") PID算法推導(dǎo)+調(diào)試技巧+雙閉環(huán)控制+代碼仿真詳解
PID算法推導(dǎo)+調(diào)試技巧+雙閉環(huán)控制+代碼仿真詳解
正文
介紹
1.1 概述
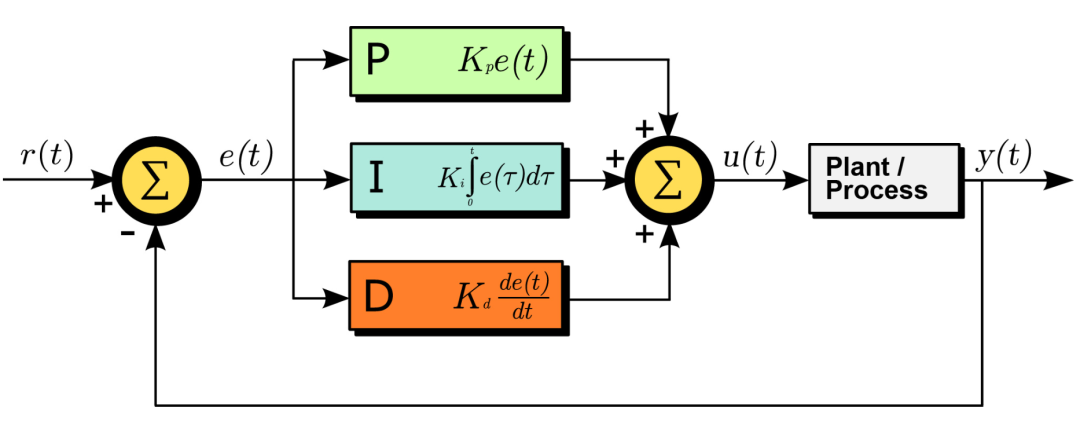
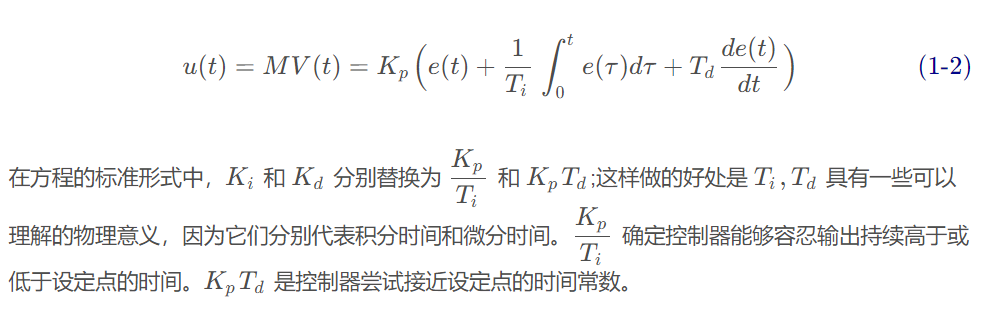
比例(Proportion)積分(Integral)微分(Differential)控制器(PID控制器或三項(xiàng)控制器)是一種采用反饋的控制回路機(jī)制,廣泛應(yīng)用于工業(yè)控制系統(tǒng)和需要連續(xù)調(diào)制控制的各種其他應(yīng)用。
PID控制器連續(xù)計(jì)算誤差值 e(t) 作為所需設(shè)定點(diǎn)(SP) 和測(cè)量過程變量(PV)之間的差值,并應(yīng)用基于比例、積分和導(dǎo)數(shù)項(xiàng)(分別表示為P、I和D)的校正,因此得名。
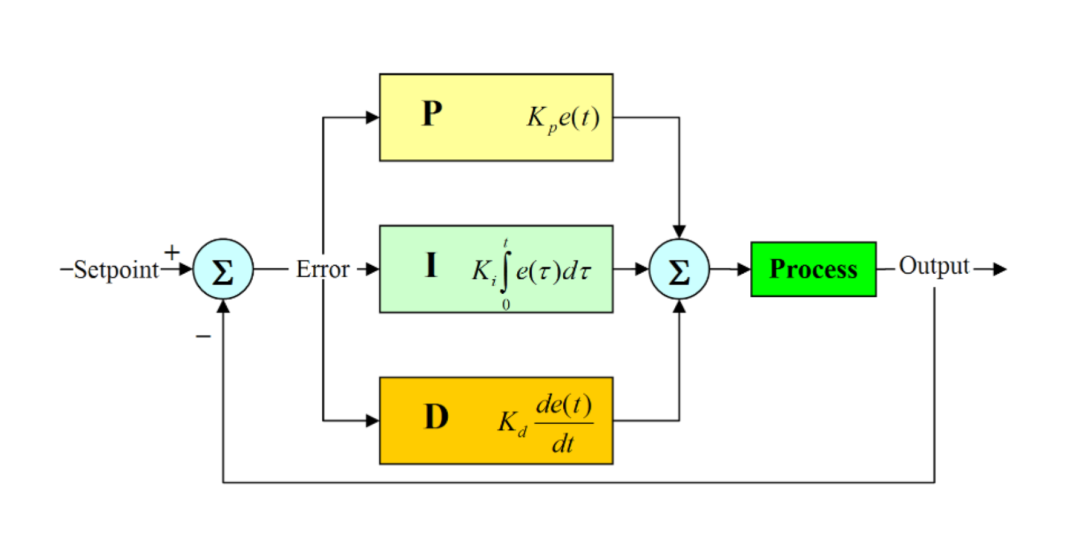
r(t) 是期望的過程值或設(shè)定點(diǎn)(SP),y(t) 是測(cè)量的過程值(PV)。
1.2 歷史發(fā)展
1911年,第一個(gè)PID控制器是由Elmer Sperry開發(fā)的。
1922 年,俄裔美國(guó)工程師尼古拉斯·米諾斯基 ( Nicolas Minorsky)才首次利用理論分析制定了我們現(xiàn)在所說的 PID 或三項(xiàng)控制的正式控制律。米諾斯基當(dāng)時(shí)正在為美國(guó)海軍研究和設(shè)計(jì)自動(dòng)船舶轉(zhuǎn)向系統(tǒng),他的分析基于對(duì)舵手的觀察。
他指出,舵手不僅根據(jù)當(dāng)前航向誤差,還根據(jù)過去的誤差以及當(dāng)前的變化率來駕駛船舶;然后 Minorsky 對(duì)此進(jìn)行了數(shù)學(xué)處理。他的目標(biāo)是穩(wěn)定,而不是一般控制,這大大簡(jiǎn)化了問題。
1933年,TIC(泰勒儀器公司)實(shí)現(xiàn)了完全可調(diào)節(jié)的前氣動(dòng)控制器。幾年后,控制工程師通過將末端返回到一些假值,直到誤差不為零,消除了比例控制器中發(fā)現(xiàn)的穩(wěn)態(tài)誤差。這個(gè)返回包含了誤差,這被稱為比例積分控制器。
1940年,第一個(gè)氣動(dòng)PID控制器通過導(dǎo)數(shù)動(dòng)作開發(fā),以減少超調(diào)問題。
1942年,Ziegler & Nichols引入了調(diào)諧規(guī)則,由工程師發(fā)現(xiàn)和設(shè)置PID控制器的合適參數(shù)。
20世紀(jì)50年代中期,自動(dòng)PID控制器在工業(yè)上得到了廣泛的應(yīng)用。工業(yè)中大多數(shù)現(xiàn)代 PID 控制都是作為DCS、PLC 或單片機(jī)程序來實(shí)現(xiàn)的。
1.3 應(yīng)用
