") 15倍加速!SuperCluster:最強(qiáng)3D點(diǎn)云全景分割!
15倍加速!SuperCluster:最強(qiáng)3D點(diǎn)云全景分割!

1. 寫(xiě)在前面
今天筆者為大家推薦一篇最新的開(kāi)源工作SuperCluster,實(shí)現(xiàn)了大型三維點(diǎn)云的全景分割,可以在一次推理中處理包含數(shù)百萬(wàn)個(gè)點(diǎn)和數(shù)千個(gè)對(duì)象的場(chǎng)景。在僅有209k個(gè)參數(shù)的情況下,SuperCluster比SOTA方法小30多倍,訓(xùn)練速度快15倍。
下面一起來(lái)閱讀一下這項(xiàng)工作
2. 摘要
通過(guò)將該任務(wù)重新定義為可擴(kuò)展的圖聚類問(wèn)題,我們介紹了一種高效的方法用于大型三維點(diǎn)云的全景分割。該方法可以僅使用局部輔助任務(wù)進(jìn)行訓(xùn)練,從而省去了訓(xùn)練過(guò)程中資源密集型的實(shí)例匹配步驟。此外,我們的公式可以很容易地適應(yīng)超點(diǎn)范式,從而進(jìn)一步提高其效率。這使得我們的模型可以在一次推理中處理包含數(shù)百萬(wàn)個(gè)點(diǎn)和數(shù)千個(gè)對(duì)象的場(chǎng)景。我們的方法,稱為SuperCluster,在兩個(gè)室內(nèi)掃描數(shù)據(jù)集上取得了最新的全景分割性能:S3DIS Area 5為50.1 PQ ( + 7.8 ),ScanNetV2為58.7 PQ ( + 25.2 )。我們還為兩個(gè)大規(guī)模移動(dòng)建圖基準(zhǔn):KITTI - 360和DALES設(shè)置了第一個(gè)最先進(jìn)的基準(zhǔn)。在僅有209k個(gè)參數(shù)的情況下,我們的模型比最好的競(jìng)爭(zhēng)方法小30多倍,訓(xùn)練速度快15倍。
3. 效果展示
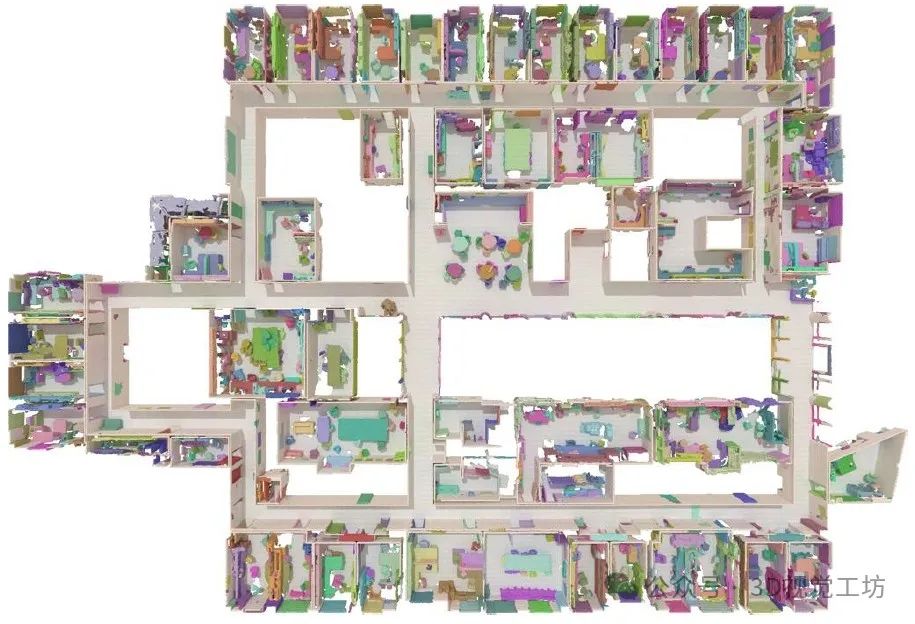
S3DIS Area 5的大規(guī)模全景分割結(jié)果,共有9.2 M個(gè)點(diǎn)( 78M預(yù)采樣)和1863個(gè)真實(shí)"物"對(duì)象。SuperCluster可以在3.3秒內(nèi)在單塊V100 - 32GB GPU上一次推理處理如此大的掃描,并達(dá)到50.1的PQ值。
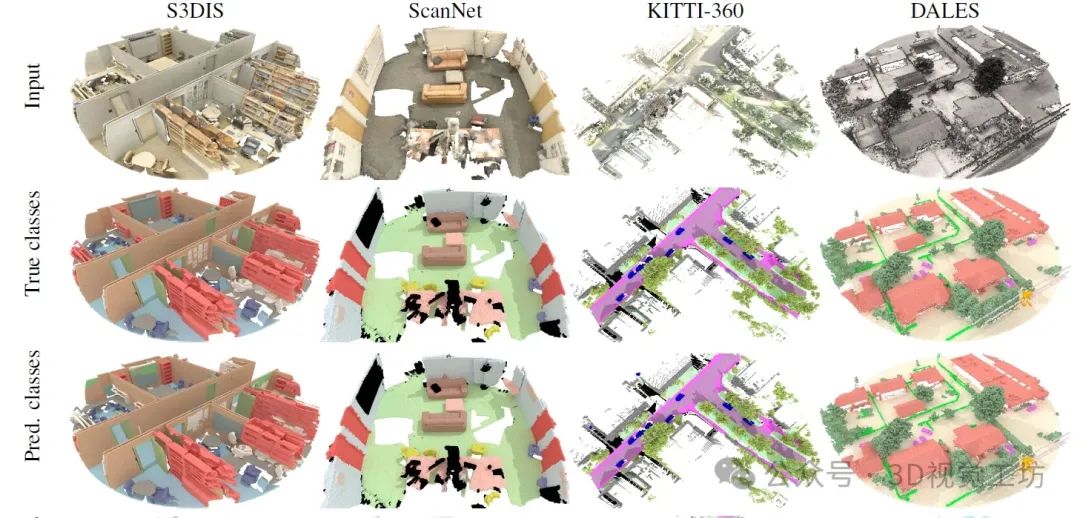
四個(gè)數(shù)據(jù)集的全景預(yù)測(cè)結(jié)果。
4. 具體原理是什么?
SuperCluster對(duì)一個(gè)包含兩個(gè)物體(椅子和沙發(fā))的簡(jiǎn)化場(chǎng)景的操作順序:子圖( a )展示了第一階段,其中點(diǎn)云被分割成具有簡(jiǎn)單幾何形狀的連通超點(diǎn)。在子圖( b )中,預(yù)測(cè)每個(gè)超點(diǎn)的語(yǔ)義類分布。在子圖( c )中,預(yù)測(cè)每一對(duì)相鄰超點(diǎn)的對(duì)象一致性,表明它們屬于同一個(gè)對(duì)象的可能性。子圖( d )展示了一個(gè)圖聚類問(wèn)題的輸出,該問(wèn)題在對(duì)象之間的轉(zhuǎn)換處切割邊的同時(shí),合并了具有兼容類分布和對(duì)象一致性的超點(diǎn)。由此產(chǎn)生的超點(diǎn)簇定義了全景3D分割的實(shí)例。

