") 如何去提升機(jī)械臂的位置控制性能?
如何去提升機(jī)械臂的位置控制性能?
1.背景介紹
機(jī)械臂的位置控制是機(jī)械臂最重要的功能。機(jī)械臂的位置控制精度也是研究者及工程師一直關(guān)注的問題。本文梳理下機(jī)械臂位置控制的一些發(fā)展脈絡(luò),幫助大家提高對(duì)其的認(rèn)識(shí)以及如何去提升機(jī)械臂的位置控制性能。
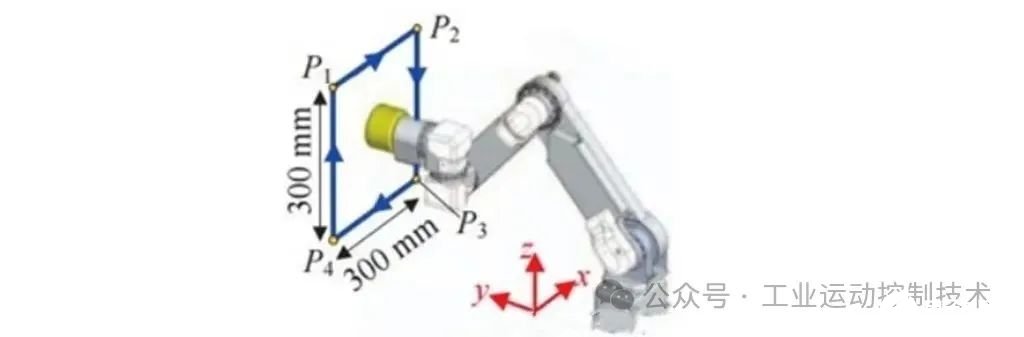
精度衡量:直接測(cè)量機(jī)械臂末端的位置比較困難,這里采用一種近似的方式,比較機(jī)械臂各軸指令角度與實(shí)際編碼器反饋角度間的偏差值。
2.控制策略
三環(huán)反饋伺服控制 這種位置控制方式是大家最為熟悉的。 此時(shí)控制都是在驅(qū)動(dòng)器里完成的,它根據(jù)指令位置去生成力矩,讓機(jī)械臂很好地追上指令位置,而控制器只是一個(gè)軌跡規(guī)劃器,負(fù)責(zé)發(fā)送給驅(qū)動(dòng)器指令位置。
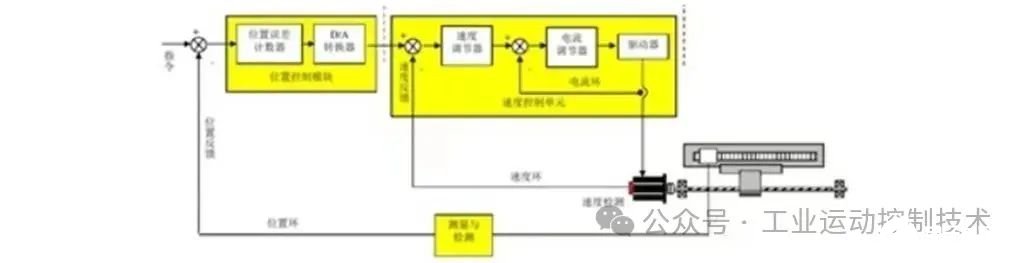
這種方式在穩(wěn)態(tài)時(shí)的精度很高,且抗干擾能力強(qiáng),這可以保證機(jī)器人的重復(fù)定位精度。 然而動(dòng)態(tài)性能較差,比如指令位置曲線與實(shí)際位置曲線間的時(shí)間延遲較大。
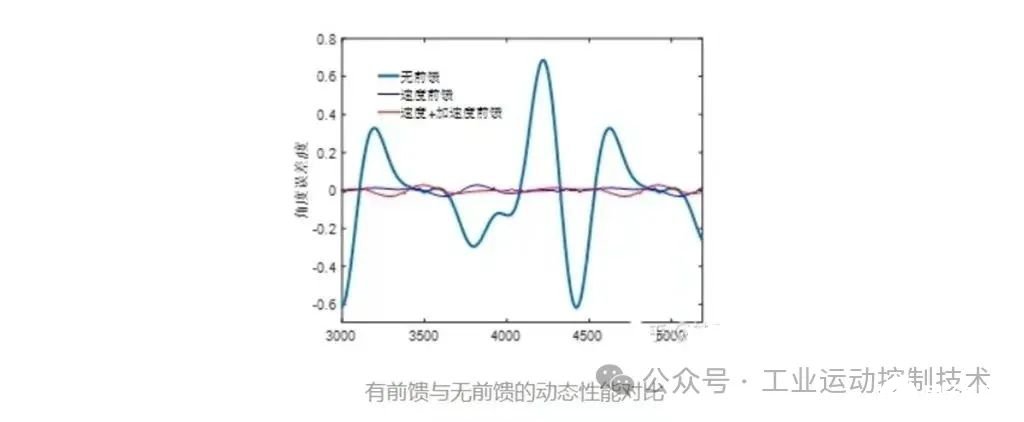
前饋+三環(huán)控制 這種策略是在三環(huán)反饋控制的基礎(chǔ)上,加入前饋指令值。 驅(qū)動(dòng)器一般需工作在CSP模式,前饋值的生成方式有兩種:控制器還是只發(fā)送給機(jī)械臂指令位置,驅(qū)動(dòng)器通過差分生成前饋速度值及前饋加速度值; 控制器不止發(fā)送指令位置,它還將前饋速度偏置值、前饋力矩偏置值也發(fā)送給驅(qū)動(dòng)器。
