 RA6T2無傳感器矢量控制應用筆記 [4] 控制程序描述 (2)
RA6T2無傳感器矢量控制應用筆記 [4] 控制程序描述 (2)
3. 控制程序描述
介紹本應用筆記的目標軟件。
3.1.7 采用單電阻時的相電流測量方法
本節闡述了使用本軟件測量相電流的方法。
1、相電流的測量時間
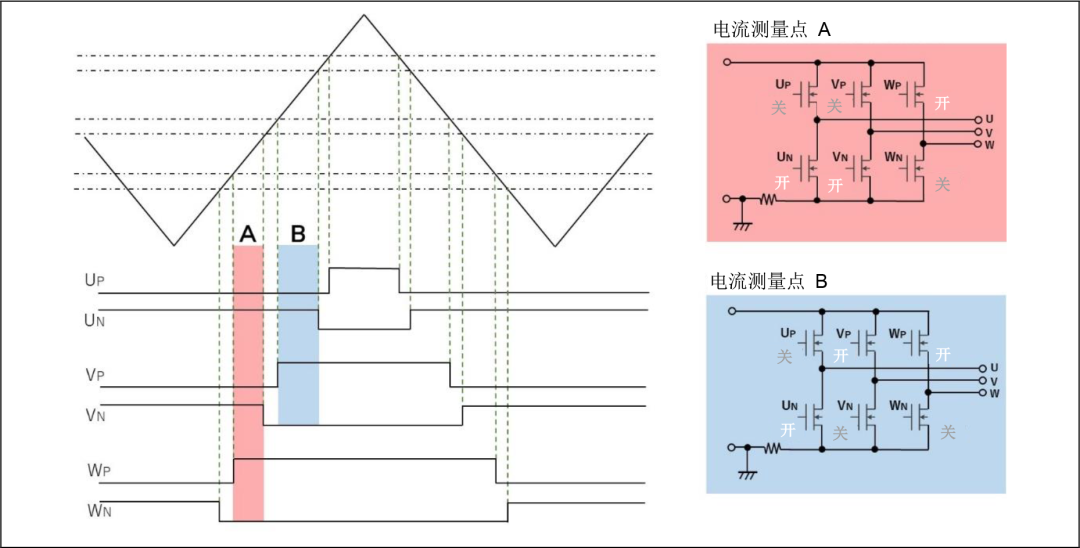
圖3-5 PWM的波形(占空比模式 W>V>U)
在本程序中,三角波PWM模式3通過GPT單元生成包含死區時間的PWM波。圖3-5顯示占空比模式為W>V>U時PWM的波形。
在圖中點A的位置,只有W相的上臂處于打開狀態,如右側紅色矩形所示。在此情況下,流經單電阻的電流與流經W相的電流相同。
在圖中點B的位置,只有U相的下臂處于打開狀態,如右側藍色矩形所示。在此情況下,流經單電阻的電流與流經U相的電流相同。
剩下的V相電流可以使用基爾霍夫第一定律通過上述相電流來計算。