?火箭的姿態(tài)控制
?無(wú)人機(jī)懸停控制等
?相機(jī)穩(wěn)定器、相機(jī)云臺(tái)
?平衡小車
?汽車的定速巡航控制、轉(zhuǎn)向控制
?發(fā)動(dòng)機(jī)轉(zhuǎn)速控制
?3D打印機(jī)上的溫度控制器
?工業(yè)自動(dòng)化領(lǐng)域,大約95%的閉環(huán)操作使用PID控制器。
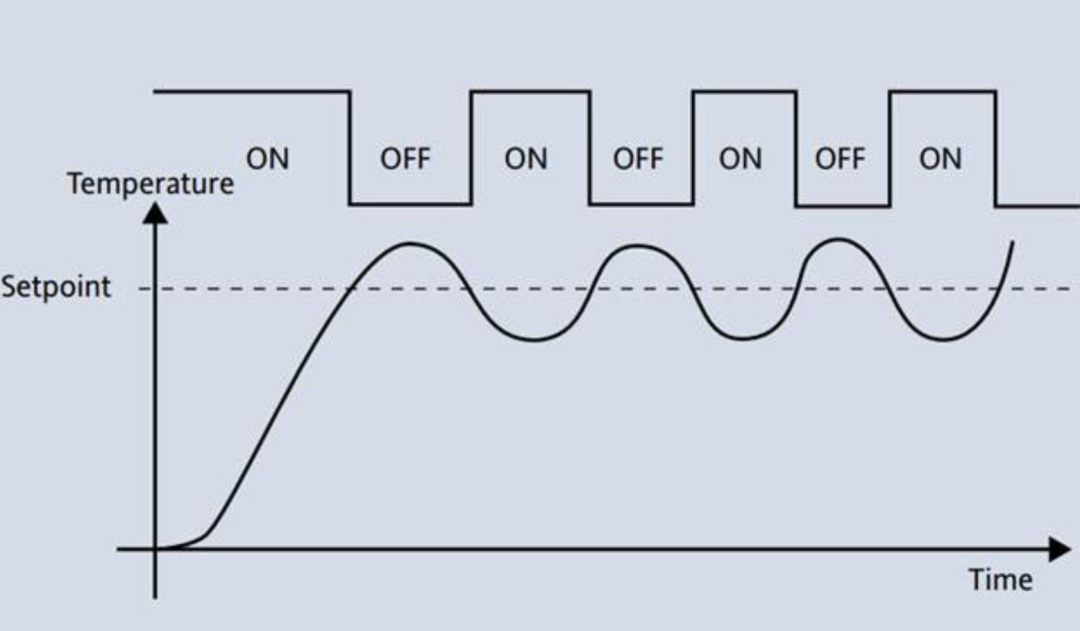
1.4 與 ON/OFF 型控制器對(duì)比
像PID控制器這樣的閉環(huán)系統(tǒng)包括一個(gè)反饋控制系統(tǒng)。該系統(tǒng)利用一個(gè)固定點(diǎn)對(duì)反饋?zhàn)兞窟M(jìn)行評(píng)估,從而產(chǎn)生誤差信號(hào)。在此基礎(chǔ)上,它改變系統(tǒng)輸出。這個(gè)過程將繼續(xù),直到誤差達(dá)到零,否則反饋?zhàn)兞康闹稻偷扔谝粋€(gè)固定點(diǎn)。
與ON/OFF型控制器相比,該控制器提供了良好的效果。在開/關(guān)型控制器中,只需兩個(gè)條件即可管理系統(tǒng)。大多數(shù)暖通空調(diào)系統(tǒng)、冰箱都采用這種方法。
例如,在冰箱中,它會(huì)冷卻內(nèi)部直到達(dá)到所需溫度,然后關(guān)閉冷卻器,直到達(dá)到高于所需溫度的設(shè)定值。一旦工藝值低于固定點(diǎn),則開啟。
類似地,一旦該值高于固定值,它將關(guān)閉。這種控制器的輸出不穩(wěn)定,在不動(dòng)點(diǎn)的區(qū)域內(nèi)振蕩頻繁。然而,與ON/OFF型控制器相比,PID 控制器更加穩(wěn)定和準(zhǔn)確。
1.6 響應(yīng)類型
由PID控制器驅(qū)動(dòng)的系統(tǒng)通常具有三種類型的響應(yīng):欠阻尼、過阻尼和臨界阻尼。
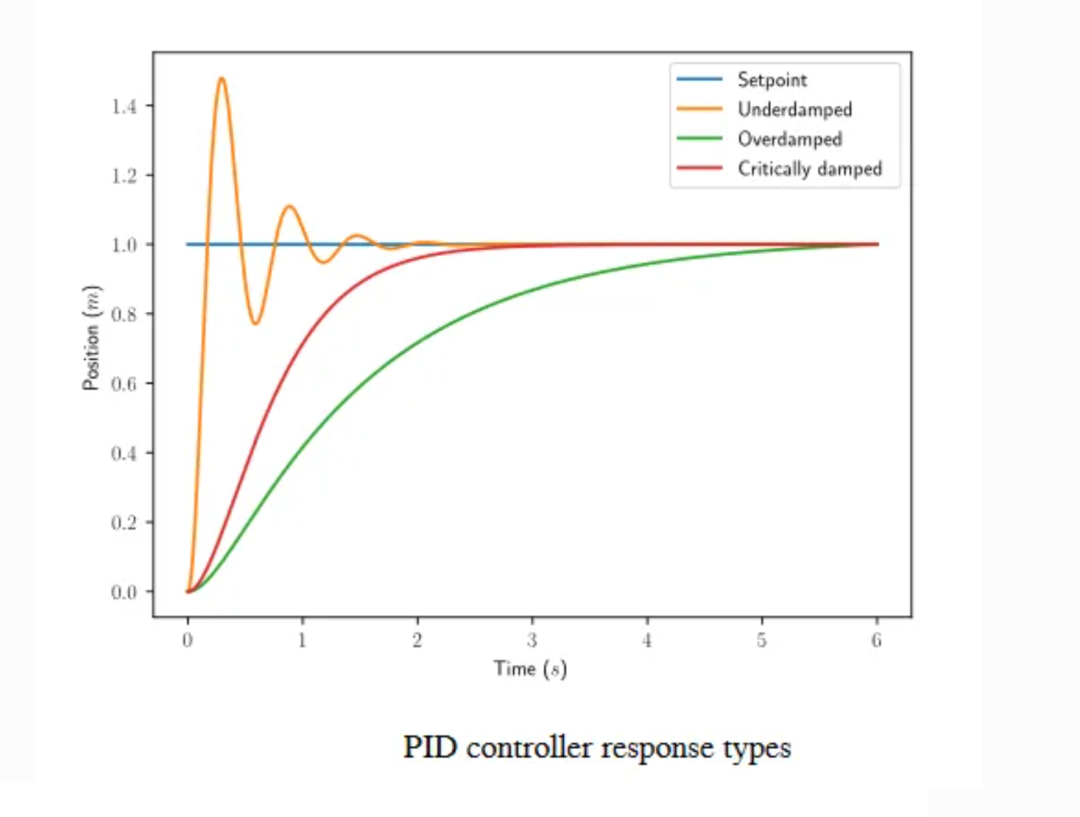
?欠阻尼響應(yīng)在穩(wěn)定之前圍繞參考值振蕩。
?過阻尼響應(yīng)上升緩慢并且不會(huì)超過參考值。
?臨界阻尼響應(yīng)具有最快的上升時(shí)間,且不會(huì)超過參考值。
公式
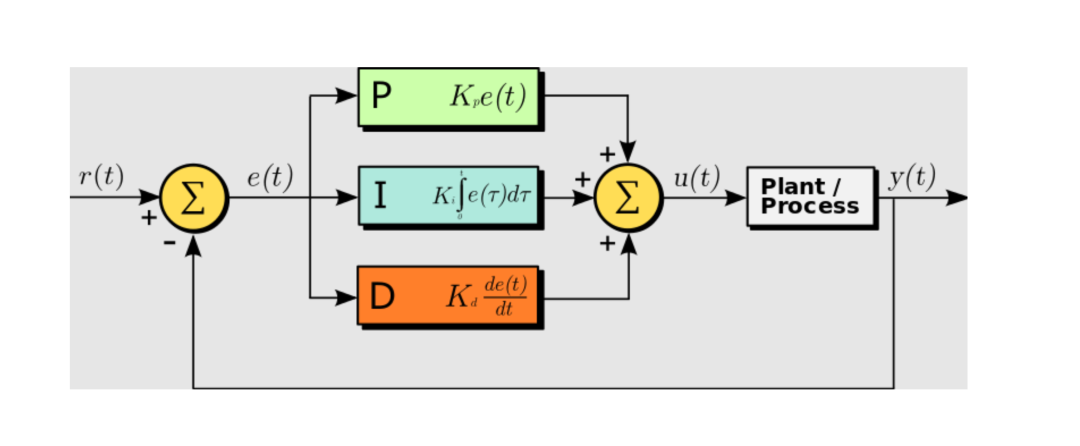
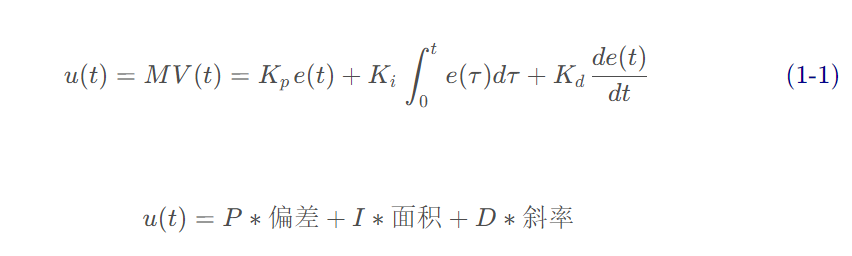
2.1 PID 系統(tǒng)定義與公式
r(t) setpoint, reference,是期望的過程值或設(shè)定值(SP);
y(t) output, process variable,是測(cè)量的過程值,輸出值(PV);
e(t) error,是偏差;
u(t) control effort,是控制量;
PID控制器的顯著特點(diǎn)是能夠利用比例、積分和微分這三個(gè)控制項(xiàng)對(duì)控制器輸出的影響來進(jìn)行精確和最優(yōu)的控制。
