 機器視覺知識要點
機器視覺知識要點

定位器
對象或特征的精確定位是一個檢測系統或由視覺引導的運動系統的重要功能。傳統的物體定位采用的是灰度值相關來識別物體。盡管這種技術得到了廣泛的應用,但是,它在圖象質量變差的情況下,就缺乏穩定性。圖象質量變差可能是由于凌亂、亮度不同和遮蓋等因素的影響。相反,幾何對象定位法是一種最新的方法,它使用對象的輪廓來識別對象及其特征。一個可靠的定位器可不需要夾具來定位零件,因此節約了成本。
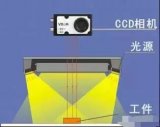
光學裝置與照明
眾所周知,適當的光學裝置和照明對視覺應用的成功至關重要。有時,盡管選擇了最合適的光學裝置和照明,但是,如果被監測的對象或特征稍微變動一下,就要求相應改變燈光和照明亮度。例如,晶片的拋光表面的不同,在OCR應用中激光蝕刻的標志的質量的不同。使用適當的軟件能讓你消除必要的調光操作,無論其圖象質量如何改變。
完整的工具集對綁在一起的多個工具
最終用戶的應用將決定是使用一套完整的視覺工具集還是使用眾多的特定的工具。視覺工具是一般的應用或算法,它能對圖象或圖象某個部分完成預定的任務。例如,一個斑點檢測工具可以找出一組暗的或亮的象素,并測量出這個斑點的各種尺寸。選擇一款視覺系統的重點在于擁有一套完整的視覺工具集。雖然你在作項目之初不需要所有的工具,但是,幾年之后你的要求就會改變,對新的應用就可能需要另外的工具。
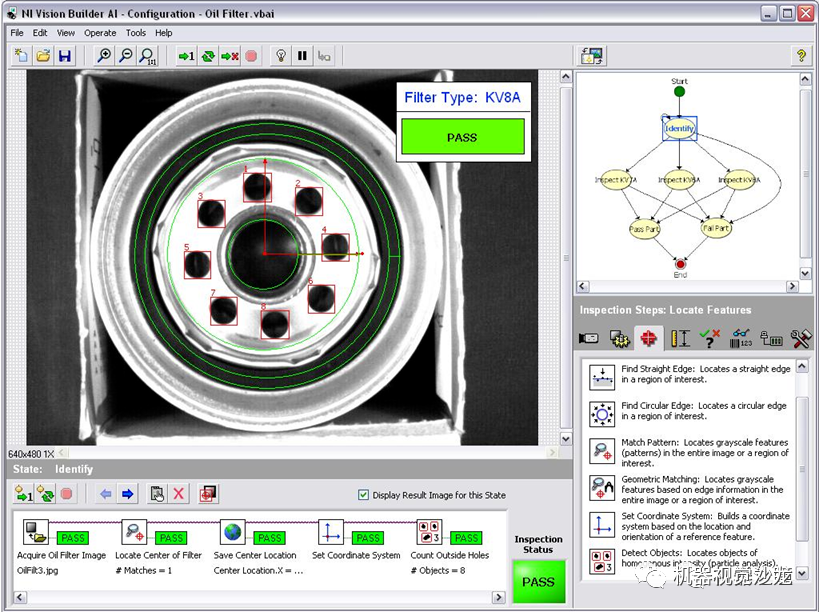
編程和操作方便

簡潔、直觀的圖形界面是容易使用和設置的關鍵。當今機器視覺產品之間的主要區別在于他們的圖形接口。接口應該從“設置”和“操作”這兩方面來評價。對一個工程師來講,它應該非常復雜,而對于一個操作者來說應非常簡單。例如,一個視覺系統的校準應該簡單得只點擊幾次鼠標,而不是象在火箭科學中的練習。
亞象素精度