因此,測量A和點B即可測量三相電流。
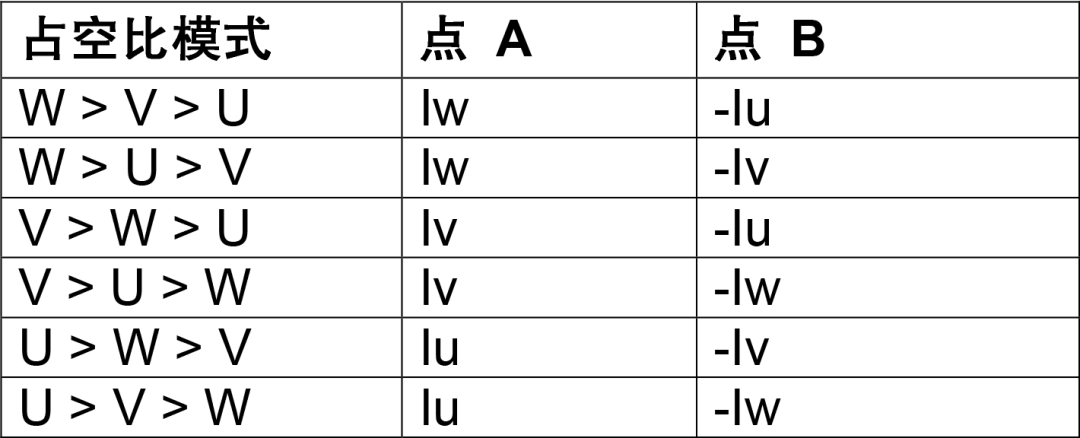
圖3-5所示情況為占空比模式W>V>U。每相PWM輸出將執行六種占空比模式。在點A和點B測量的電流根據占空比模式而變化,因此有必要為每相分配計算的電流。由于各個相位關系在每次計算PWM占空比時都可獲知,因此可以進行電流分配。
表3-6 占空比模式與相電流之間的關系
2、使用RA6T2功能的分流電阻電流測量方法
當按照①所述采用單電阻測量電流時,需要根據PWM占空比設置來控制A/D轉換器的轉換時間。在示例軟件中,這是由RA6T2 GPT模塊的GTADTRA和A/D轉換開始請求功能,通過GTADTRB寄存器與GTCNT計數器的比較匹配來實現的。
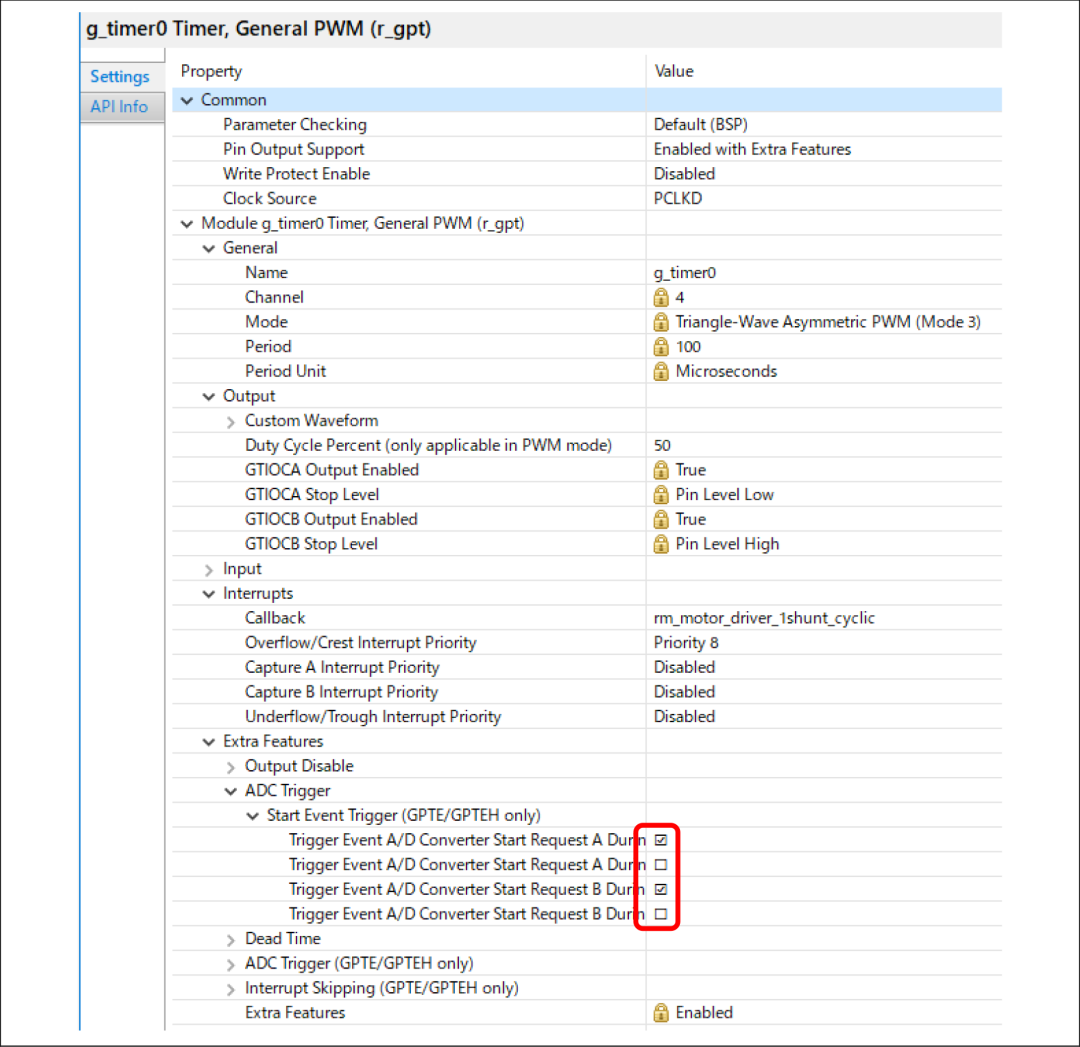
圖3-6 GPT ADC觸發器設置 (FSP 3.5.0)
