 TogetherROS系統更新和CPU調頻策略配置
TogetherROS系統更新和CPU調頻策略配置

系統更新
第二個配置,是更新當前旭日X3派所使用的Ubuntu鏡像,和在電腦上使用的命令相同。
我們更新一下當前的系統鏡像:
$ sudo apt update #會按照當前軟件源的域名設置去連接遠程軟件源
$ sudo apt full-upgrade #升級所有可以升級的軟件包
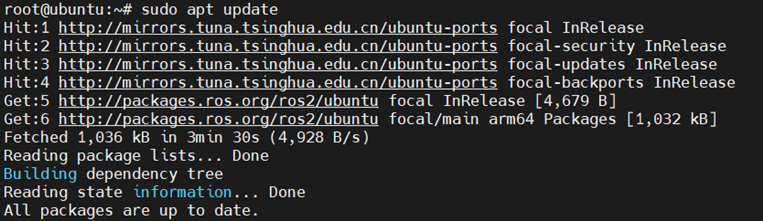
彈出如下對話,我們選擇“Y”,回車;

這樣我們就完成了對系統更新的檢查,并安裝好了更新包。
CPU調頻策略
第三個配置,設置CPU的調頻策略,這是一個可選項,大家了解之后,在未來需要使用的時候進行配置即可。
動態調頻 $ echo > ondemand /sys/devices/system/cpu/cpufreq/policy0/scaling_governor #讓系統根據當前負載,動態調整CPU頻率
滿頻模式 $ echo > performance /sys/devices/system/cpu/cpufreq/policy0/scaling_governor #讓CPU始終以滿頻,也就1.2GHz的頻率工作
打開超頻 $ echo 1 > /sys/devices/system/cpu/cpufreq/boost #使CPU以超頻,也就是1.5GHz的頻率工作
關閉超頻 $ echo 0 > /sys/devices/system/cpu/cpufreq/boost
這里CPU頻率為,滿頻模式:1.2GHz,超頻模式:1.5GHz。

大家需要注意,默認的系統配置是關閉超頻、并且動態調頻的配置。這樣可以比較好地保證功率最優。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29749瀏覽量
213011 -
cpu
+關注
關注
68文章
11082瀏覽量
217167 -
Ubuntu
+關注
關注
5文章
592瀏覽量
31276 -
ROS
+關注
關注
1文章
288瀏覽量
17759
發布評論請先 登錄
相關推薦
熱點推薦
Cyclone IV器件的配置和遠程系統更新
本章節介紹了 Cyclone? IV 器件的配置和遠程系統更新。Cyclone IV (Cyclone IV GX和 Cyclone IV E)器件使用 SRAM 單元存儲配置數據。由
發表于 11-14 10:13
HCI連接更新和加密程序
你好,我正在評估HCI模式下的CY5676A進程256KB模塊。我試圖從同一個設備同時發送兩個控制程序;連接更新和加密;該設備處理連接更新命令并發送請求LLyCalnFutsUpDATE.IN,在到
發表于 10-24 16:40
BIOS更新和較舊的四核處理器是否存在兼容性問題?
我剛剛從英特爾驅動程序部分的更新中更新了我的BIOS。更新后,我的處理器在BIOS屏幕空閑時加熱到97C。完全運行計算機的唯一方法是禁用所有增強選項,僅在1核上運行,并將CPU風扇設置
發表于 11-05 11:20
【米爾MYD-J1028X開發板試用體驗】體驗米爾MYD-J1028X開發板 NXP LS1028A處理器 CPU調頻策略
系統:查看MYC-J1028X開發板設置CPU調頻策略指令:root@forlinx:/# cat /sys/devices/system/cpu
發表于 10-07 18:47
嵌入式學習板-ElfBoard ELF 1 固定CPU頻率的方法
圖形化界面配置Linux內核的CPU調頻策略:
需要先執行“make imx6ull_elf1_defconfig”命令生成.config,然后再使用圖形界面進行
發表于 10-25 09:47
雙饋風電機組一次調頻策略
針對雙饋風電機組( DFIGs)不具備調頻控制能力的問題,設計DFIG -次調頻控制策略,實現了DFIG參與電網一次調頻。研究DFIG功率控制原理和頻率響應過程,并考慮虛擬慣量、頻率下
發表于 12-28 15:35
?2次下載
使用DRaaS測試操作系統更新和新代碼版本
幾乎每個數據中心都需要測試操作系統更新和新代碼版本。采用DRaaS解決方案就可以滿足需求。問題是這些測試需求需要一個正在測試的服務器的副本以及最新的數據副本。
linux CPU是這樣動態調頻
針對sep4020的linux低功耗研究也有一段時間了,基本把低功耗的實現方式想清楚了(主要分成機制和策略),這段時間的工作主要在機制上。暫時想實現的主要的機制有:cpu級,設備驅動級,系統平臺級。管理顆粒度不斷遞增,形成三駕馬
發表于 04-22 17:26
?1817次閱讀

