") PLC控制伺服驅(qū)動器的主要方式
PLC控制伺服驅(qū)動器的主要方式
一、引言
在工業(yè)自動化領(lǐng)域中,伺服驅(qū)動器作為控制伺服電機(jī)運行的關(guān)鍵設(shè)備,其性能的穩(wěn)定性和控制精度對于整個生產(chǎn)線的運行效率具有重要影響。而PLC(可編程邏輯控制器)作為工業(yè)自動化控制的核心,如何有效地控制伺服驅(qū)動器,實現(xiàn)伺服電機(jī)的精確控制,是工業(yè)自動化技術(shù)發(fā)展的重要方向之一。本文將從PLC控制伺服驅(qū)動器的基本原理、主要方式、實現(xiàn)步驟以及應(yīng)用實例等方面進(jìn)行詳細(xì)解析。
二、PLC控制伺服驅(qū)動器的基本原理
PLC控制伺服驅(qū)動器的基本原理是通過編寫相應(yīng)的控制程序,向伺服驅(qū)動器發(fā)送控制信號,從而實現(xiàn)對伺服電機(jī)的精確控制。具體來說,PLC通過接收外部輸入信號(如按鈕、傳感器等),根據(jù)預(yù)設(shè)的控制邏輯,輸出相應(yīng)的控制信號給伺服驅(qū)動器。伺服驅(qū)動器再根據(jù)這些信號控制伺服電機(jī)的運行,如位置、速度、加速度等。
三、PLC控制伺服驅(qū)動器的主要方式
PLC控制伺服驅(qū)動器的方式主要有三種:轉(zhuǎn)矩控制、位置控制和速度控制。
轉(zhuǎn)矩控制
轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址賦值來設(shè)定電機(jī)軸對外的輸出轉(zhuǎn)矩的大小。具體來說,PLC可以通過模擬量輸出模塊向伺服驅(qū)動器發(fā)送轉(zhuǎn)矩設(shè)定值,伺服驅(qū)動器根據(jù)這個設(shè)定值控制伺服電機(jī)的輸出轉(zhuǎn)矩。轉(zhuǎn)矩控制方式適用于需要精確控制輸出轉(zhuǎn)矩的場合,如材料處理、張力控制等。
位置控制
位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉(zhuǎn)動速度的大小,通過脈沖的個數(shù)來確定轉(zhuǎn)動的角度。PLC可以通過高速脈沖輸出模塊向伺服驅(qū)動器發(fā)送脈沖信號,伺服驅(qū)動器根據(jù)這些信號控制伺服電機(jī)的位置和速度。位置控制模式適用于需要精確定位和速度控制的場合,如機(jī)床加工、機(jī)器人控制等。
速度控制
速度控制模式是通過模擬量的輸入或脈沖的頻率來進(jìn)行轉(zhuǎn)動速度的控制。PLC可以通過模擬量輸出模塊或高速脈沖輸出模塊向伺服驅(qū)動器發(fā)送速度設(shè)定值,伺服驅(qū)動器根據(jù)這個設(shè)定值控制伺服電機(jī)的運行速度。速度控制模式適用于需要連續(xù)速度調(diào)節(jié)的場合,如輸送帶、攪拌機(jī)等。
四、PLC控制伺服驅(qū)動器的實現(xiàn)步驟
確定控制需求
首先,需要明確需要控制的伺服驅(qū)動器的具體需求,如位置、速度、加速度等。這是選擇合適的PLC和伺服驅(qū)動器的基礎(chǔ)。
選擇合適的PLC和伺服驅(qū)動器
