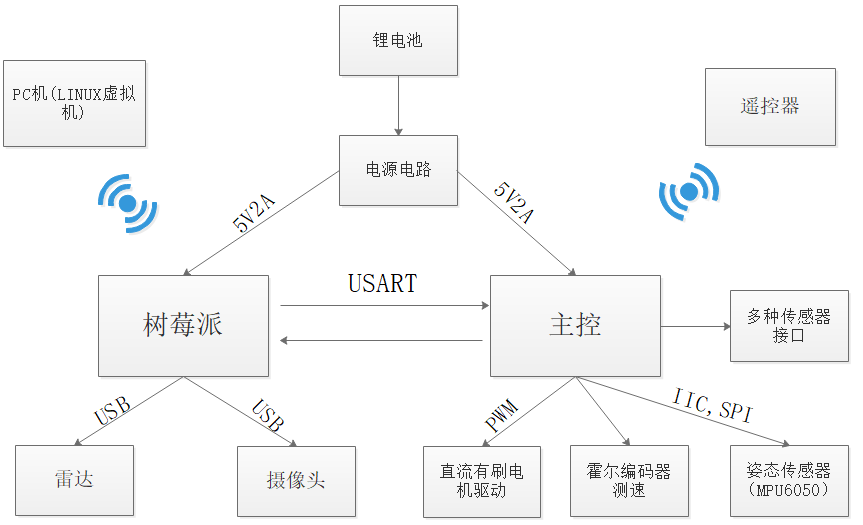
ROS移動機器人的通信接口電路設計
本文來聊聊ROS移動機器人中控制器與樹莓派進行傳輸信號的通信接口電路設計。在此之前回顧下在本項目第一篇文章中提到的硬件框圖。
ROS基本介紹
近來找到的實習主要是做智能車控制,用到的也就是ROS機器人操作系統,ROS需要運行在一個操作系統上,這個操作系統常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS組合就是實習的主要學習內容了。所以我就新開

ROS1的通信架構的基礎通信方式及相關概念
ROS的通信架構是ROS的靈魂所在,它包括數據處理,進程運行,消息傳遞等** 。這篇文章主要介紹ROS1的

Unity與ROS鏈接介紹
對于ROS而言,其最常用的就是Topic話題以及Service兩個了。之前我們在了解Unity Robotics Hub時候就了解到基本的Unity和ROS的通訊,下面我們來詳細介紹一下Unity

ROS核心框架介紹
ROS核心框架 對于第一個問題,我也沒仔細研究過源碼,核心代碼基本由python和C++組成,運用了xmlrpc機制,每個運行的節點可以理解成一個進程。進程間通訊有些是共享內存的方式(比如






 工商網監
工商網監
評論