3、占空比調整
如果確保①中所示的時序,則通過一個分流電阻即可檢測電流,但是不能根據運行期間的PWM占空比設置條件來確保足夠的轉換時間。因此,無法正確獲得電流值。以下兩種測量用于無法確保時間的情況。
● 當兩個相位的開關時序彼此接近時
當兩個相位的開關時序彼此接近并且無法確保A/D轉換時間時,PWM占空比不變,A/D轉換需要將相位開關時序延后。轉換時間只能通過偏移來保證。
●當無法實現時序偏移時
如果PWM開關時序如上所述延遲,則占空比加寬,如果達到PWM載波周期的終點,則時序無法延遲。此時,調制系數近似為1,因此應將調制系數限制為使PWM開關時序位于載波周期的終點。
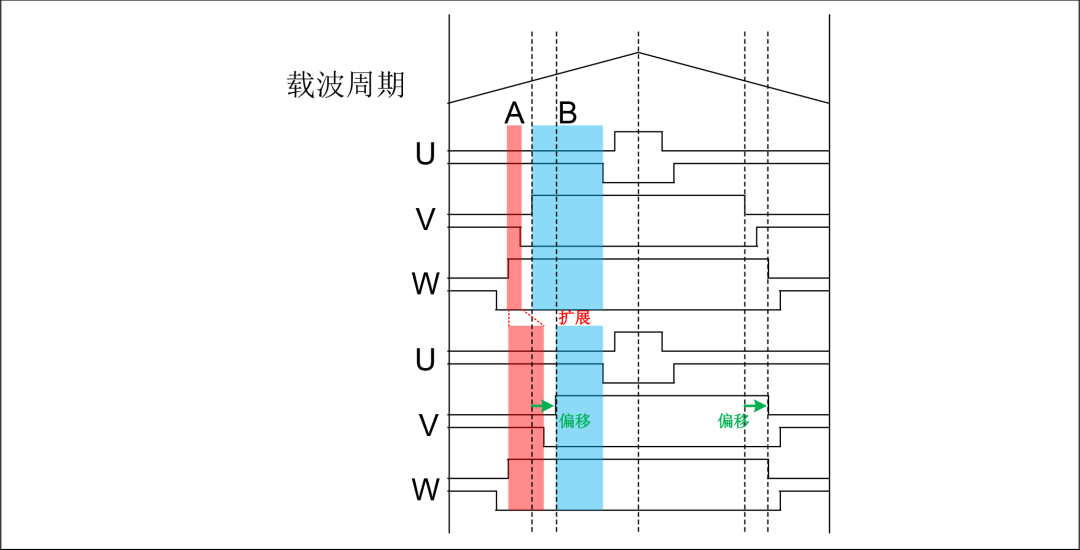
圖3-7 占空比調整
3.1.8 AD觸發器
顯示AD觸發器時序和掃描組。
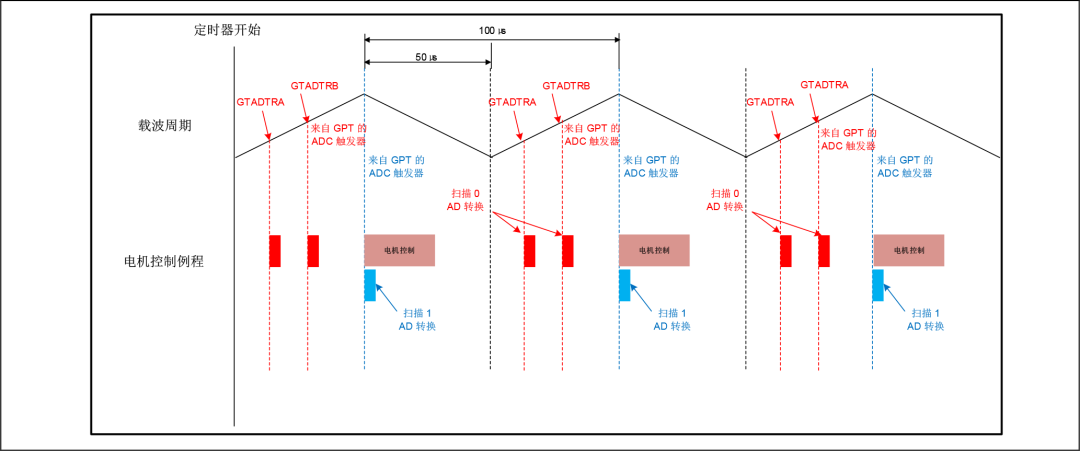
