") 為控制Mercury X1和Mercury B1機(jī)械臂而設(shè)計(jì)的創(chuàng)新外骨骼
為控制Mercury X1和Mercury B1機(jī)械臂而設(shè)計(jì)的創(chuàng)新外骨骼

今天,我們將介紹一款專為控制 Mercury X1 和 Mercury B1 機(jī)械臂而設(shè)計(jì)的創(chuàng)新外骨骼。這種外骨骼以人類手臂的結(jié)構(gòu)為藍(lán)本,可實(shí)現(xiàn)直觀和精確的控制。
開發(fā)這種外骨骼的動(dòng)機(jī)源于人們對(duì)深度學(xué)習(xí)和機(jī)器學(xué)習(xí)等領(lǐng)域日益增長的興趣。這些技術(shù)使機(jī)器人能夠自主學(xué)習(xí)和執(zhí)行人類任務(wù),例如折疊衣服或做飯。為了實(shí)現(xiàn)這些功能,必須收集大量數(shù)據(jù),并且必須采用一種便捷的方式來控制機(jī)械臂。設(shè)計(jì)這種外骨骼的主要目標(biāo)是滿足這一需求。
項(xiàng)目硬件介紹
大象機(jī)器人 Mercury X1
M5Stack ESP32 基礎(chǔ)核心物聯(lián)網(wǎng)開發(fā)套件
NVIDIA Jetson Orin Nano 開發(fā)者套件
ROS 機(jī)器人操作系統(tǒng)
Elephant Robotics myCobot Pro 自適應(yīng)夾爪
產(chǎn)品介紹
Mercury X1
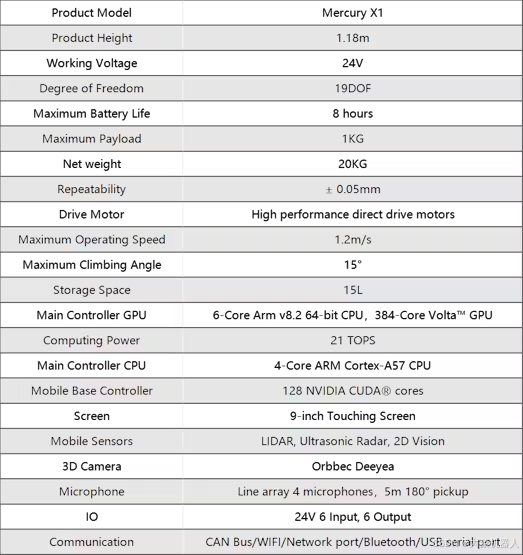
Mercury X1 由 Elephant Robotics 開發(fā),是一款先進(jìn)的人形機(jī)器人,旨在處理各種自動(dòng)化任務(wù)。它擁有 19 個(gè) DOF(每臂 7 個(gè) DOF),在手術(shù)過程中提供了卓越的靈活性和適應(yīng)性。Mercury X1 采用由高性能直驅(qū)電機(jī)驅(qū)動(dòng)的輪式移動(dòng)底座,確保在復(fù)雜環(huán)境中穩(wěn)定移動(dòng),電池續(xù)航時(shí)間長達(dá) 8 小時(shí)。Mercury X1 配備了由 NVIDIA Jetson Xavier 提供支持的高性能主控制器系統(tǒng),支持視覺測(cè)距、傳感器融合、定位和建圖、障礙物檢測(cè)和路徑規(guī)劃的復(fù)雜算法。移動(dòng)底座配備了 LiDAR、超聲波傳感器和 2D 視覺系統(tǒng),可實(shí)現(xiàn)高度感知的環(huán)境交互。
外骨骼
這款創(chuàng)新的外骨骼專為遠(yuǎn)程控制和數(shù)據(jù)收集而設(shè)計(jì)。其結(jié)構(gòu)由 2 個(gè)以人體解剖結(jié)構(gòu)為藍(lán)本的手臂組件組成,并與 Mercury X1 的雙臂運(yùn)動(dòng)結(jié)構(gòu)保持一致,可以精確模仿人類手臂運(yùn)動(dòng)。中心嵌入了一個(gè) M5Stack Basic 模塊,作為主控單元,提供強(qiáng)大的計(jì)算能力和靈活的接口。外骨骼旨在提供舒適的佩戴體驗(yàn),同時(shí)確保高精度的運(yùn)動(dòng)跟蹤和數(shù)據(jù)收集,以支持機(jī)器人操作和機(jī)器學(xué)習(xí)訓(xùn)練。
開發(fā)挑戰(zhàn)
初始設(shè)計(jì)限制
第一代外骨骼安裝在操作員的肩膀上。雖然這種設(shè)計(jì)看起來很有效,但在實(shí)際操作中被證明很麻煩。用戶必須顯著抬高手臂和肘部才能正確控制 Mercury X1,從而導(dǎo)致不適和效率低下。
電源和連接問題
初始版本需要直接連接到充電器,因此需要三到四根電纜連接到設(shè)備。這種設(shè)置創(chuàng)造了一個(gè)錯(cuò)綜復(fù)雜的工作空間。
操作員疲勞
使用外骨骼的物理壓力在操作僅 5 分鐘后就變得明顯,導(dǎo)致用戶迅速疲勞。這些缺點(diǎn)突出了進(jìn)行大量升級(jí)的必要性,并導(dǎo)致了改進(jìn)版本的開發(fā)。
最新升級(jí)
我們目前的設(shè)計(jì)已經(jīng)解決了之前的大部分痛點(diǎn)。新的外骨骼具有懸掛在胸部前方的手臂,并通過中心桿連接,確保兩側(cè)之間的平衡。以前對(duì)外部電源的依賴已被中央 M5Stack Basic 模塊中的內(nèi)置可充電電池所取代。這消除了對(duì)多個(gè)拖曳充電器的需求,從而顯著減少了雜亂。現(xiàn)在,只需一根電纜即可將 M5Stack Basic 連接到 Mercury X1,從而高效傳輸數(shù)據(jù)并簡化設(shè)置。
實(shí)現(xiàn)細(xì)節(jié)
● 操作系統(tǒng):Ubuntu 20.04
● 編程語言:Python
● 使用的庫:pymycobot、threading、time、serial
該程序的工作原理是從外骨骼上的磁性編碼器讀取數(shù)據(jù),將電位值轉(zhuǎn)換為機(jī)械臂可以解釋和執(zhí)行的角度。盡管代碼不到 100 行,但該程序?qū)崿F(xiàn)了控制機(jī)械臂的基本功能。