這種方式可以提供機(jī)械臂的動(dòng)態(tài)響應(yīng)能力,下圖是無前饋及有前饋下的位置誤差曲線。
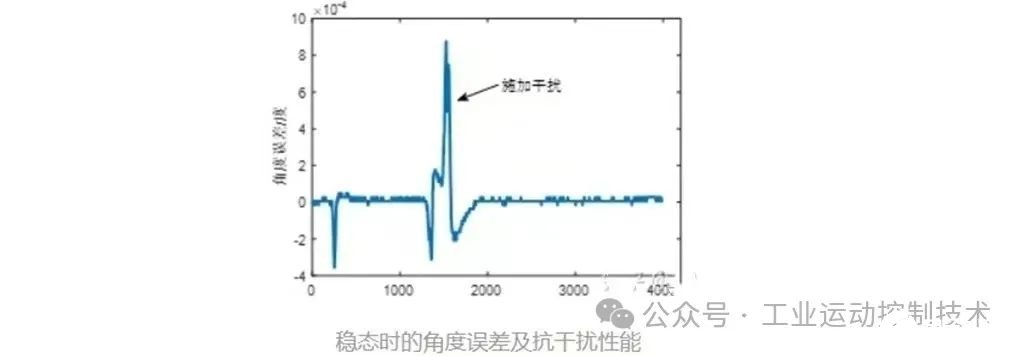
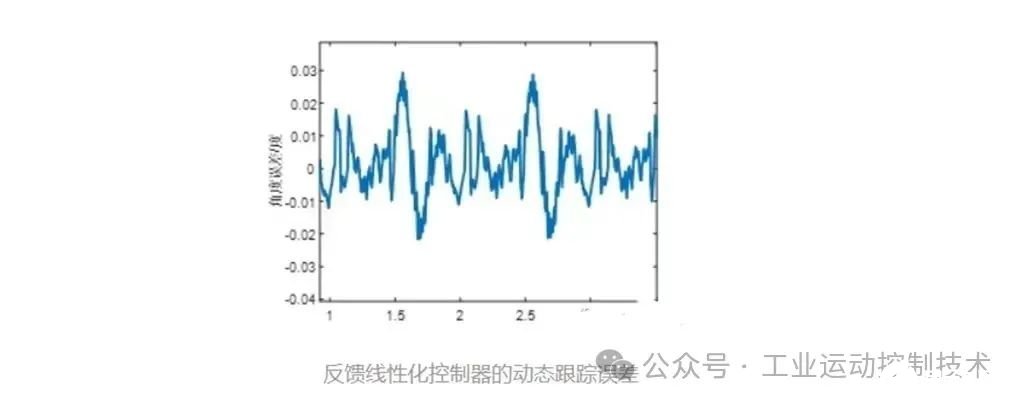
非線性控制 前兩種方式的驅(qū)動(dòng)器都是工作在位置控制下,而第三種策略將驅(qū)動(dòng)器置于電流/力矩模式下,采用現(xiàn)代控制理論中的一些非線性控制策略。 控制器直接根據(jù)指令位置計(jì)算出力矩值,發(fā)送給驅(qū)動(dòng)器。此時(shí)驅(qū)動(dòng)器弱化為一個(gè)功率放大模塊,而控制器才能算是在做運(yùn)動(dòng)控制。 這其中可采用的控制策略有計(jì)算力矩法、反饋線性化及一些自適應(yīng)控制策略等。 下圖的采用反饋線性化方法的控制效果,可以達(dá)到跟上一種方法差不多的動(dòng)態(tài)效果,但實(shí)驗(yàn)中發(fā)現(xiàn),它的穩(wěn)態(tài)精度及抗干擾能力不如上一種。
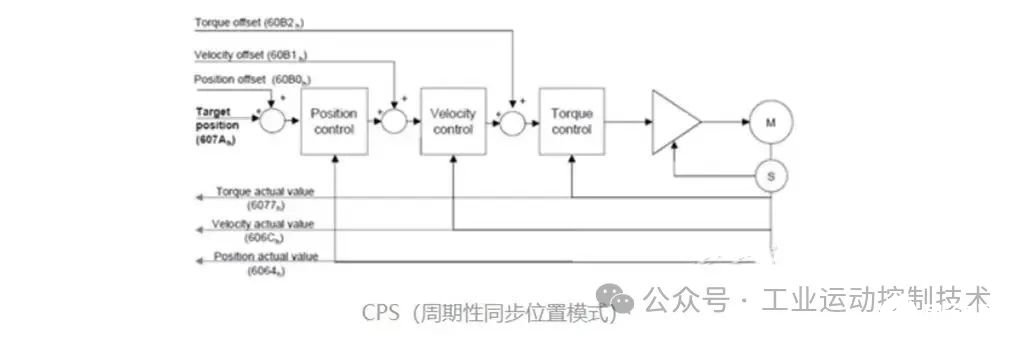
下圖是關(guān)于ABB控制器原理的一些資料,從中可以看到他們可能已經(jīng)采用了現(xiàn)代控制理論及非線性控制的部分東西。
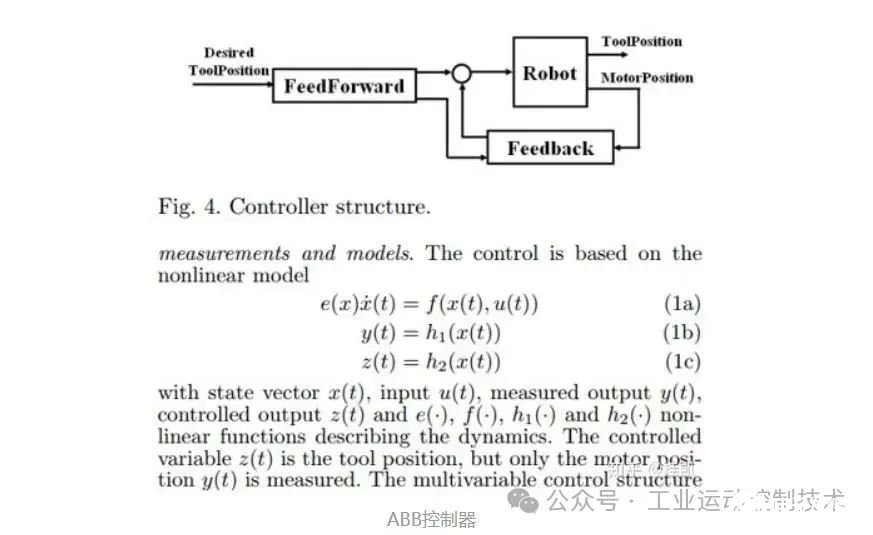
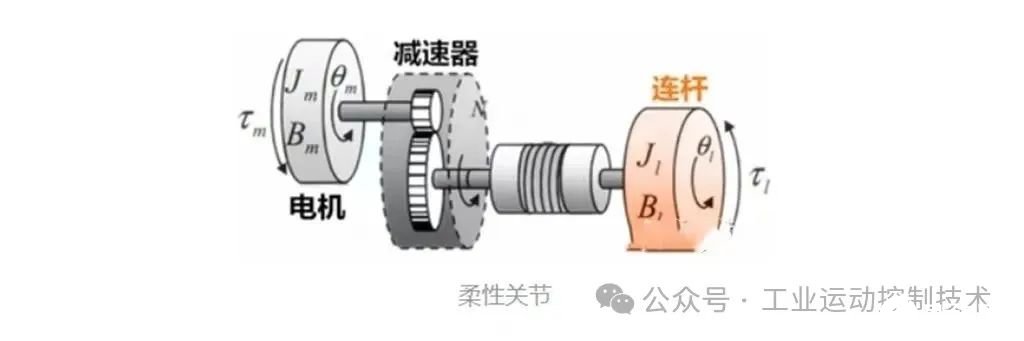