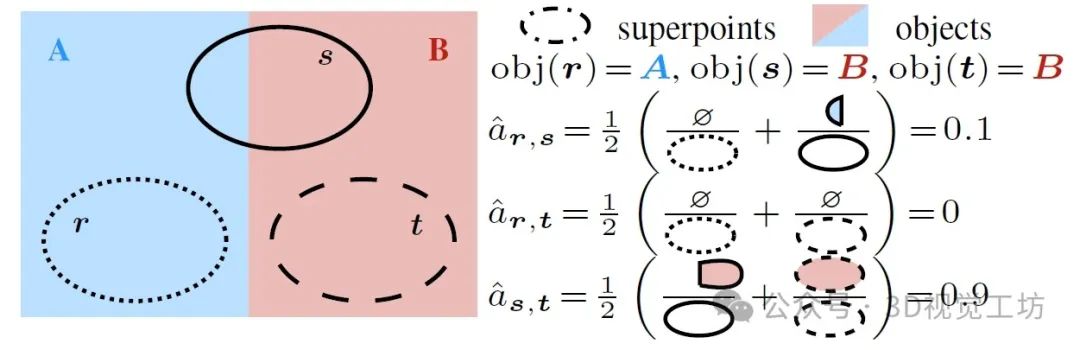
超點(diǎn)對(duì)象Agreement:對(duì)每一對(duì)相鄰的超點(diǎn)( s , t)計(jì)算一個(gè)對(duì)象一致性分?jǐn)?shù)。這個(gè)值是由s和t以及它們的多數(shù)對(duì)象obj ( t )和obj ( s )之間的平均重疊率定義。
5. 和其他SOTA方法的對(duì)比
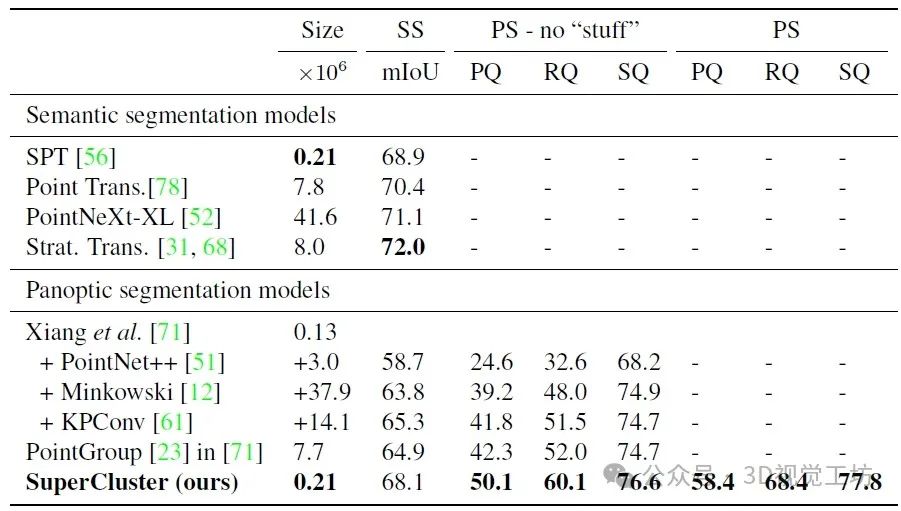
S3DIS Area 5上SOTA語(yǔ)義分割方法的語(yǔ)義( SS )和全景分割結(jié)果,提供了兩個(gè)全景度量,將所有類別視為"事物" ( PS -- no "stuff"),將墻壁、天花板和地板視為"物品" ( PS )。
6. 總結(jié)
這篇文章引入了SuperCluster,一種用于大規(guī)模點(diǎn)云的三維全景分割的新方法。作者將這個(gè)任務(wù)設(shè)計(jì)為可擴(kuò)展的圖聚類問(wèn)題,繞過(guò)了當(dāng)前全景分割方法中的一些計(jì)算密集型步驟。SuperCluster在S3DIS,ScanNet,KITTI - 360和DALES在內(nèi)的多個(gè)基準(zhǔn)測(cè)試集上達(dá)到了最先進(jìn)的性能,同時(shí)顯著地更小,可擴(kuò)展,更容易訓(xùn)練。
審核編輯:黃飛
-
gpu
+關(guān)注
關(guān)注
28文章
4944瀏覽量
131224 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1224瀏覽量
25446
原文標(biāo)題:15倍加速!SuperCluster:最強(qiáng)3D點(diǎn)云全景分割!
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
基于3D點(diǎn)云的多任務(wù)模型在板端實(shí)現(xiàn)高效部署

