 詳解快速控制原型RCP與硬件在環仿真HIL
詳解快速控制原型RCP與硬件在環仿真HIL
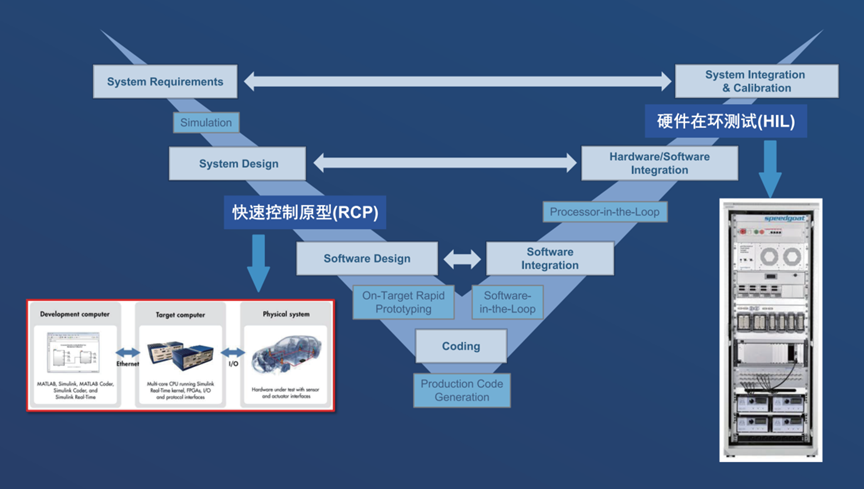
控制器軟件開發的V流程中,有兩個需要通過實時仿真完成的重要環節,即快速控制原型(RCP)與硬件在環仿真(HIL)。
我相信有很多朋友都對這兩個概念早有耳聞,但是它們真正的作用是什么呢?在現實中,我們又該如何區分RCP和HIL呢?
接下來的時間里,本文就將參考Speedgoat實時仿真方案,徹底解開您的疑惑!
知識點1:什么是快速控制原型?
快速控制原型(Rapid Control Prototyping,簡稱RCP),話不多說,咱們先看公式:
RCP=假的控制器+真的被控對象
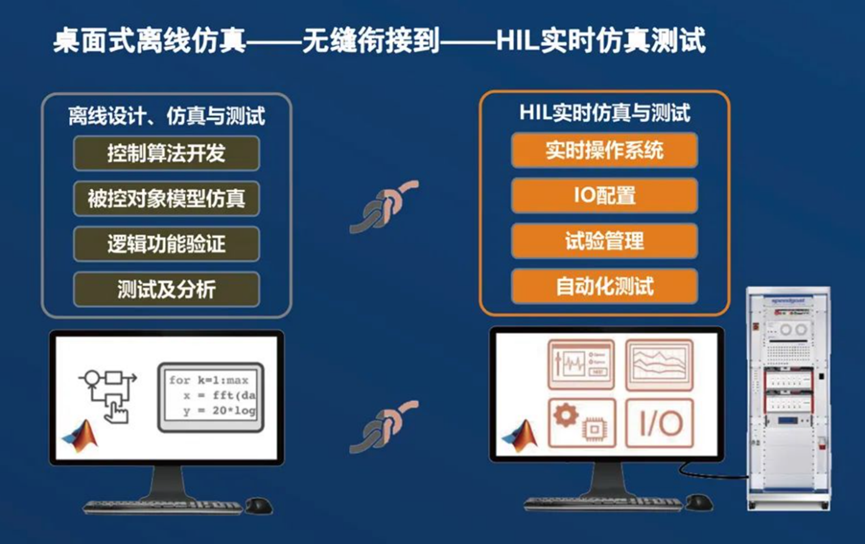
在控制器開發中,如果我們使用實時仿真機運行Simulink算法,控制實際的物理對象(如開關,電機,閥門等)。此時,我們的Speedgoat實時仿真機,就已經成了一個便捷的原型控制器。

憑借這個原型控制器,軟件工程師可以在很短的時間內,完成算法的功能驗證,故得名為快速控制原型。
在傳統的控制器開發流程中,算法的進一步驗證,需要工程師自己去開發一套硬件,并且自行編寫調用硬件資源的代碼,然后把控制算法部署到硬件里。而且,在后續測試中,一旦發現問題,就可能要把上面的步驟重來一遍!