PID 控制器,不斷計(jì)算誤差值e(t) 作為所需設(shè)定點(diǎn)之間的差異SP=r(t) 和測(cè)量的過程變量PV=y(t):e(t)=r(t)?y(t) ,并應(yīng)用基于比例、積分和導(dǎo)數(shù)項(xiàng)的修正。
控制器嘗試通過調(diào)整控制變量來最小化隨時(shí)間變化的誤差u(t)。manipulated variable (MV)。
2.2 PID 數(shù)字公式
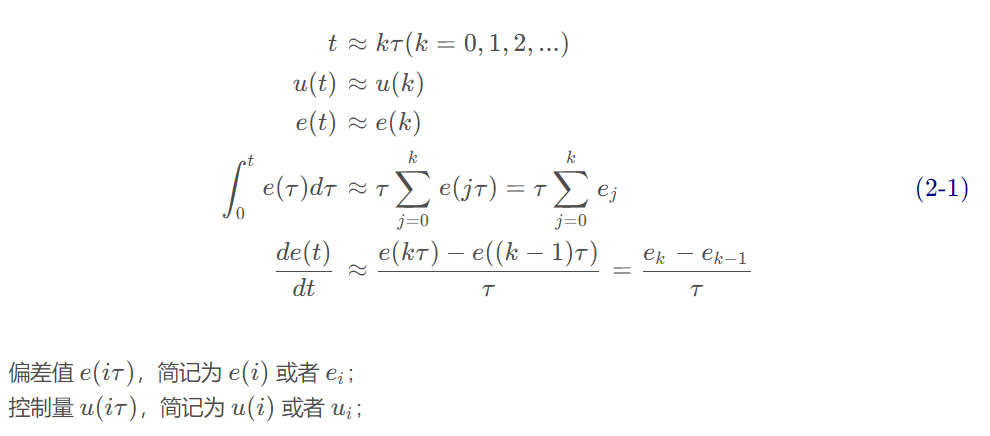
由于計(jì)算機(jī)控制是一種采樣控制,它只能根據(jù)采樣時(shí)刻的偏差計(jì)算控制量,而不能像模擬控制那樣連續(xù)輸出控制量,進(jìn)行連續(xù)控制。由于這一特點(diǎn),(式 1-1)中的積分項(xiàng)和微分項(xiàng)不能直接使用,必須進(jìn)行離散化處理。
離散化處理的方法為:以τ作為采樣周期,k作為采樣序號(hào),則離散采樣時(shí)間kτ對(duì)應(yīng)著連續(xù)時(shí)間t,用矩形法數(shù)值積分近似代替積分,用一階后向差分近似代替微分,可作如下近似變換:
2.3 位置式 PID 算法
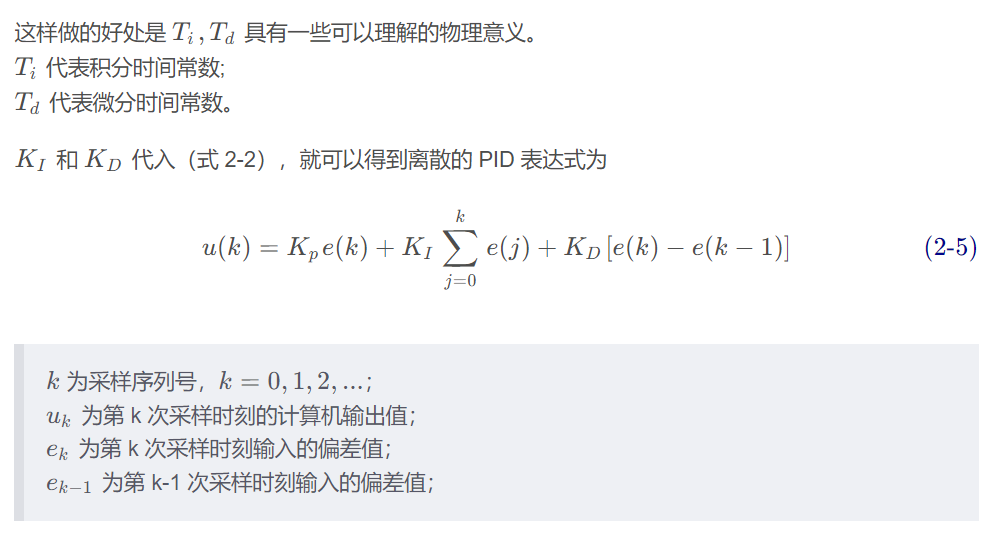
將(式 2-1)代入(式 1-1),就可以得到離散的 PID 表達(dá)式為

將(式 2-1)代入(式 1-2),就可以得到離散的PID 表達(dá)式為

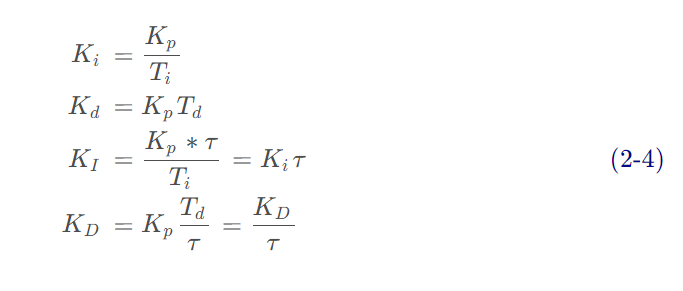
積分系數(shù)、微分系數(shù)做如下替換:
注意:必須使τ為定值,或者變化小到可以忽略,這樣P、I、D才是固定常數(shù),才可能調(diào)節(jié)
2.4 增量式 PID 算法

增量式 PID 控制算法可以通過(式 2-2)推導(dǎo)出。由(式 2-2)可以得到控制器的第 k-1 個(gè)采樣時(shí)刻的輸出值為:

由(式 2-3)可以得到控制器的第 k-1 個(gè)采樣時(shí)刻的輸出值為:

用(式 2-3)減去(式 2-7)相減并整理,就可以得到增量式 PID 控制算法公式:

由(式 2-8)可以看出,如果計(jì)算機(jī)控制系統(tǒng)采用恒定的采樣周期τ,一旦確定 A、 B、 C,只要使用前后三次測(cè)量的偏差值,就可以由(式 2-8)求出控制量。
增量式 PID 控制算法與位置式 PID 算法(式 2-3)相比,只需要保持當(dāng)前時(shí)刻以前三個(gè)時(shí)刻的偏差值即可,累計(jì)誤差較小,計(jì)算量小的多,因此在實(shí)際中得到廣泛的應(yīng)用。
而位置式 PID 控制算法也可以通過增量式控制算法推出遞推計(jì)算公式:

(式 2-9)就是目前在計(jì)算機(jī)控制中廣泛應(yīng)用的數(shù)字遞推 PID 控制算法。
調(diào)試技巧
代碼實(shí)現(xiàn)
import numpy as np
import matplotlib.pyplot as plt
class PositionPID(object):
"""位置式PID算法實(shí)現(xiàn)"""