視覺系統的分辨率是系統能分辨的最小特征,但實際上機器視覺算法具有亞象素的能力。也就是說,這些算法能夠測量或得出比一個象素更小的單位,視覺工具的亞象素精度取決于圖象的質量和算法的強大。
將來的升級
機器視覺系統可應用在各種場合,他們的應用范圍可從時髦的攝像機到監視系統。當選擇一個系統時應考慮系統將來的升級。幾種供應商提供的通用視覺軟件能為最終用戶配置合適的照明、光學系統和視覺工具。專用軟件包如BGA檢測、OCR等也可當作預先配置好的軟件出售。基于通用目的的視覺軟件系統更好升級。最終用戶應該根據附加的攝像機、照明的變化、視覺工具的變化等來考慮將來對系統的需求。例如,若一個需要多攝像頭的系統,就要對一個基于圖像捕捉卡的系統與一個基于時髦攝像機的系統的價格和靈活性進行對比。
圖象預處理
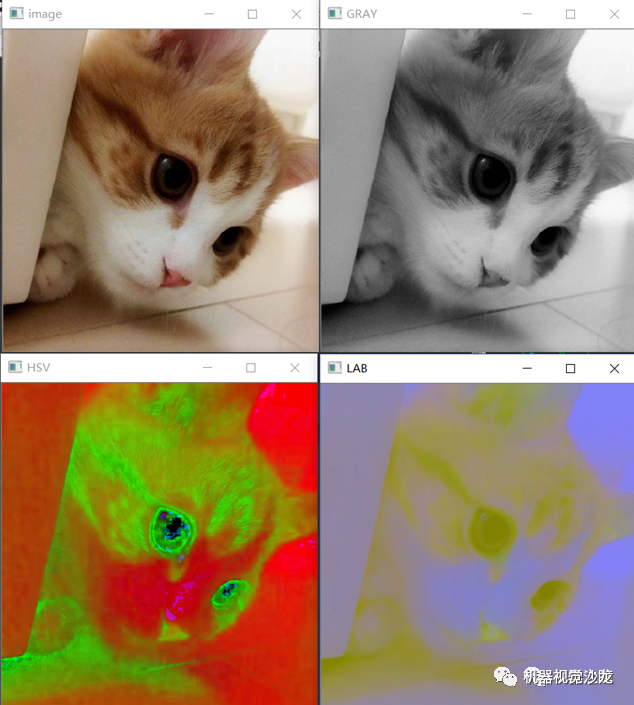
檢測特征點和缺陷是非常的重要,不管亮度和對象表面或材料不同。圖象預處理算法能把圖象的特征點放大,以使視覺工具能更好的檢測它們。同樣,特征點也能被縮小,以至視覺工具可忽略它們。與此相似,濾波操作可用于輸入圖象的卷積。可得到如此廣泛的預處理算法是復雜的視覺應用成功的關鍵。
視覺引導的運動