這種方法,別說開發者了,我猜屏幕前的朋友們看著都覺得繁瑣。更何況,這些冗長的步驟,還給我們的潛在用戶,帶來了更加冗長的賬單。
對于這些用戶,他們有一個強烈的需求,就是:有人能給他們提供一個成熟的、無bug的硬件,同時給他們提供這個硬件的底層(一般是Simulink驅動模塊),讓他們能夠直接將應用層算法下載到這個硬件中,使得他們可以直接用這個硬件去控制被控對象,在實時的環境中驗證應用層算法。
So,快速控制原型(RCP)應運而生!
它最大的意義就在于,幫助用戶快速地構建一個原型控制器,這個原型控制器可以跟真實被控對象相連,在實時環境下驗證用戶的應用層算法。
知識點2:什么是硬件在環仿真?
硬件在環仿真(Hardware-in-loop,簡稱HIL),同樣的,咱們先看公式:
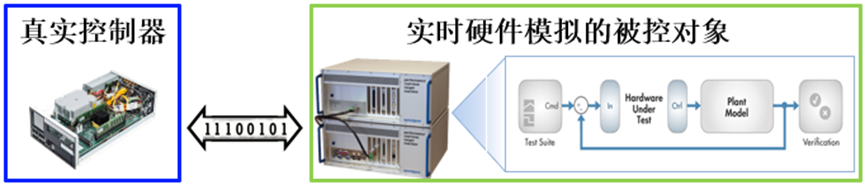
HIL=真的控制器+假的被控對象
沒錯,RCP和HIL這兩個聽上去感覺很像的概念,其實是完全相反的!硬件在環仿真(HIL)時,運行在實時機中的Simulink被控對象模型(模擬被控對象),受真實控制器的控制,以此對控制器進行測試。
硬件在環仿真(HIL)可以適用于幾乎所有嵌入式控制器的功能測試和驗證,尤其是在汽車領域應用頗多。
實車測試之前,預先通過HIL對控制器做一個全面的功能測試,提前暴露和解決控制器的bug,大幅度減少實車測試的時間、人力和資金成本。
硬件在環仿真(HIL)的核心就在于實時仿真機。一般而言,被控對象模型比控制算法模型復雜,所以要求運行HIL的實時仿真機,算力更強,CPU配置更高。
要易于將Simulink模型編譯、下載到實時仿真機中,具備靈活且豐富的IO和通訊接口,能夠滿足不同應用的需求(一般還需要搭配額外的拓展板卡)。
| 配置 | 規格 |
| CPU | IntelXeon 6核4.0GHzCPU |
| 實時操作系統 | Simulink Real-Time |
| MATLAB版本支持 | R2021a及以后版本 |
| 內存 | 8GB RAM |
| 存儲空間 | 120GB SSD |
| 視頻接口 | 1 xHDMI和1 x DisplayPort |
| 上位機接口Ethernet | 1路千兆以太網端口,用于與上位機的通訊 |
