") 伺服驅動器過載時間是累計的嗎
伺服驅動器過載時間是累計的嗎

伺服驅動器過載時間是否累計,這個問題需要從伺服驅動器的工作原理、過載保護機制以及實際應用場景等方面進行詳細分析。
伺服驅動器是一種高精度、高響應速度的電機驅動裝置,廣泛應用于工業(yè)自動化、機器人、數(shù)控機床等領域。伺服驅動器的核心功能是接收控制器的指令信號,精確控制電機的轉速、位置和力矩,以實現(xiàn)對機械設備的精確控制。在實際應用中,伺服驅動器需要承受各種負載變化和環(huán)境影響,因此其過載保護功能至關重要。
一、伺服驅動器的工作原理
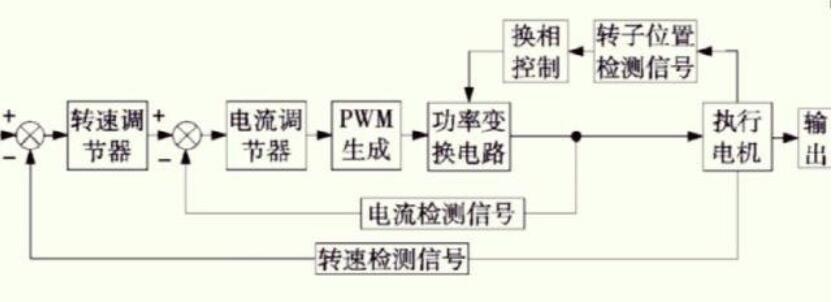
伺服驅動器主要由功率模塊、控制模塊和接口模塊組成。功率模塊負責將輸入的電能轉換為電機所需的電能,控制模塊負責接收控制器的指令信號并生成相應的控制信號,接口模塊則負責與外部設備進行通信和數(shù)據(jù)交換。
伺服驅動器的工作原理可以概括為以下幾個步驟:
- 控制器發(fā)送指令信號給伺服驅動器,指令信號包括速度、位置和力矩等信息。
- 伺服驅動器的控制模塊接收指令信號,并根據(jù)指令信號計算出所需的電機控制參數(shù)。
- 控制模塊將計算出的控制參數(shù)傳遞給功率模塊,功率模塊根據(jù)控制參數(shù)調整電機的供電電壓和電流。
- 電機根據(jù)功率模塊提供的電壓和電流進行運動,實現(xiàn)對機械設備的精確控制。
- 伺服驅動器通過接口模塊與控制器進行實時通信,反饋電機的實際運行狀態(tài)。
二、伺服驅動器的過載保護機制
伺服驅動器在運行過程中,可能會遇到各種過載情況,如負載突然增大、電源電壓波動等。為了保護伺服驅動器和電機不受損壞,伺服驅動器通常具備過載保護功能。過載保護機制主要包括以下幾個方面:
- 電流檢測:伺服驅動器實時監(jiān)測電機的電流,當電流超過設定的過載電流閾值時,觸發(fā)過載保護。
- 溫度檢測:伺服驅動器內部的功率模塊和電機在運行過程中會產(chǎn)生熱量,當溫度超過設定的安全閾值時,觸發(fā)過載保護。
- 電壓檢測:伺服驅動器實時監(jiān)測電源電壓,當電壓超過設定的安全范圍時,觸發(fā)過載保護。
- 速度檢測:伺服驅動器實時監(jiān)測電機的運行速度,當速度超過設定的最大速度閾值時,觸發(fā)過載保護。
三、伺服驅動器過載時間的累計問題
伺服驅動器在過載保護觸發(fā)后,通常會采取一定的措施,如降低電機的運行速度、減小電機的力矩輸出等,以減輕過載對伺服驅動器和電機的影響。在某些情況下,伺服驅動器的過載時間是會累計的,但這主要取決于過載保護的具體實現(xiàn)方式和應用場景。
- 累計過載時間的實現(xiàn)方式:在某些伺服驅動器中,過載保護功能會記錄每次過載事件的發(fā)生時間和持續(xù)時間。當過載時間累計達到設定的閾值時,伺服驅動器會采取更嚴格的保護措施,如停機、報警等。
- 累計過載時間的應用場景:在一些對設備穩(wěn)定性和可靠性要求較高的應用場景中,如高精度加工、機器人操作等,累計過載時間的監(jiān)控和處理尤為重要。通過累計過載時間,可以及時發(fā)現(xiàn)伺服驅動器和電機的異常情況,避免設備損壞和生產(chǎn)事故。
四、如何優(yōu)化伺服驅動器的過載保護
為了提高伺服驅動器的穩(wěn)定性和可靠性,減少過載對設備的影響,可以采取以下幾種措施優(yōu)化過載保護:
- 合理設置過載保護參數(shù):根據(jù)實際應用場景和設備性能,合理設置過載電流、溫度、電壓和速度等保護參數(shù),避免過載保護過于敏感或過于寬松。
- 增強伺服驅動器的散熱性能:通過優(yōu)化伺服驅動器的散熱設計,提高功率模塊和電機的散熱效率,降低過載時的溫度上升速度。
- 提高電源穩(wěn)定性:通過使用穩(wěn)壓電源、濾波器等設備,提高伺服驅動器的電源穩(wěn)定性,減少電源波動對過載保護的影響。
- 增加過載保護的智能化:通過引入先進的算法和傳感器技術,實現(xiàn)過載保護的自適應調整和智能診斷,提高過載保護的準確性和響應速度。
五、總結
伺服驅動器過載時間是否累計,取決于過載保護的具體實現(xiàn)方式和應用場景。在一些對設備穩(wěn)定性和可靠性要求較高的應用場景中,累計過載時間的監(jiān)控和處理尤為重要。
-
過載保護
+關注
關注
1文章
149瀏覽量
12859 -
工業(yè)自動化
+關注
關注
17文章
2704瀏覽量
68225 -
伺服驅動器
+關注
關注
22文章
520瀏覽量
32488
發(fā)布評論請先 登錄

伺服驅動器的工作原理_伺服驅動器內部結構





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論