如果你的應用需要一個視覺系統來引導機器人,那么必須知道視覺系統與運動系統是如何集成的。對于校準和操作,沒集成的運動系統與視覺系統是初步的系統,機械人或機構和視覺系統是分開校準的。在操作中,一臺獨立的視覺系統根據在視覺坐標系統中的已知位置計算出零件位置的偏移量,然后發指令給機器人的手臂在離初始化編程的拾取位置的偏移量處拾取零件。相反,一個集成系統控制器能在一個坐標系統中校準視覺系統和機器人。零件定位然后可定義與在機器人編程的相同的六自由度坐標空間。
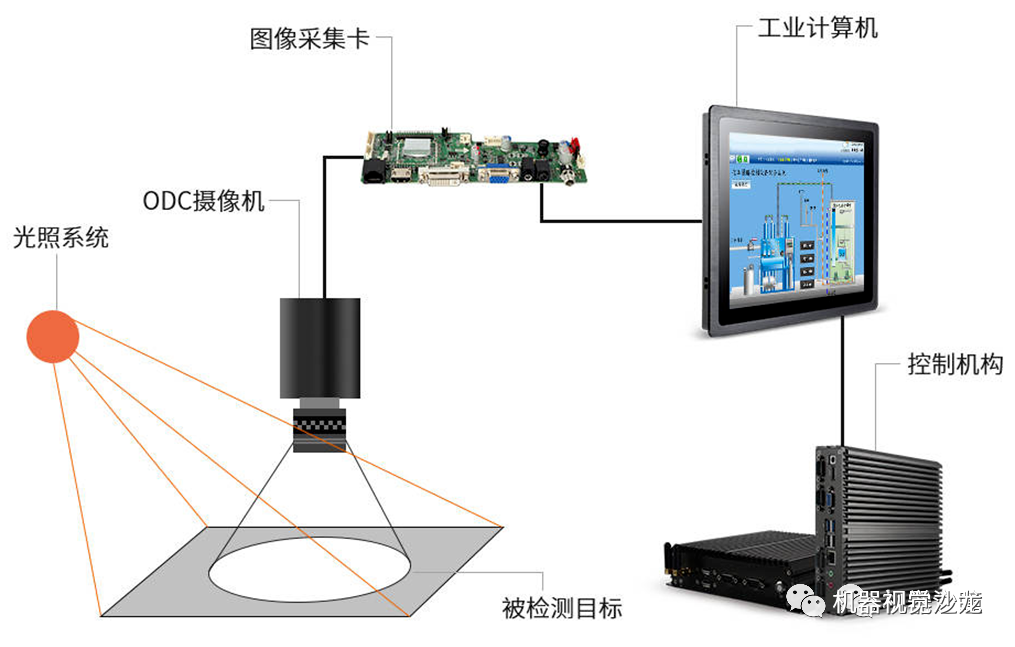
工廠層連接
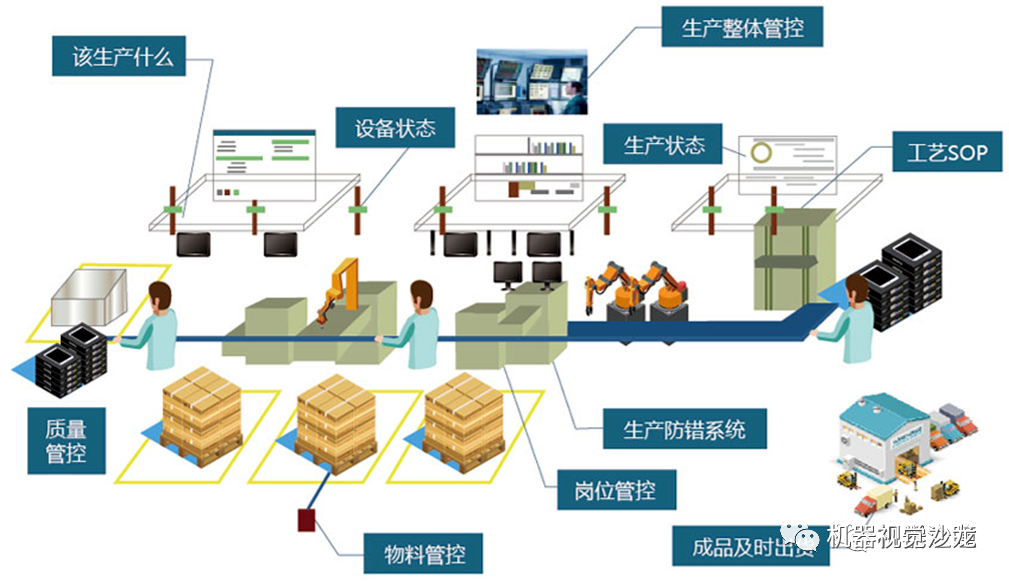
目前,有各種與視覺系統通訊的方法,通用的接口象串口(RS-232)、RS-485、并口、Ethernet、Devicenet、數字I/O等。更新的接口如IEEE-1394和USB也得到了廣泛的應用。當評估視覺系統時,要考慮工廠層的可連接性。典型地,機器視覺系統是一個與其它工廠層設備和工廠的信息系統接口的數據獲取系統。一些供應商的軟件能在局域網或因特網上對視覺系統進行遠程操作。在特定行業,如藥物,機器視覺系統對特定的應用被要求是獨立的,從而確保設置不受遠程操作的干擾。當選擇一款視覺系統時,視覺系統的通訊接口是一個重要的考慮,不應該被忽視。
-
檢測系統
+關注
關注
3文章
974瀏覽量
43843 -
機器視覺
+關注
關注
163文章
4526瀏覽量
122739 -
光學
+關注
關注
4文章
790瀏覽量
37144 -
圖象
+關注
關注
0文章
16瀏覽量
15206
原文標題:機器視覺知識要點
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
科天健:機器視覺照明要點
【下載】《機器人學、機器視覺與控制――MATLAB算法基礎》
【下載】《機器人學、機器視覺與控制――MATLAB算法基礎》
機器視覺照明的詳細要點概括
一文讓你搞懂機器視覺入門基礎知識
機器視覺基礎知識匯總






 工商網監
工商網監
評論