def __init__(self, target, cur_val, dt, max, min, p, i, d) -> None:
self.dt = dt # 循環(huán)時(shí)間間隔
self._max = max # 最大輸出限制,規(guī)避過沖
self._min = min # 最小輸出限制
self.k_p = p # 比例系數(shù)
self.k_i = i # 積分系數(shù)
self.k_d = d # 微分系數(shù)
self.target = target # 目標(biāo)值
self.cur_val = cur_val # 算法當(dāng)前PID位置值,第一次為設(shè)定的初始位置
self._pre_error = 0 # t-1 時(shí)刻誤差值
self._integral = 0 # 誤差積分值
def calculate(self):
"""
計(jì)算t時(shí)刻PID輸出值cur_val
"""
error = self.target - self.cur_val # 計(jì)算當(dāng)前誤差
# 比例項(xiàng)
p_out = self.k_p * error
# 積分項(xiàng)
self._integral += (error * self.dt)
i_out = self.k_i * self._integral
# 微分項(xiàng)
derivative = (error - self._pre_error) / self.dt
d_out = self.k_d * derivative
# t 時(shí)刻pid輸出
output = p_out + i_out + d_out
# 限制輸出值
if output > self._max:
output = self._max
elif output < self._min:
? ? ? ? ? ?output = self._min
? ? ? ?
? ? ? ?self._pre_error = error
? ? ? ?self.cur_val = output
? ? ? ?return self.cur_val
? ?def fit_and_plot(self, count = 200):
? ? ? ?"""
? ? ? ?使用PID擬合setPoint
? ? ? ?"""
? ? ? ?counts = np.arange(count)
? ? ? ?outputs = []
? ? ? ?for i in counts:
? ? ? ? ? ?outputs.append(self.calculate())
? ? ? ? ? ?print('Count %3d: output: %f' % (i, outputs[-1]))
? ? ? ?print('Done')
? ? ? ?# print(outputs)
? ? ? ?
? ? ? ?plt.figure()
? ? ? ?plt.axhline(self.target, c='red')
? ? ? ?plt.plot(counts, np.array(outputs), 'b.')