高級(jí)控制 前面的控制中都是將機(jī)械臂看做是完全剛性的,然而實(shí)際的材料都是有柔性的。 機(jī)械臂的柔性可歸結(jié)為連桿的柔性及關(guān)節(jié)的柔性,這其中機(jī)械臂70~80%的柔性是由關(guān)節(jié)減速器及傳動(dòng)元件等引起的。 在上圖ABB的控制器框圖中,也區(qū)分了tool position與motor position。這種控制策略中普遍需要電機(jī)端位置反饋及連桿端位置反饋。
該類機(jī)械臂控制中會(huì)對(duì)關(guān)節(jié)柔性部分進(jìn)行建模及辨識(shí)。 此外,機(jī)械臂中一般只有電機(jī)端安裝有編碼器,這種控制在實(shí)際使用中還涉及到如何有效且方便地估計(jì)連桿的位置。 在后續(xù)的文章中,我們會(huì)討論關(guān)于關(guān)節(jié)剛度辨識(shí)及連桿位置估計(jì)等問題。
3.總結(jié)
機(jī)器人控制器能發(fā)揮出最大性能,需要機(jī)器人結(jié)構(gòu)、裝配、系統(tǒng)辨識(shí)、狀態(tài)估計(jì)、控制周期、控制方法等多方面來共同保證的。 機(jī)器人非線性控制策略是學(xué)術(shù)上的研究熱點(diǎn),然而國(guó)內(nèi)工程師普遍對(duì)這些不太感冒,覺得前兩種控制策略足夠好了。 將非線性控制策略與三環(huán)控制策略結(jié)合在一起,并考慮關(guān)節(jié)柔性,可充分發(fā)揮理論的能力,或許可以在實(shí)踐中獲取更好的效果。
『科瑞特自動(dòng)化技術(shù)』專業(yè)提供工業(yè)自動(dòng)化運(yùn)動(dòng)控制技術(shù)及解決方案!
---(激光)焊接、拋光、切割、直坐標(biāo)機(jī)器人(桁架機(jī)械手)、等特種數(shù)控設(shè)備運(yùn)動(dòng)控制系統(tǒng),(步進(jìn)電機(jī)、伺服電機(jī)、驅(qū)動(dòng)器、電源)。
審核編輯 黃宇
-
控制器
+關(guān)注
關(guān)注
114文章
16838瀏覽量