圖3-8 AD觸發器時序
3.2 無傳感器矢量控制軟件的函數規范
本應用筆記的目標軟件的控制過程主要由100[μs] 周期中斷(載波中斷)和500[μs] 周期中斷組成。如下面的圖3-9和圖3-10所示,用紅色虛線表示的控制過程以100[μs] 為周期執行,藍色虛線表示的控制過程以500[μs] 為周期執行。
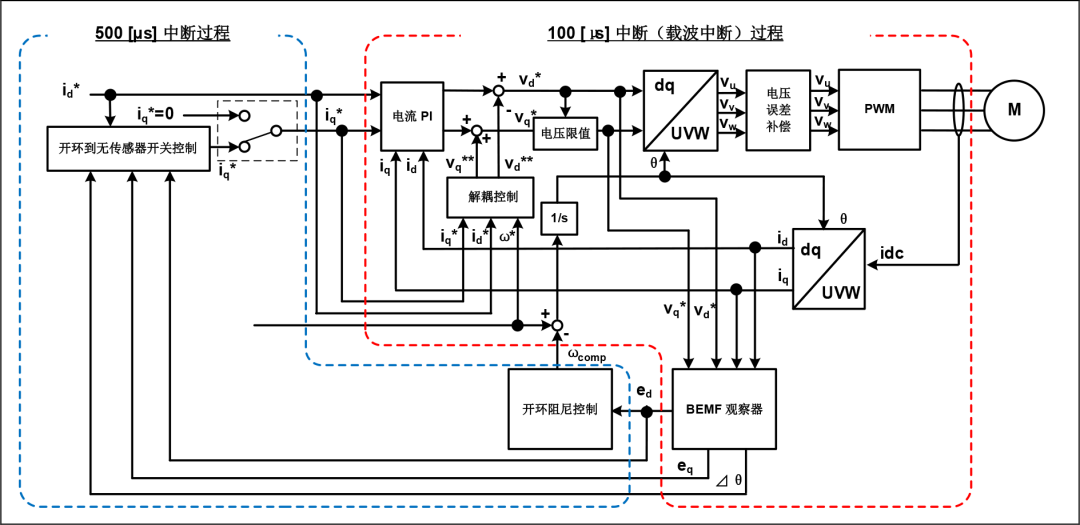
圖3-9 無傳感器矢量控制(開環控制)框圖
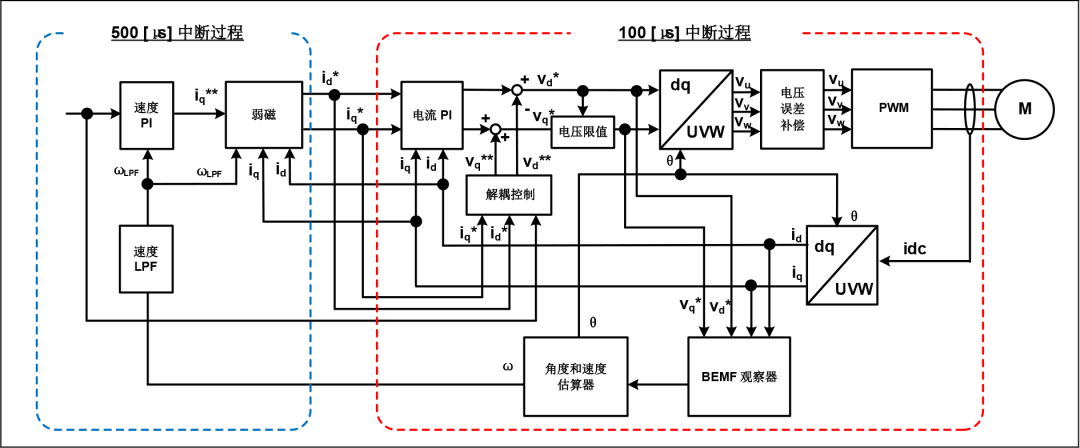
圖3-10 無傳感器矢量控制(無傳感器控制)框圖
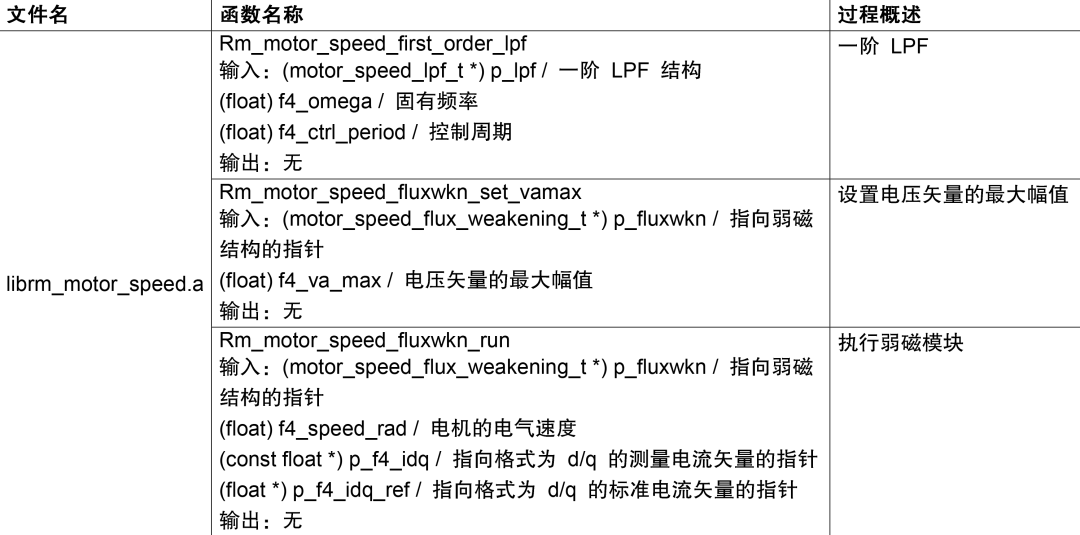
本節介紹2個中斷函數的規范以及在每個中斷周期內執行的函數。下表僅列出了無傳感器矢量控制的主要函數。有關表中未列出的函數規范,請參見源代碼。
表3-7 100[μs] 周期中斷內執行的函數的列表 (1/4)