? ? ? ?plt.ylim(min(outputs) - 0.1 * min(outputs), max(outputs) + 0.1 * max(outputs))
? ? ? ?plt.plot(outputs)
? ? ? ?plt.show()
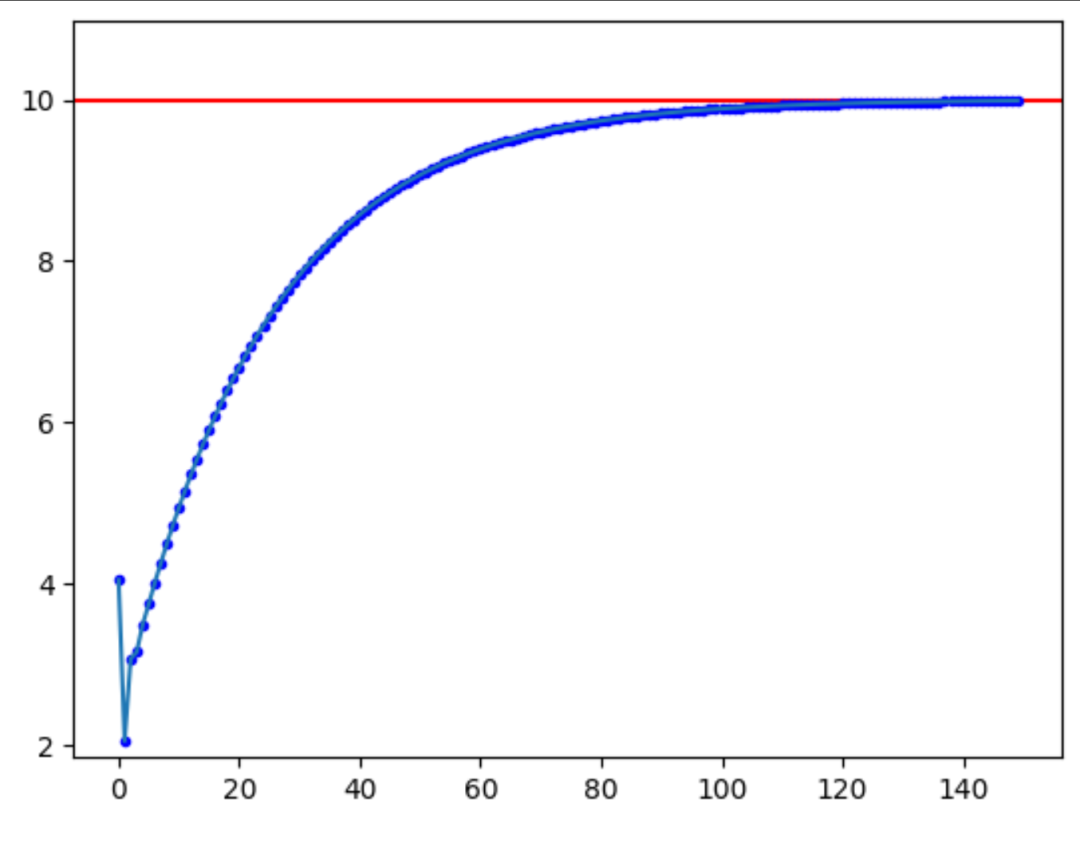
pid = PositionPID(10, -5, 0.5, 100, -100, 0.2, 0.1, 0.01)
pid.fit_and_plot(150)
c/c++
//首先定義PID結(jié)構(gòu)體用于存放一個(gè)PID的數(shù)據(jù)
typedef struct
{
float kp,ki,kd;//三個(gè)系數(shù)
float error,lastError;//誤差、上次誤差
float integral,maxIntegral;//積分、積分限幅
float output,maxOutput;//輸出、輸出限幅
}PID;
//用于初始化pid參數(shù)的函數(shù)
void PID_Init(PID *pid,float p,float i,float d,float maxI,float maxOut)
{
pid->kp=p;
pid->ki=i;
pid->kd=d;
pid->maxIntegral=maxI;
pid->maxOutput=maxOut;
}
//進(jìn)行一次pid計(jì)算
//參數(shù)為(pid結(jié)構(gòu)體,目標(biāo)值,反饋值),計(jì)算結(jié)果放在pid結(jié)構(gòu)體的output成員中
void PID_Calc(PID *pid,float reference,float feedback)
{
//更新數(shù)據(jù)
pid->lastError=pid->error;//將舊error存起來
pid->error=reference-feedback;//計(jì)算新error
//計(jì)算微分
float dout=(pid->error-pid->lastError)*pid->kd;
//計(jì)算比例
float pout=pid->error*pid->kp;
//計(jì)算積分
pid->integral+=pid->error*pid->ki;
//積分限幅
if(pid->integral > pid->maxIntegral) pid->integral=pid->maxIntegral;
else if(pid->integral < -pid->maxIntegral) pid->integral=-pid->maxIntegral;
//計(jì)算輸出
pid->output=pout+dout+pid->integral;
//輸出限幅
if(pid->output > pid->maxOutput) pid->output=pid->maxOutput;
else if(pid->output < -pid->maxOutput) pid->output=-pid->maxOutput;
}
PID mypid;//創(chuàng)建一個(gè)PID結(jié)構(gòu)體變量
int main()
{
//...這里有些其他初始化代碼
PID_Init(&mypid,10,1,5,800,1000);//初始化PID參數(shù)
while(1)//進(jìn)入循環(huán)運(yùn)行
{
float feedbackValue=...;//這里獲取到被控對(duì)象的反饋值
float targetValue=...;//這里獲取到目標(biāo)值
PID_Calc(&mypid,targetValue,feedbackValue);//進(jìn)行PID計(jì)算,結(jié)果在output成員變量中
設(shè)定執(zhí)行器輸出大小(mypid.output);
delay(10);//等待一定時(shí)間再開始下一次循環(huán)
}
}
單環(huán)效果
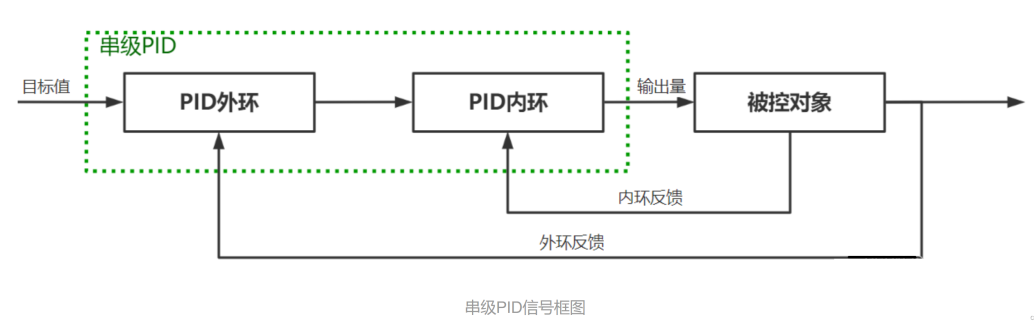
串級(jí)PID的C語(yǔ)言代碼
//此處需要插入上面的單級(jí)PID相關(guān)代碼
//串級(jí)PID的結(jié)構(gòu)體,包含兩個(gè)單級(jí)PID
typedef struct
{
PID inner;//內(nèi)環(huán)
PID outer;//外環(huán)
float output;//串級(jí)輸出,等于inner.output
}CascadePID;
//串級(jí)PID的計(jì)算函數(shù)
//參數(shù)(PID結(jié)構(gòu)體,外環(huán)目標(biāo)值,外環(huán)反饋值,內(nèi)環(huán)反饋值)
void PID_CascadeCalc(CascadePID *pid,float outerRef,float outerFdb,float innerFdb)
{
PID_Calc(&pid->outer,outerRef,outerFdb);//計(jì)算外環(huán)
PID_Calc(&pid->inner,pid->outer.output,innerFdb);//計(jì)算內(nèi)環(huán)
pid->output=pid->inner.output;//內(nèi)環(huán)輸出就是串級(jí)PID的輸出
}
CascadePID mypid;//創(chuàng)建串級(jí)PID結(jié)構(gòu)體變量
int main()
{
//...其他初始化代碼
PID_Init(&mypid.inner,10,0,0,0,1000);//初始化內(nèi)環(huán)參數(shù)
PID_Init(&mypid.outer,5,0,5,0,100);//初始化外環(huán)參數(shù)
while(1)//進(jìn)入循環(huán)運(yùn)行
{
float outerTarget=...;//獲取外環(huán)目標(biāo)值
float outerFeedback=...;//獲取外環(huán)反饋值
float innerFeedback=...;//獲取內(nèi)環(huán)反饋值
PID_CascadeCalc(&mypid,outerTarget,outerFeedback,innerFeedback);//進(jìn)行PID計(jì)算
設(shè)定執(zhí)行機(jī)構(gòu)輸出大小(mypid.output);
