") 淺談伺服電機(jī)的控制模式
淺談伺服電機(jī)的控制模式
一、引言
伺服電機(jī)作為現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中不可或缺的重要組成部分,其控制模式的精確性和多樣性對(duì)于實(shí)現(xiàn)高效、穩(wěn)定、準(zhǔn)確的運(yùn)動(dòng)控制至關(guān)重要。本文將詳細(xì)介紹伺服電機(jī)的三種主要控制模式:位置控制模式、速度控制模式和轉(zhuǎn)矩控制模式,并結(jié)合實(shí)際應(yīng)用場(chǎng)景,闡述各種控制模式的特點(diǎn)、優(yōu)缺點(diǎn)以及適用場(chǎng)景。
二、伺服電機(jī)控制模式概述
伺服電機(jī)的控制模式主要分為三種:位置控制模式、速度控制模式和轉(zhuǎn)矩控制模式。這三種控制模式在伺服系統(tǒng)中分別扮演著不同的角色,根據(jù)實(shí)際應(yīng)用需求選擇合適的控制模式對(duì)于提高系統(tǒng)的性能和穩(wěn)定性具有重要意義。
三、位置控制模式
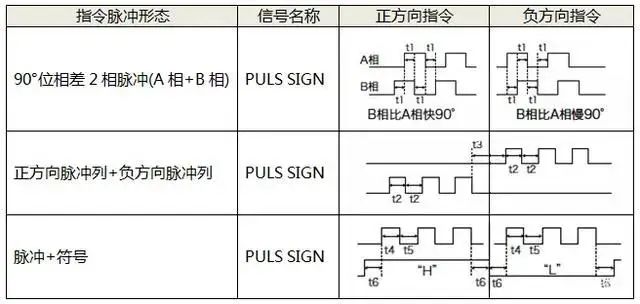
位置控制模式是伺服電機(jī)最常見的控制模式之一。其工作原理是通過設(shè)定目標(biāo)位置,讓伺服電機(jī)運(yùn)動(dòng)到指定位置并保持穩(wěn)定。位置控制模式主要依賴于編碼器返回的脈沖信號(hào),通過控制發(fā)送脈沖的頻率和個(gè)數(shù)來確定電機(jī)的轉(zhuǎn)動(dòng)速度和角度。
特點(diǎn)
位置控制模式具有高精度、穩(wěn)定性好、控制方式簡單易懂等特點(diǎn)。它適用于需要定位控制的場(chǎng)合,如機(jī)械手、貼片機(jī)、雕刻機(jī)、數(shù)控機(jī)床等自動(dòng)化設(shè)備。此外,位置控制模式還可以細(xì)分為絕對(duì)位置模式和相對(duì)位置模式,以滿足不同應(yīng)用場(chǎng)景的需求。
優(yōu)缺點(diǎn)
位置控制模式的優(yōu)點(diǎn)是精度高、穩(wěn)定性好,適用范圍廣泛。然而,其控制響應(yīng)時(shí)間相對(duì)較慢,不適用于需要快速反應(yīng)的場(chǎng)景。此外,位置控制模式的控制成本相對(duì)較高,需要配備高性能的伺服驅(qū)動(dòng)器和編碼器。
四、速度控制模式
工作原理
速度控制模式是控制伺服電機(jī)運(yùn)動(dòng)速度的一種模式。其工作原理是通過設(shè)定目標(biāo)速度實(shí)現(xiàn)電機(jī)的穩(wěn)定運(yùn)動(dòng)。速度控制模式可以通過模擬量的輸入或脈沖的頻率來進(jìn)行轉(zhuǎn)動(dòng)速度的控制。在有上位控制裝置的外環(huán)PID控制時(shí),速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號(hào)或直接負(fù)載的位置信號(hào)給上位反饋以做運(yùn)算用。
特點(diǎn)
速度控制模式具有響應(yīng)速度快、精度高等特點(diǎn)。它適用于需要保證運(yùn)動(dòng)速度恒定的場(chǎng)景,如模具加工、流水線、印刷設(shè)備等。此外,速度控制模式還可以實(shí)現(xiàn)寬范圍的速度調(diào)節(jié),速度波動(dòng)小,對(duì)于提高生產(chǎn)效率和產(chǎn)品質(zhì)量具有重要意義。
優(yōu)缺點(diǎn)
速度控制模式的優(yōu)點(diǎn)是響應(yīng)速度快、精度高,適用范圍廣泛。然而,在高扭矩負(fù)載下容易出現(xiàn)控制失效的情況,且控制成本相對(duì)較高。此外,速度控制模式對(duì)于電機(jī)的動(dòng)態(tài)性能要求較高,需要選用高性能的伺服電機(jī)和驅(qū)動(dòng)器。
五、轉(zhuǎn)矩控制模式
工作原理
轉(zhuǎn)矩控制模式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小。具體表現(xiàn)為例如10V對(duì)應(yīng)5Nm的話,當(dāng)外部模擬量設(shè)定為5V時(shí)電機(jī)軸輸出為2.5Nm。轉(zhuǎn)矩與電流是直接相關(guān),控制轉(zhuǎn)矩就是控制電流,需要檢測(cè)伺服驅(qū)動(dòng)器的輸出電流,根據(jù)電流反饋信號(hào)進(jìn)行轉(zhuǎn)矩控制。
特點(diǎn)
轉(zhuǎn)矩控制模式具有控制力矩精確、對(duì)材質(zhì)受力要求嚴(yán)格等特點(diǎn)。它主要應(yīng)用在對(duì)材質(zhì)的受力有嚴(yán)格要求的纏繞和放卷的裝置中,如饒線裝置或拉光纖設(shè)備。在這些應(yīng)用中,轉(zhuǎn)矩的設(shè)定需要根據(jù)纏繞的半徑的變化隨時(shí)更改以確保材質(zhì)的受力不會(huì)隨著纏繞半徑的變化而改變。
優(yōu)缺點(diǎn)
轉(zhuǎn)矩控制模式的優(yōu)點(diǎn)是能夠?qū)崿F(xiàn)對(duì)力矩的精確控制,滿足對(duì)材質(zhì)受力要求嚴(yán)格的應(yīng)用場(chǎng)景。然而,其控制成本較高,需要配備高性能的伺服驅(qū)動(dòng)器和電流檢測(cè)裝置。此外,轉(zhuǎn)矩控制模式對(duì)于電機(jī)的動(dòng)態(tài)性能要求較高,需要選用高性能的伺服電機(jī)。
六、總結(jié)
伺服電機(jī)的三種控制模式各有特點(diǎn),適用于不同的應(yīng)用場(chǎng)景。在實(shí)際應(yīng)用中,需要根據(jù)具體需求選擇合適的控制模式以提高系統(tǒng)的性能和穩(wěn)定性。同時(shí),隨著技術(shù)的不斷發(fā)展和創(chuàng)新,伺服電機(jī)的控制模式也將不斷完善和優(yōu)化,為工業(yè)自動(dòng)化領(lǐng)域的發(fā)展提供更加強(qiáng)大的支持。
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8635瀏覽量
149081 -
伺服電機(jī)
+關(guān)注
關(guān)注
87文章
2101瀏覽量
59159 -
控制模式
+關(guān)注
關(guān)注
0文章
25瀏覽量
8451
發(fā)布評(píng)論請(qǐng)先 登錄
淺談伺服電機(jī)各種運(yùn)行模式
伺服電機(jī)的三種控制場(chǎng)景模式
PLC如何控制伺服電機(jī)?如何設(shè)計(jì)伺服系統(tǒng)?

淺談伺服電機(jī)的三種控制方式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論