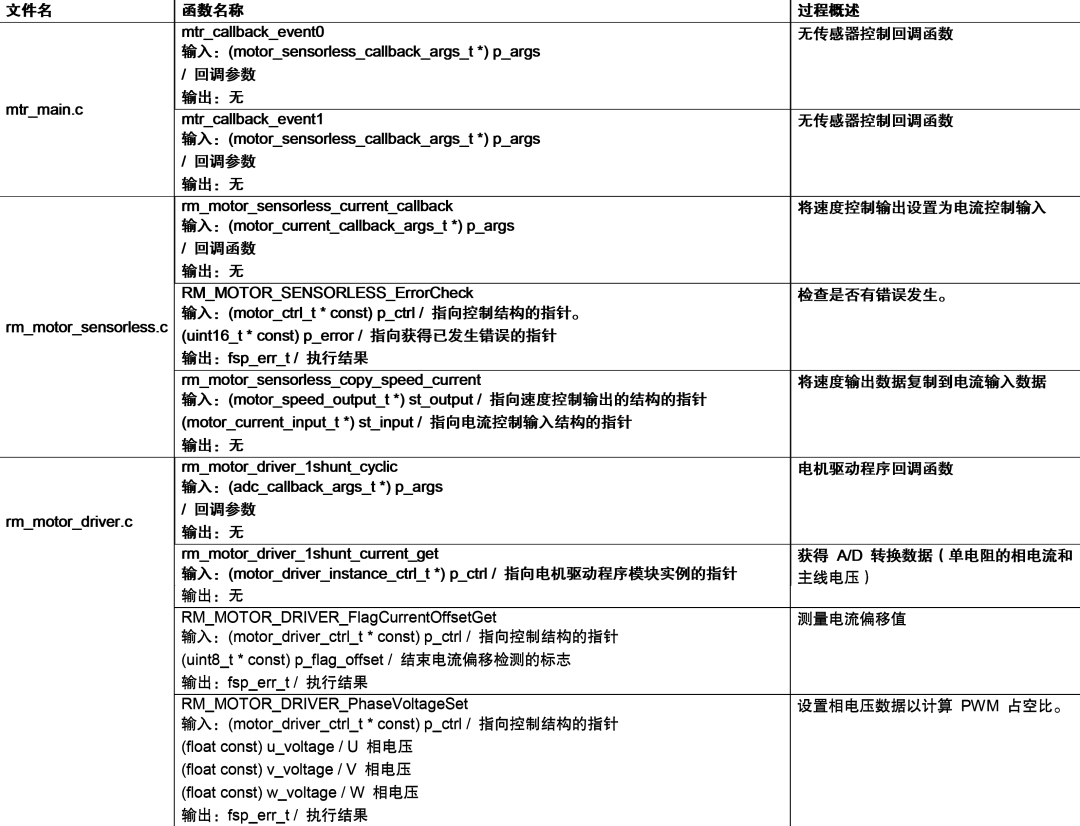
表3-8 100[μs] 周期中斷內執行的函數的列表 (2/4)
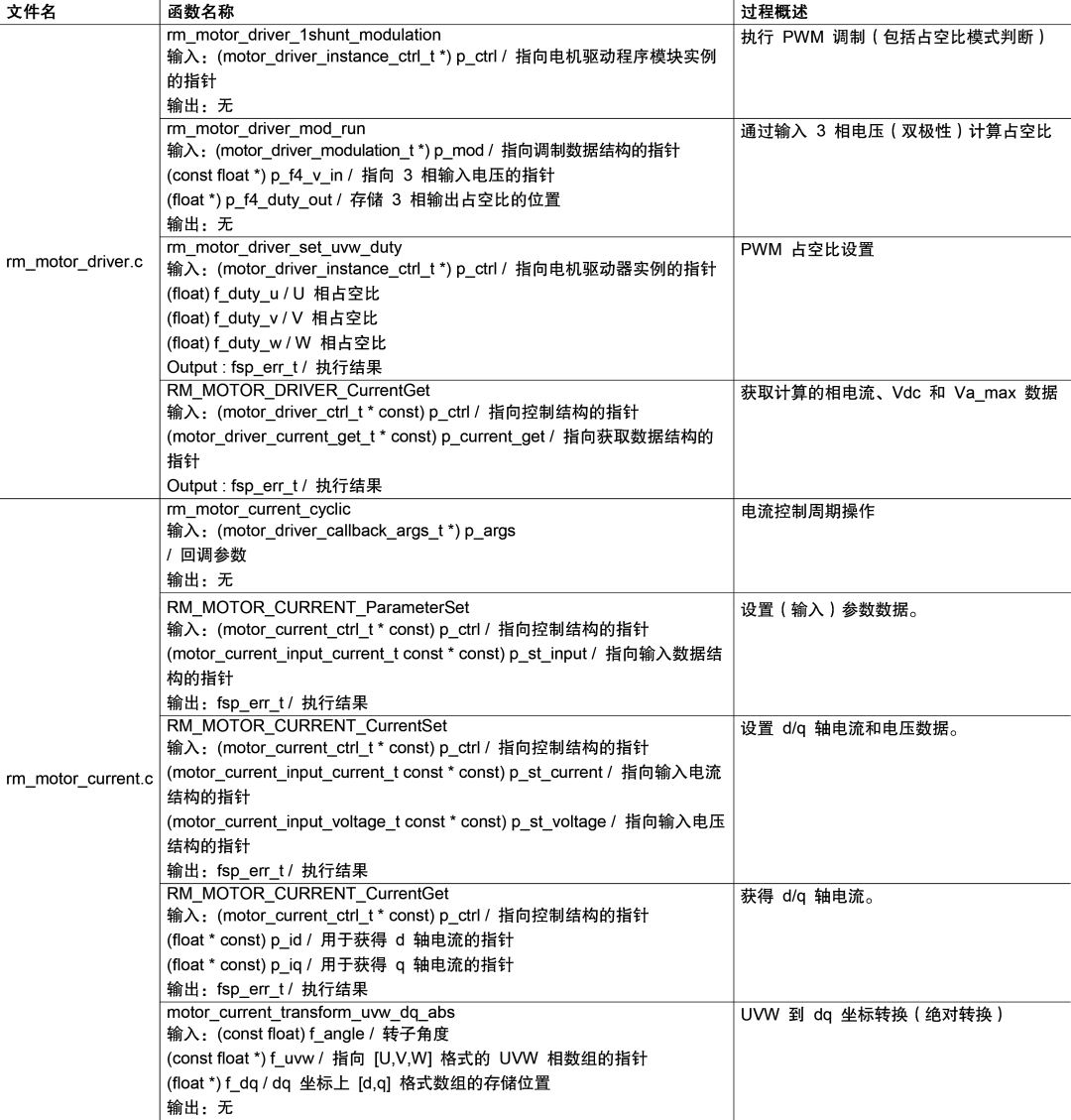
表3-9 100[μs] 周期中斷內執行的函數的列表 (3/4)
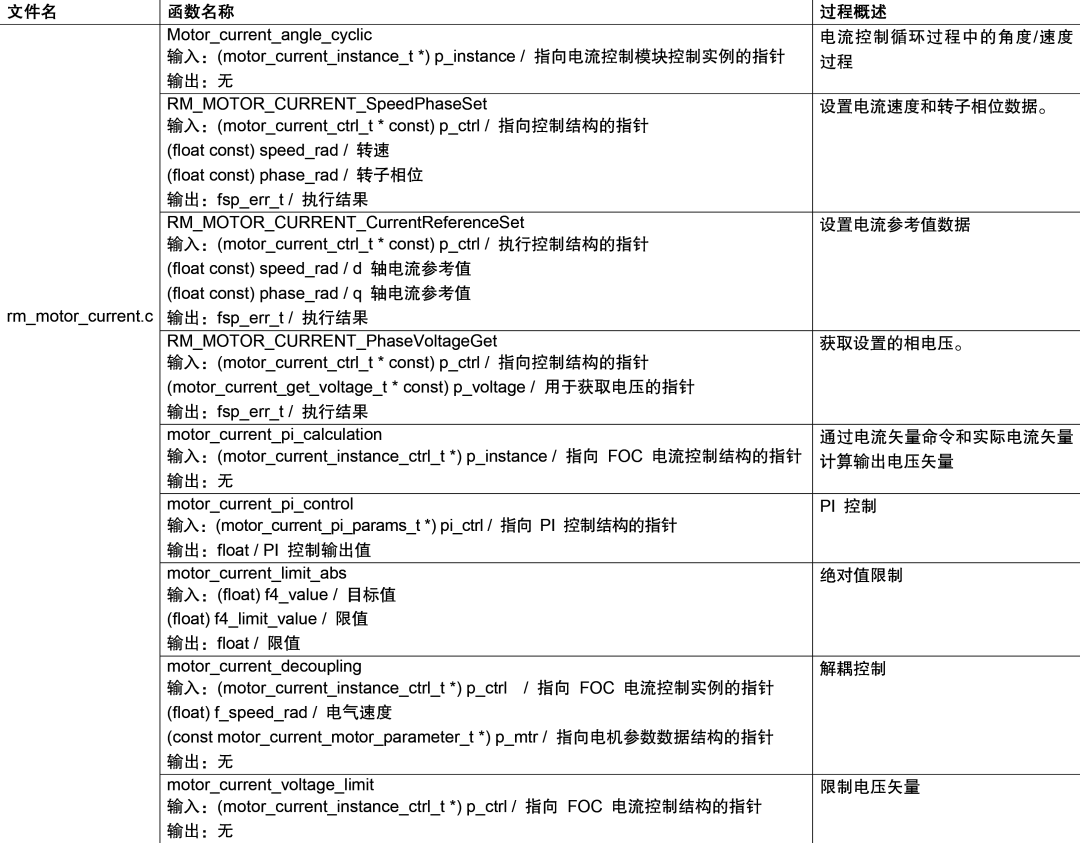
表3-10 100[μs] 周期中斷內執行的函數的列表 (4/4)

表3-11 500[μs] 中斷內執行的函數的列表 (1/2)
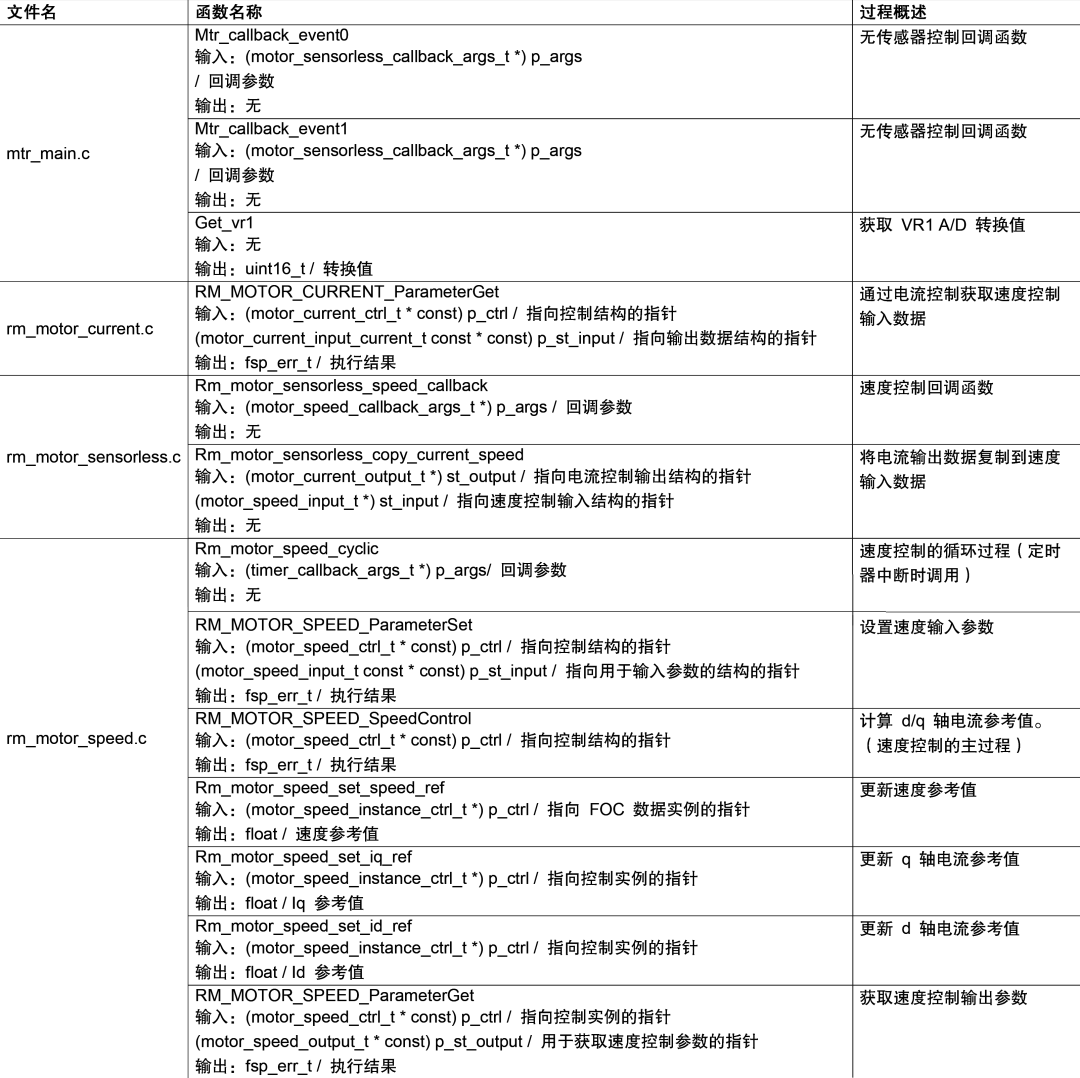
表3-12 500[μs] 中斷內執行的函數的列表 (2/2)
未完待續_
-
傳感器
+關注
關注
2564文章
52668瀏覽量
764268 -
測量
+關注
關注
10文章
5187瀏覽量
112986