delay(10);//延時(shí)一段時(shí)間
}
}
雙環(huán)效果
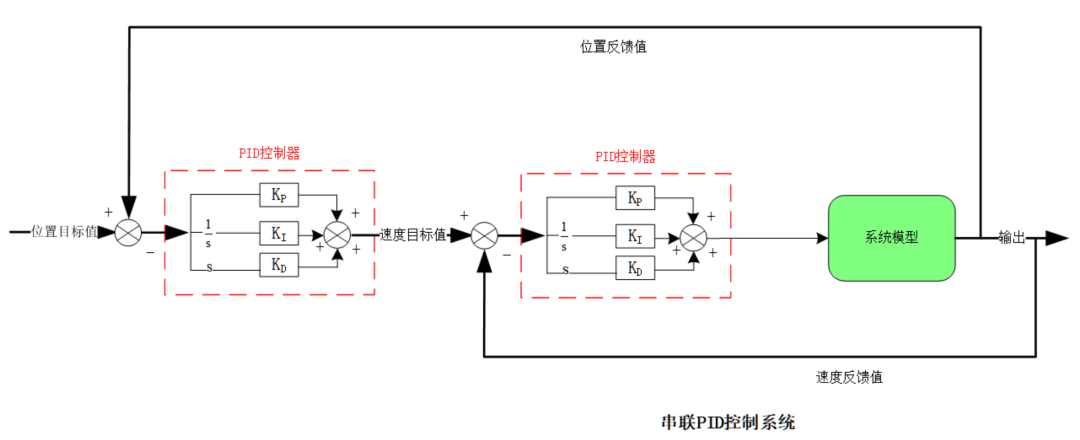
雙環(huán)控制
串聯(lián)
如果電機(jī)控制既要控制速度又要控制位置,因?yàn)樗俣群臀恢孟嚓P(guān),所以需要串聯(lián)。
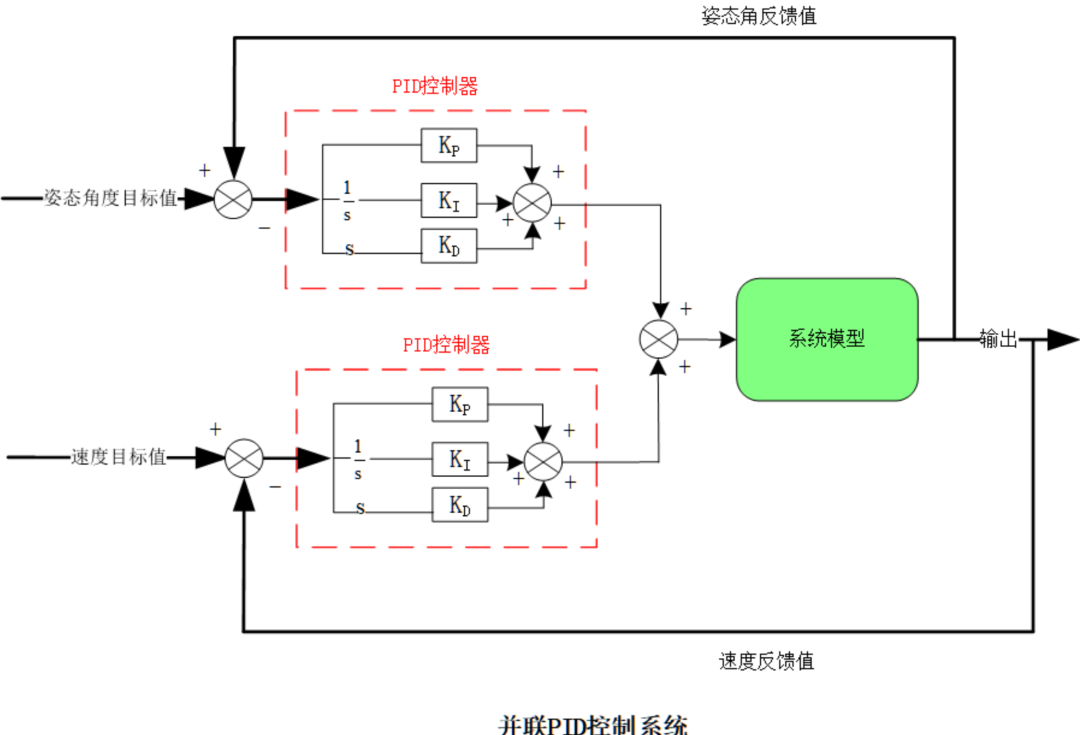
并聯(lián)
姿態(tài)角度與速度間無(wú)相關(guān)性,各自單獨(dú)算一路控制
示例
循跡小車
可見小車的循跡效果。
野火中步進(jìn)電機(jī)位置速度雙環(huán)控制
步進(jìn)電機(jī)速度環(huán)控制實(shí)現(xiàn)和 10. 步進(jìn)電機(jī)位置環(huán)控制實(shí)現(xiàn)介紹了單環(huán)控制已經(jīng)能很好地提高電機(jī)的性能了,但是仍有其局限性。
使用速度環(huán)精確控制了電機(jī)的轉(zhuǎn)速,但是停止的位置難以精確控制;
使用位置環(huán)精確控制了電機(jī)轉(zhuǎn)過的角度,卻不得不人為限制速度來防止堵轉(zhuǎn)。
位置環(huán)和速度環(huán)雙環(huán)控制,既實(shí)現(xiàn)位置的精確調(diào)節(jié)又實(shí)現(xiàn)速度的自動(dòng)控制。
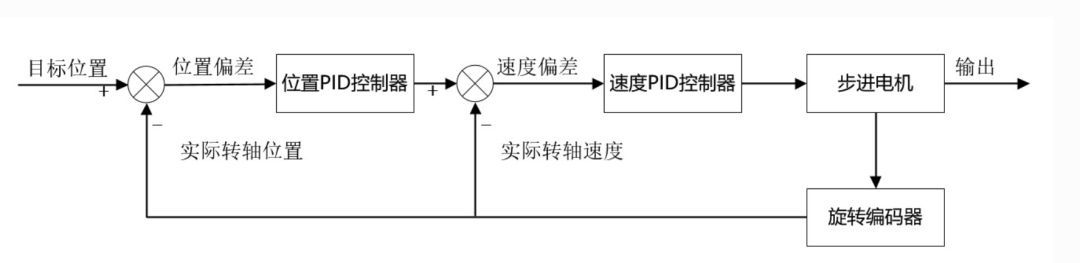
該控制下,編碼器不僅起到了反饋位置的作用,也起到了反饋速度的作用。
調(diào)參技巧:在PID參數(shù)整定時(shí),采取先內(nèi)環(huán)再外環(huán)的方法,也就是先單獨(dú)使用速度環(huán)控制,得到滿意的參數(shù)后, 再把位置環(huán)套在外面,整定位置環(huán)參數(shù),最后根據(jù)整體效果對(duì)速度環(huán)參數(shù)進(jìn)行微調(diào)。
bsp_pid.h
/*pid*/
typedef struct
{
float target_val; //目標(biāo)值
float actual_val; //實(shí)際值
float err; //定義當(dāng)前偏差值
float err_next; //定義下一個(gè)偏差值
float err_last; //定義上一個(gè)偏差值
float Kp, Ki, Kd; //定義比例、積分、微分系數(shù)
}_pid;
bsp_stepper_ctrl.h
/*宏定義*/
/*******************************************************/
#define TIM_STEP_FREQ (SystemCoreClock/TIM_PRESCALER) // 頻率ft值
/*電機(jī)單圈參數(shù)*/
#define STEP_ANGLE 1.8f //步進(jìn)電機(jī)的步距角 單位:度
#define FSPR (360.0f/STEP_ANGLE) //步進(jìn)電機(jī)的一圈所需脈沖數(shù)
#define MICRO_STEP 32 //細(xì)分器細(xì)分?jǐn)?shù)
#define SPR (FSPR*MICRO_STEP) //細(xì)分后一圈所需脈沖數(shù)
#define PULSE_RATIO (float)(SPR/ENCODER_TOTAL_RESOLUTION)//步進(jìn)電機(jī)單圈脈沖數(shù)與編碼器單圈脈沖的比值
#define SAMPLING_PERIOD 50 //PID采樣頻率,單位Hz
#define MOVE_CTRL 0.1f //啟用速度環(huán)控制量
#define TARGET_DISP 20 //步進(jìn)電機(jī)運(yùn)動(dòng)時(shí)的目標(biāo)圈數(shù),單位:轉(zhuǎn)
#define TARGET_SPEED_MAX 800 // 目標(biāo)速度的最大值
typedef struct {
unsigned char stepper_dir : 1; //步進(jìn)電機(jī)方向
unsigned char stepper_running : 1; //步進(jìn)電機(jī)運(yùn)行狀態(tài)
unsigned char MSD_ENA : 1; //驅(qū)動(dòng)器使能狀態(tài)
}__SYS_STATUS;
bsp_stepper_ctrl.c-增量式PID算法實(shí)現(xiàn)-增量式PID
/** * @brief 增量式PID算法實(shí)現(xiàn) * @param val:當(dāng)前實(shí)際值 * @note 無(wú) * @retval 通過PID計(jì)算后的輸出 */ float PID_realize(_pid *pid, float temp_val) { /*傳入實(shí)際值*/ pid->actual_val = temp_val; /*計(jì)算目標(biāo)值與實(shí)際值的誤差*/ pid->err=pid->target_val-pid->actual_val; /*PID算法實(shí)現(xiàn)*/ float increment_val = pid->Kp*(pid->err - pid->err_next) + pid->Ki*pid->err + pid->Kd*(pid->err - 2 * pid->err_next + pid->err_last); /*傳遞誤差*/ pid->err_last = pid->err_next; pid->err_next = pid->err; /*返回增量值*/ return increment_val; }
bsp_stepper_ctrl.c-步進(jìn)電機(jī)位置速度雙閉環(huán)控制