182216 -
位置控制
+關(guān)注
關(guān)注
0文章
23瀏覽量
9538 -
機(jī)械臂
+關(guān)注
關(guān)注
13文章
540瀏覽量
25122
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
SME150磁性位置編碼器在機(jī)械臂中的應(yīng)用
海康威視推出大模型機(jī)械臂防碰撞相機(jī)
宜科EI40編碼器助力提升機(jī)高效搬運(yùn)
為控制Mercury X1和Mercury B1機(jī)械臂而設(shè)計(jì)的創(chuàng)新外骨骼

如何使用PLC控制myCobot 320機(jī)械臂

深度解析!RK3568 加持機(jī)械臂是如何實(shí)現(xiàn)顏色識(shí)別與抓取的?

RK3568國(guó)產(chǎn)實(shí)驗(yàn)箱+人工智能機(jī)械臂:跳舞、疊羅漢、夾方塊、積木搬運(yùn)案例全解!
機(jī)械臂的高效運(yùn)作,連接器起關(guān)鍵作用
提升機(jī)電機(jī)軸承溫度及振動(dòng)監(jiān)測(cè)裝置
OrangePi AIpro應(yīng)用:機(jī)械臂應(yīng)用開發(fā)指南

國(guó)產(chǎn)Cortex-A55高性能人工智能實(shí)驗(yàn)箱機(jī)械臂姿態(tài)識(shí)別案例
大象機(jī)器人開源協(xié)作機(jī)械臂機(jī)械臂接入GPT4o大模型!

國(guó)產(chǎn)Cortex-A55人工智能教學(xué)實(shí)驗(yàn)箱_基于Python機(jī)械臂跳舞實(shí)驗(yàn)案例分享
基于六維力傳感器的機(jī)械臂自動(dòng)裝配應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論