發布評論請先 登錄
RX23T永磁同步電動機無傳感器矢量控制應用說明和控制程序資料
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [1] 概述](https://file1.elecfans.com/web2/M00/88/C6/wKgZomRx0tuADg6mAAAB2wBJKv0710.png)
RA6T2無傳感器矢量控制應用筆記 [3] 控制程序描述 (1)
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [3] <b class='flag-5'>控制程序</b><b class='flag-5'>描述</b> (1)](https://file1.elecfans.com/web2/M00/88/C5/wKgaomRx0UeAffmrAAAB55e0-GI087.png)
RA6T2無傳感器矢量控制應用筆記 [4] 控制程序描述 (2)
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [<b class='flag-5'>4</b>] <b class='flag-5'>控制程序</b><b class='flag-5'>描述</b> (<b class='flag-5'>2</b>)](https://file1.elecfans.com/web2/M00/88/C5/wKgaomRx0TSAM_iRAAAnsrHpeYA036.png)
RA6T2無傳感器矢量控制應用筆記 [5] 控制程序描述 (3)
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [5] <b class='flag-5'>控制程序</b><b class='flag-5'>描述</b> (3)](https://file1.elecfans.com/web2/M00/88/C5/wKgaomRx0NuAJIP8AAADbu4X9Ec851.gif)
RA6T2的16位模數轉換器操作 [4] 配置RA6T2 ADC模塊 (1)
![<b class='flag-5'>RA6T2</b>的16位模數轉換<b class='flag-5'>器</b>操作 [<b class='flag-5'>4</b>] 配置<b class='flag-5'>RA6T2</b> ADC模塊 (1)](https://file1.elecfans.com/web2/M00/BB/1B/wKgZomWXtb6ACk_NAAARMuEl9ZA261.png)
RA6T2的16位模數轉換器操作 [5] 配置RA6T2 ADC模塊 (2)
RA6T2的16位模數轉換器操作 [7] 配置RA6T2 ADC模塊 (4)





 工商網監
工商網監
評論