基于深度學(xué)習(xí)的方法在處理3D點(diǎn)云進(jìn)行缺陷分類應(yīng)用

如何同時(shí)獲取2d圖像序列和相應(yīng)的3d點(diǎn)云?
3D點(diǎn)云技術(shù)介紹及其與VR體驗(yàn)的關(guān)系
點(diǎn)云問(wèn)題的介紹及3D點(diǎn)云技術(shù)在VR中的應(yīng)用
實(shí)現(xiàn)快讀高效且穩(wěn)健的3D稀疏點(diǎn)云的分割
3D的感知技術(shù)及實(shí)踐
3D全景線上博物館展廳的優(yōu)勢(shì)是什么
何為3D點(diǎn)云語(yǔ)義分割
首個(gè)無(wú)監(jiān)督3D點(diǎn)云物體實(shí)例分割算法
點(diǎn)云分割相較圖像分割的優(yōu)勢(shì)是啥?
3D點(diǎn)云數(shù)據(jù)集在3D數(shù)字化技術(shù)中的應(yīng)用
自動(dòng)駕駛3D點(diǎn)云語(yǔ)義分割數(shù)據(jù)標(biāo)注

基于點(diǎn)云的3D障礙物檢測(cè)介紹

基于深度學(xué)習(xí)的3D點(diǎn)云實(shí)例分割方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論