如何實現遠程FPGA的更新和重啟
如今, 大多數通訊系統均將FPGA作為其產品解決方案, 且已有大量FPGA應用到通訊系統之中。為了達到降低系統維護的成本的目的,我們就需要實現FPGA遠程更新重啟
發表于 07-10 16:01
?21次下載
TogetherROS Bot相機驅動方法
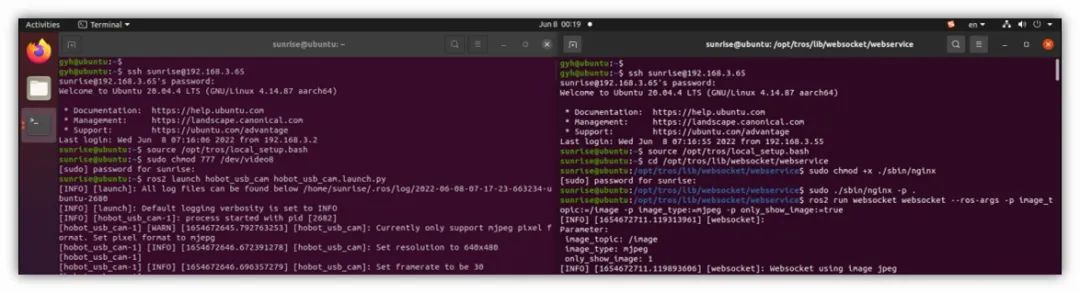
TogetherROS?·Bot相機驅動 除此之外,TogetherROS?·Bot中也提供了USB攝像頭的驅動節點,連接攝像頭之后,直接設置設備的權限和TogetherROS的環境變量就可以使用了
TogetherROS系統的通信功能測試
通信測試 先來測試一下TogetherROS?·Bot系統的通信功能。 我們需要啟動兩個終端,分別連接到旭日X3派上,并分別按以下命令配置環境變量。 終端1: ** source /opt/tros
TogetherROS系統中如何配置網絡連接
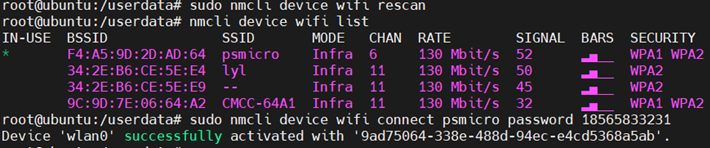
無論是旭日X3派,還是TogetherROS,在正式使用之前,都還需要進行一些必要的配置,完善必要的功能模塊,提供完整的算力支持,達到最佳狀態。 網絡連接 第一個配置,是無線網絡連接。 當然,大家也
華為云 X 實例 CPU 性能測試詳解與優化策略
分析 ? 3.2 CPU性能瓶頸分析 ? 4. CPU性能優化策略 ? 4.1 優化CPU性能的常用方法 ? 4.2 操作系統內核調優 ?





 工商網監
工商網監
評論