/** * @brief 步進(jìn)電機(jī)位置速度雙閉環(huán)控制 * @retval 無(wú) * @note 基本定時(shí)器中斷內(nèi)調(diào)用 */ void Stepper_Ctrl(void) { /* 編碼器相關(guān)變量 */ static __IO float last_count = 0; __IO float capture_count = 0; __IO float capture_per_unit = 0; /* 經(jīng)過pid計(jì)算后的期望值 */ static __IO float speed_cont_val = 0.0f; static __IO float move_cont_val = 0.0f; static int cont_val = 0; /* 當(dāng)電機(jī)運(yùn)動(dòng)時(shí)才啟動(dòng)pid計(jì)算 */ if((sys_status.MSD_ENA == 1) && (sys_status.stepper_running == 1)) { /* 計(jì)算編碼器脈沖數(shù) */ capture_count = (int)__HAL_TIM_GET_COUNTER(&TIM_EncoderHandle) + (encoder_overflow_count * ENCODER_TIM_PERIOD); /* 計(jì)算速度環(huán)的傳入值 */ capture_per_unit = capture_count - last_count; last_count = capture_count; /* 編碼器脈沖累計(jì)值作為實(shí)際值傳入位置環(huán)pid控制器 */ move_cont_val += PID_realize_move(&move_pid, (float)capture_count);// 進(jìn)行 PID 計(jì)算 /* 判斷運(yùn)動(dòng)方向 */ move_cont_val > 0 ? (MOTOR_DIR(CW)) : (MOTOR_DIR(CCW)); /* 判斷是否啟用速度環(huán) */ if (fabsf(move_cont_val) >= MOVE_CTRL) { /* 傳遞位置環(huán)計(jì)算值,便于計(jì)算*/ cont_val = move_cont_val; /* 目標(biāo)速度上限處理 */ if (cont_val > TARGET_SPEED_MAX) { cont_val = TARGET_SPEED_MAX; } else if (cont_val < -TARGET_SPEED_MAX) ? ? ? { ? ? ? ? cont_val = -TARGET_SPEED_MAX; ? ? ? } #if defined(PID_ASSISTANT_EN) ? ? ? int32_t temp = cont_val; ? ? ? set_computer_value(SEED_TARGET_CMD, CURVES_CH2, &temp, 1); ? ? // 給通道 2 發(fā)送目標(biāo)值 #endif ? ? ? /* 設(shè)定速度的目標(biāo)值 */ ? ? ? set_pid_target(&speed_pid, cont_val); ? ? ? /* 單位時(shí)間內(nèi)的編碼器脈沖數(shù)作為實(shí)際值傳入速度環(huán)pid控制器 */ ? ? ? speed_cont_val += PID_realize_speed(&speed_pid, (float)capture_per_unit);// 進(jìn)行 PID 計(jì)算 ? ? ? /* 由于OC_Pulse_num為uint16_t變量,取速度環(huán)輸出值的絕對(duì)值進(jìn)行后續(xù)計(jì)算*/ ? ? ? cont_val = fabsf(speed_cont_val); ? ? ? /* 計(jì)算比較計(jì)數(shù)器的值 */ ? ? ? OC_Pulse_num = ((uint16_t)(TIM_STEP_FREQ / (cont_val * PULSE_RATIO * SAMPLING_PERIOD))) >> 1; } else { /* 計(jì)算比較計(jì)數(shù)器的值 */ OC_Pulse_num = ((uint16_t)(TIM_STEP_FREQ / ((float)move_cont_val * PULSE_RATIO))) >> 1; } #if PID_ASSISTANT_EN int Temp_ch2 = capture_per_unit; // 上位機(jī)需要整數(shù)參數(shù),轉(zhuǎn)換一下 int Temp_ch1 = capture_count; set_computer_value(SEED_FACT_CMD, CURVES_CH2, &Temp_ch2, 1); // 給通道 1 發(fā)送實(shí)際值 // 給通道 2 發(fā)送實(shí)際值 set_computer_value(SEED_FACT_CMD, CURVES_CH1, &Temp_ch1, 1); // 給通道 1 發(fā)送實(shí)際值 #else printf("實(shí)際值:%d,目標(biāo)值:%.0f ", capture_per_unit, pid.target_val);// 打印實(shí)際值和目標(biāo)值 #endif } else { /*停機(jī)狀態(tài)所有參數(shù)清零*/ last_count = 0; speed_cont_val = 0; move_cont_val = 0; speed_pid.actual_val = 0; speed_pid.err = 0; speed_pid.err_last = 0; speed_pid.err_next = 0; move_pid.actual_val = 0; move_pid.err = 0; move_pid.err_last = 0; move_pid.err_next = 0; } }
main
/**
* @brief 主函數(shù)
* @param 無(wú)
* @retval 無(wú)
*/
int main(void)
{
/* 初始化系統(tǒng)時(shí)鐘為168MHz */
SystemClock_Config();
/*初始化USART 配置模式為 115200 8-N-1,中斷接收*/
DEBUG_USART_Config();
printf("歡迎使用野火 電機(jī)開發(fā)板 步進(jìn)電機(jī)位置速度雙環(huán)控制 例程
");
printf("按下按鍵3啟動(dòng)和停止電機(jī)
");
/* 初始化時(shí)間戳 */
HAL_InitTick(5);
/*按鍵中斷初始化*/
Key_GPIO_Config();
/*led初始化*/
LED_GPIO_Config();
