 什么是pid控制,其控制作用是什么
什么是pid控制,其控制作用是什么
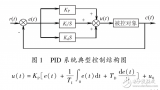
PID控制(Proportional-Integral-Derivative control)是一種常見的自動控制算法,它被廣泛應用于工業自動化、機器人控制、飛行器導航等領域。PID控制通過對反饋信號進行比例、積分和微分運算,從而實現系統的穩定控制和性能優化。
PID控制器由三個部分組成:比例控制器(P),積分控制器(I)和微分控制器(D)。每個部分都有不同的作用,綜合起來實現對系統的精確控制。
比例控制器(P)根據控制誤差的大小,以比例放大的方式對反饋信號進行修正。比例常數(Kp)決定了修正的幅度,當誤差增大時,修正幅度也會增大,從而加大了系統的穩定性。比例控制器對于快速響應和抑制系統震蕩有很好的效果。
積分控制器(I)根據控制誤差的積分,以增量放大的方式對反饋信號進行修正。積分項可以消除穩態誤差,并使系統的響應更為平滑。積分常數(Ki)決定了修正的速度,當誤差持續存在時,修正速度也會加快,從而保持系統精確控制。
微分控制器(D)根據控制誤差的變化率,以微分放大的方式對反饋信號進行修正。微分項可以預測誤差的變化趨勢,從而提前采取控制措施,抑制系統的超調和振蕩。微分常數(Kd)決定了修正的靈敏度,當誤差變化率增大時,修正靈敏度也會增加,從而保持系統的穩定性。
PID控制通過綜合比例、積分和微分控制器的輸出,可以實現對系統的自動調節。其中,比例控制器可以提供快速的響應,積分控制器可以消除穩態誤差,微分控制器可以提前預測誤差變化。PID控制器可以根據反饋信號和設定值之間的差異,動態調整控制器的輸出,從而保持系統的穩定運行。
PID控制器的設計和參數調節是一個常見的控制工程問題。傳統的方法是通過試錯法和經驗進行參數調整,但這種方法往往需要反復試驗和調整,效率較低。近年來,一些優化算法和自適應控制方法被應用于PID控制器設計中,可以更快、更準確地調節控制參數,提高控制系統的性能。
總之,PID控制是一種常見的控制算法,通過比例、積分和微分控制器的綜合作用,實現對系統的穩定控制和性能優化。它在工業自動化、機器人控制、飛行器導航等領域都有著廣泛的應用,是控制工程領域的重要工具之一。
-
自動控制
+關注
關注
10文章
721瀏覽量
44978 -
PID控制
+關注
關注
10文章
461瀏覽量
41065 -
工業自動化
+關注
關注
17文章
2678瀏覽量
68138 -
反饋信號
+關注
關注
0文章
32瀏覽量
8314
發布評論請先 登錄
數字PID控制及作用
什么是PID控制算法?PID控制算法C語言是如何實現的?
PID控制中P、I、D參數的作用是什么?
數字化PID控制算法的設計與機器人PID控制的實現






 工商網監
工商網監
評論