| 千兆網口 | 1路千兆以太網端口,支持EtherCAT Master,real-time UDP,TCP/IP以及XCP Master協議 |
| 串行接口 | 2路RS232端口,最高支持波特率115kbps |
| 機箱外殼 | 4U 19寸鋁合金外殼 |
| 供電 | AC 100-240V, 50/60 Hz |
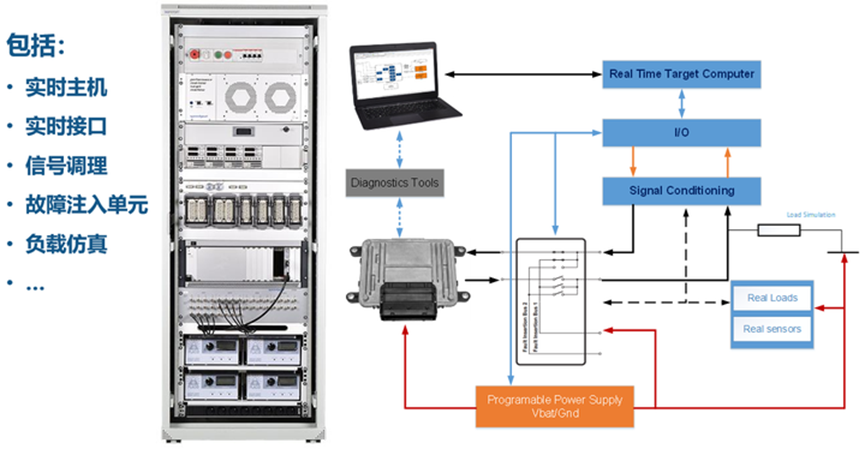
一種典型配置
在實際的使用中,仿真主機一般要搭配其他的設備,形成一套完整的HIL測試設備,根據設備的形態,又可分為兩類:桌面式和機柜式。
① 機柜式
一般汽車領域用的多。汽車領域的硬件在環仿真設備,已經有了一定的標準,涉及到很多部件,桌面式的設備已經難以容納這些設備,所以會做成機柜的形式,把這些設備都集成在一個大機柜中。
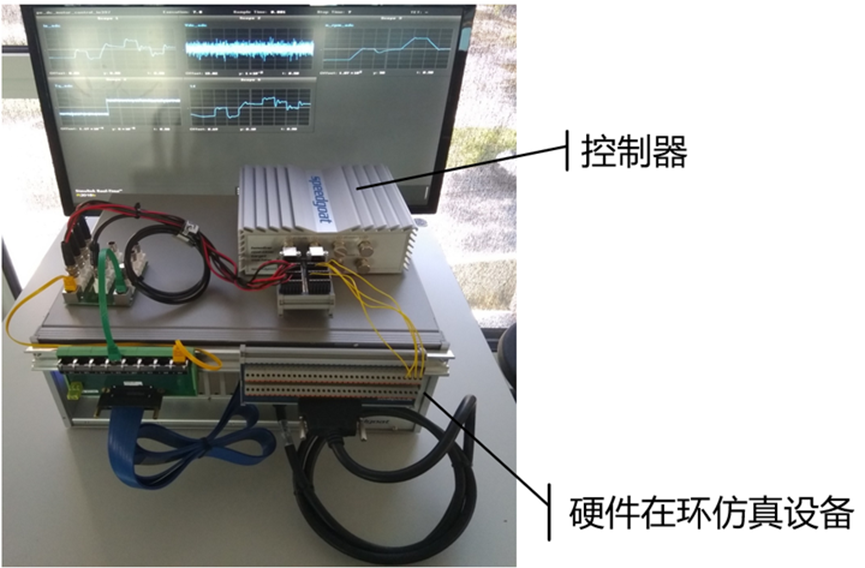
②桌面式
一般而言,其他領域的硬件在環仿真設備相對沒那么復雜,可以直接擺放在桌面。
學習完畢,現在是禮物時間!
首先自我介紹一下,我們上海熠速信息技術有限公司(簡稱“熠速”),2017年3月成立于中國上海,是一家持續和快速成長的高新技術企業。
作為Speedgoat在中國的獨家代理,我們圍繞嵌入式系統開發和測試,為用戶提供硬件在環仿真系統(HIL)、快速控制原型(RCP)、電機控制算法開發等覆蓋各類控制器的解決方案。
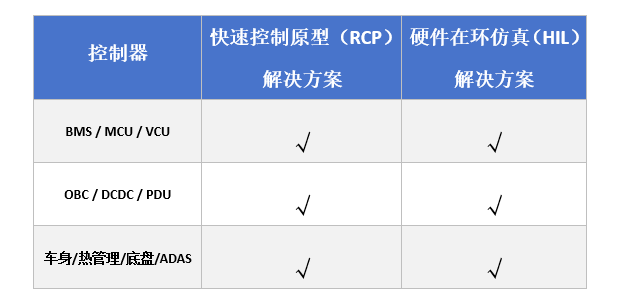
汽車領域實時仿真解決方案矩陣圖
目前熠速在北京、成都、廣州、深圳都設有分公司,服務當地片區客戶。熠速堅持“以客戶為中心、為客戶創造價值”的宗旨,第一時間為客戶您提供優質且專業的服務!
審核編輯:劉清
-
控制器
+關注
關注
114文章
16998瀏覽量
183169 -
SSD
+關注
關注
21文章
2953瀏覽量
119186 -
RCP
+關注
關注
0文章
26瀏覽量
9214 -
simulink仿真
+關注
關注
0文章
75瀏覽量
8737
原文標題:詳解快速控制原型RCP與硬件在環仿真HIL|文末有彩蛋
文章出處:【微信號:eng2mot,微信公眾號:汽車ECU開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄







 工商網監
工商網監
評論