/* 初始化基本定時(shí)器定時(shí),20ms產(chǎn)生一次中斷 */
TIMx_Configuration();
/* 編碼器接口初始化 */
Encoder_Init();
/*步進(jìn)電機(jī)初始化*/
stepper_Init();
/* 上電默認(rèn)停止電機(jī) */
Set_Stepper_Stop();
/* PID算法參數(shù)初始化 */
PID_param_init();
// MOTOR_DIR(CW);
/* 目標(biāo)位置轉(zhuǎn)換為編碼器的脈沖數(shù)作為pid目標(biāo)值 */
move_pid.target_val = TARGET_DISP * ENCODER_TOTAL_RESOLUTION;
int32_t Temp = TARGET_DISP * ENCODER_TOTAL_RESOLUTION;
#if PID_ASSISTANT_EN
set_computer_value(SEED_STOP_CMD, CURVES_CH1, NULL, 0); // 同步上位機(jī)的啟動(dòng)按鈕狀態(tài)
set_computer_value(SEED_TARGET_CMD, CURVES_CH1, &Temp, 1);// 給通道 1 發(fā)送目標(biāo)值
#endif
while(1)
{
/* 掃描KEY1,啟動(dòng)電機(jī) */
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
#if PID_ASSISTANT_EN
Set_Stepper_Start();
set_computer_value(SEED_START_CMD, CURVES_CH1, NULL, 0);// 同步上位機(jī)的啟動(dòng)按鈕狀態(tài)
#else
Set_Stepper_Start();
#endif
}
/* 掃描KEY2,停止電機(jī) */
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
#if PID_ASSISTANT_EN
Set_Stepper_Stop();
set_computer_value(SEED_STOP_CMD, CURVES_CH1, NULL, 0);// 同步上位機(jī)的啟動(dòng)按鈕狀態(tài)
#else
Set_Stepper_Stop();
#endif
}
/* 掃描KEY3,增大目標(biāo)位置*/
if( Key_Scan(KEY3_GPIO_PORT,KEY3_PIN) == KEY_ON )
{
/* 目標(biāo)位置增加48000,對(duì)應(yīng)電機(jī)位置增加20圈 */
move_pid.target_val += 48000;
#if PID_ASSISTANT_EN
int temp = move_pid.target_val;
set_computer_value(SEED_TARGET_CMD, CURVES_CH1, &temp, 1);// 給通道 1 發(fā)送目標(biāo)值
#endif
}
/* 掃描KEY4,減小目標(biāo)位置 */
if( Key_Scan(KEY4_GPIO_PORT,KEY4_PIN) == KEY_ON )
{
/* 目標(biāo)位置減小48000,對(duì)應(yīng)電機(jī)位置減少20圈 */
move_pid.target_val -= 48000;
#if PID_ASSISTANT_EN
int temp = move_pid.target_val;
set_computer_value(SEED_TARGET_CMD, CURVES_CH1, &temp, 1);// 給通道 1 發(fā)送目標(biāo)值
#endif
}
}
}
補(bǔ)充知識(shí)點(diǎn)
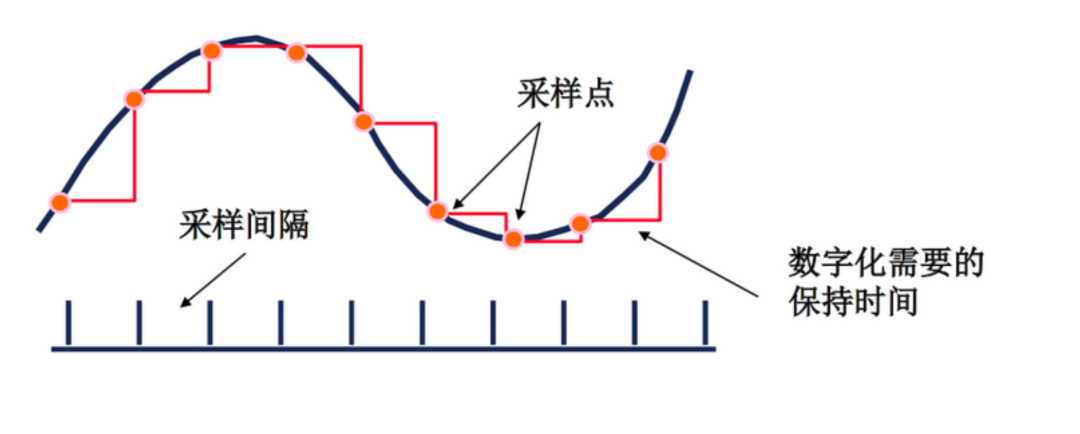
模擬量數(shù)字化
實(shí)際數(shù)字化應(yīng)用中,PID 系統(tǒng)中的積分項(xiàng)和微分項(xiàng)需要進(jìn)行離散化處理。
類似的典型應(yīng)用有數(shù)字示波器。對(duì)于數(shù)字示波器來說它無(wú)法直接量化模擬信號(hào),替代的辦法就是持續(xù)周期性采樣,然后將得到的一系列采樣點(diǎn)顯示出來,當(dāng)采樣速率越高,顯示的圖像越真實(shí),這就是數(shù)學(xué)中極限的與微分的思想。
香農(nóng)(Shannon) 采樣定律

?定理內(nèi)容
香農(nóng)取樣定理是針對(duì)有限帶寬函數(shù)的,為了不失真地恢復(fù)模擬信號(hào),采樣頻率應(yīng)該不小于模擬信號(hào)頻譜中最高頻率的2倍。
審核編輯:劉清
-
數(shù)字示波器
+關(guān)注
關(guān)注
7文章
551瀏覽量
34525 -
PID控制器
+關(guān)注
關(guān)注
2文章
173瀏覽量
19097 -
雙閉環(huán)控制
+關(guān)注
關(guān)注
1文章
10瀏覽量
10068 -
python
+關(guān)注
關(guān)注
56文章
4825瀏覽量
86271
原文標(biāo)題:一文搞定 PID算法推導(dǎo)+調(diào)試技巧+雙閉環(huán)控制+代碼仿真
文章出處:【微信號(hào):最后一個(gè)bug,微信公眾號(hào):最后一個(gè)bug】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
基于PID的電機(jī)閉環(huán)控制淺析
用labview實(shí)現(xiàn)伺服電機(jī)的閉環(huán)控制,用PID(泛布爾算法)控制,有大神會(huì)么????
采用了PID控制器的閉環(huán)控制策略
通過PID算法控制電機(jī)轉(zhuǎn)速和舵機(jī)角度實(shí)現(xiàn)閉環(huán)控制
位置閉環(huán)控制描述
SPWM變頻電源的雙閉環(huán)控制是什么意思
無(wú)刷直流力矩電動(dòng)機(jī)雙閉環(huán)控制策略仿真分析
PID白話式理解說明及智能車閉環(huán)控制詳解
智能車速度控制pid(電機(jī)閉環(huán)控制算法)
詳細(xì)分析PID控制算法原理和調(diào)試口訣
PID回路控制及閉環(huán)控制原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論