根據(jù)控制需求選擇合適的PLC和伺服驅(qū)動器,確保設(shè)備之間的兼容性和性能匹配。在選擇過程中,需要考慮設(shè)備的品牌、型號、規(guī)格、性能參數(shù)等因素。
編寫PLC控制程序
根據(jù)控制需求和硬件設(shè)備編寫PLC控制程序。程序需要包括輸入信號處理、控制邏輯判斷、輸出信號控制等內(nèi)容。在編寫過程中,需要了解PLC的編程語言、編程軟件、編程規(guī)范等基本知識。
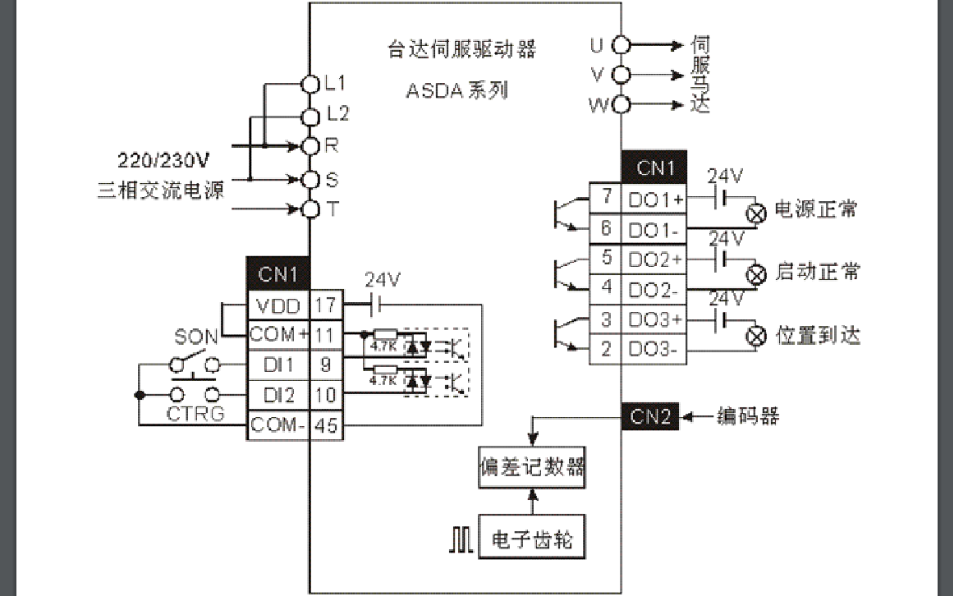
連接PLC和伺服驅(qū)動器
根據(jù)設(shè)備制造商提供的接線圖和說明,將PLC和伺服驅(qū)動器進(jìn)行正確連接。連接方式主要包括數(shù)字輸入/輸出、模擬輸入/輸出、高速計數(shù)器/編碼器以及通信總線等。
調(diào)試和測試
完成連接后,進(jìn)行調(diào)試和測試。通過模擬實際工作環(huán)境,測試PLC控制伺服驅(qū)動器的效果和性能。在調(diào)試過程中,需要注意檢查程序的正確性、連接的正確性以及設(shè)備的運行狀態(tài)等。
五、應(yīng)用實例
以某機(jī)床加工生產(chǎn)線為例,該生產(chǎn)線采用PLC控制伺服驅(qū)動器的方式實現(xiàn)對機(jī)床的精確控制。具體來說,PLC通過接收傳感器信號和按鈕信號等外部輸入信號,根據(jù)預(yù)設(shè)的控制邏輯判斷機(jī)床的運行狀態(tài)和需求。然后,PLC通過高速脈沖輸出模塊向伺服驅(qū)動器發(fā)送脈沖信號,伺服驅(qū)動器根據(jù)這些信號控制伺服電機(jī)的位置和速度。通過這種方式,實現(xiàn)了對機(jī)床的精確控制,提高了生產(chǎn)線的運行效率和加工精度。
六、結(jié)論
PLC控制伺服驅(qū)動器是實現(xiàn)工業(yè)自動化控制的重要手段之一。通過編寫相應(yīng)的控制程序,PLC可以實現(xiàn)對伺服驅(qū)動器的精確控制,從而實現(xiàn)對伺服電機(jī)的精確控制。在實際應(yīng)用中,需要根據(jù)具體的控制需求和硬件設(shè)備選擇合適的PLC和伺服驅(qū)動器,并編寫相應(yīng)的控制程序。同時,需要注意連接的正確性和調(diào)試的充分性,以確保整個控制系統(tǒng)的穩(wěn)定性和可靠性。
-
控制器
+關(guān)注
關(guān)注
112文章
16465瀏覽量
179615 -
plc
+關(guān)注
關(guān)注
5017文章
13392瀏覽量
465642 -
伺服驅(qū)動器
+關(guān)注
關(guān)注
22文章
490瀏覽量
31802
發(fā)布評論請先 登錄
相關(guān)推薦
西門子Smart的PLC項目_PLC雙脈沖模式控制伺服驅(qū)動器正反轉(zhuǎn)
基于ARES直流伺服驅(qū)動器技術(shù)應(yīng)用

臺達(dá)ASDA系列伺服驅(qū)動器PLC的控制實例參數(shù)設(shè)置及PLC程序免費下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論