def read_data(): while True: try: # read left robot data ser.write(hex_array_l) time.sleep(0.01) count = ser.in_waiting data = ser.read(count).hex() tim = time.time() #print("l:"+data+","+str(tim)) if len(data) == 84 and data[0:2] == "d5" and data[-2:] == "5d": for i in range(7): data_h = data[8 + i * 10: 10 + i * 10] data_l = data[10 + i * 10: 12 + i * 10] encode = int(data_h + data_l, 16) # l_angle_list[i] = (encode - 2048) * 180 / 2048 if encode != 2048 else 0 if encode == 2048: angle = 0 elif encode < 2048: angle = -180 * (2048 - encode) / 2048 else: angle = 180 * (encode - 2048) / 2048 l_angle_list[i] = angle button = bin(int(data[-10: -8]))[2:].rjust(4, "0") l_atom_list[0] = int(button[1]) l_atom_list[1] = int(button[2]) l_atom_list[2] = int(data[-6: -4], 16) l_atom_list[3] = int(data[-4: -2], 16) print("Left Arm Angles:", l_angle_list)基于此基本設(shè)置,可以記錄特定運(yùn)動(dòng)期間的關(guān)節(jié)參數(shù)并用于訓(xùn)練機(jī)器學(xué)習(xí)模型,從而有助于為后續(xù)算法開發(fā)收集有價(jià)值的數(shù)據(jù)。
展望
展望未來,我們?cè)O(shè)想通過觸覺反饋和自適應(yīng)運(yùn)動(dòng)算法等高級(jí)功能來增強(qiáng)外骨骼,以進(jìn)一步彌合人類控制和機(jī)器人精度之間的差距。這些改進(jìn)將為操作員提供更身臨其境的體驗(yàn),提供實(shí)時(shí)傳感反饋,并允許在操作過程中進(jìn)行更直觀的調(diào)整。此外,我們計(jì)劃擴(kuò)展外骨骼的兼容性,以便與更廣泛的機(jī)器人平臺(tái)配合使用,從而在制造、醫(yī)療保健和研究等各個(gè)行業(yè)實(shí)現(xiàn)更廣泛的應(yīng)用。這一進(jìn)展將支持更廣泛的數(shù)據(jù)收集,并促進(jìn)可以處理日益復(fù)雜任務(wù)的協(xié)作人機(jī)系統(tǒng)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29730瀏覽量
212824 -
Mercury
+關(guān)注
關(guān)注
0文章
5瀏覽量
7123 -
機(jī)械臂
+關(guān)注
關(guān)注
13文章
554瀏覽量
25376 -
大象機(jī)器人
+關(guān)注
關(guān)注
0文章
86瀏覽量
121
原文標(biāo)題:利用外骨骼控制 Mercury X1案例發(fā)布!以更靈活的方式操作你的機(jī)器人
文章出處:【微信號(hào):ElephantRobotics,微信公眾號(hào):大象機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
帶增益的 RX 分集 FEM(B26、B8、B20、B1/4、B3 和 B7) skyworksinc

從機(jī)械傳動(dòng)到智能協(xié)同,雅特力助力外骨骼機(jī)器人應(yīng)用創(chuàng)新發(fā)展

帶增益的 RX 分集 FEM(B3、B39、B1、B40、B41 和 B7) skyworksinc
外骨骼機(jī)器人產(chǎn)業(yè)鏈的機(jī)遇與挑戰(zhàn)
Wandercraft借助NVIDIA技術(shù)開發(fā)個(gè)人外骨骼設(shè)備
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
訊飛星火X1全新升級(jí)
華為路由X1系列正式發(fā)布
具有載波聚合的 RX 分集 FEM(B26、B8、B20、B1/4、B3 和 B7) skyworksinc
電線b1級(jí)和b2級(jí)阻燃的區(qū)別
PIX Moving宣布完成B1輪融資
步行助力外骨骼機(jī)器人
示波器探頭x1和x10表示什么意思
大象機(jī)器人水星MercuryX1輪式人形機(jī)器人基于物體標(biāo)記建模的鍵盤點(diǎn)按操作!

示波器探頭X1和X10對(duì)峰值電壓的影響





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論