") plc控制伺服驅(qū)動(dòng)器編程實(shí)例介紹
plc控制伺服驅(qū)動(dòng)器編程實(shí)例介紹
在現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域,可編程邏輯控制器(PLC)和伺服驅(qū)動(dòng)器的組合應(yīng)用非常廣泛。PLC 控制伺服驅(qū)動(dòng)器可以實(shí)現(xiàn)精確的速度、位置和力矩控制,廣泛應(yīng)用于機(jī)械手、輸送帶、數(shù)控機(jī)床等多種自動(dòng)化設(shè)備。本文將詳細(xì)介紹 PLC 控制伺服驅(qū)動(dòng)器的編程實(shí)例。
1. 伺服驅(qū)動(dòng)器與 PLC 的基本概念
伺服驅(qū)動(dòng)器 :伺服驅(qū)動(dòng)器是一種將電信號(hào)轉(zhuǎn)換為機(jī)械運(yùn)動(dòng)的裝置,通常用于精確控制電機(jī)的速度、位置和力矩。
PLC :可編程邏輯控制器(Programmable Logic Controller)是一種用于工業(yè)自動(dòng)化控制的數(shù)字操作電子系統(tǒng),具有高度的可靠性、靈活性和易用性。
2. 系統(tǒng)組成
一個(gè)典型的 PLC 控制伺服驅(qū)動(dòng)器系統(tǒng)通常包括以下部分:
- PLC :作為控制系統(tǒng)的大腦,負(fù)責(zé)接收輸入信號(hào)、處理邏輯并輸出控制信號(hào)。
- 伺服驅(qū)動(dòng)器 :接收 PLC 的控制信號(hào),驅(qū)動(dòng)伺服電機(jī)實(shí)現(xiàn)精確運(yùn)動(dòng)。
- 伺服電機(jī) :執(zhí)行機(jī)構(gòu),根據(jù)伺服驅(qū)動(dòng)器的指令進(jìn)行運(yùn)動(dòng)。
- 傳感器 :用于檢測系統(tǒng)狀態(tài),如位置、速度等,并將信息反饋給 PLC。
3. 通信協(xié)議
在 PLC 和伺服驅(qū)動(dòng)器之間進(jìn)行通信時(shí),通常使用以下幾種協(xié)議:
- RS-232/RS-485 :串行通信協(xié)議,適用于短距離通信。
- EtherCAT :一種高速以太網(wǎng)通信協(xié)議,適用于實(shí)時(shí)性要求高的場合。
- Modbus :一種應(yīng)用層協(xié)議,常用于工業(yè)自動(dòng)化領(lǐng)域。
4. PLC 編程基礎(chǔ)
在進(jìn)行 PLC 控制伺服驅(qū)動(dòng)器編程之前,需要了解以下基本概念:
- 輸入/輸出(I/O) :PLC 的輸入和輸出端口,用于與外部設(shè)備進(jìn)行數(shù)據(jù)交換。
- 寄存器 :PLC 中用于存儲(chǔ)數(shù)據(jù)的內(nèi)存區(qū)域。
- 指令 :PLC 編程語言的基本單元,用于實(shí)現(xiàn)特定的控制邏輯。
5. 編程實(shí)例
5.1 系統(tǒng)需求
假設(shè)我們需要控制一個(gè)簡單的直線運(yùn)動(dòng)平臺(tái),使其能夠根據(jù) PLC 的指令在兩個(gè)固定位置之間移動(dòng)。
5.2 硬件配置
- PLC:選擇一個(gè)具有足夠 I/O 點(diǎn)和通信接口的型號(hào)。
- 伺服驅(qū)動(dòng)器:選擇一個(gè)與 PLC 兼容的型號(hào),具有位置控制功能。
- 伺服電機(jī):與伺服驅(qū)動(dòng)器匹配的型號(hào)。
- 傳感器:用于檢測平臺(tái)位置的光電傳感器。
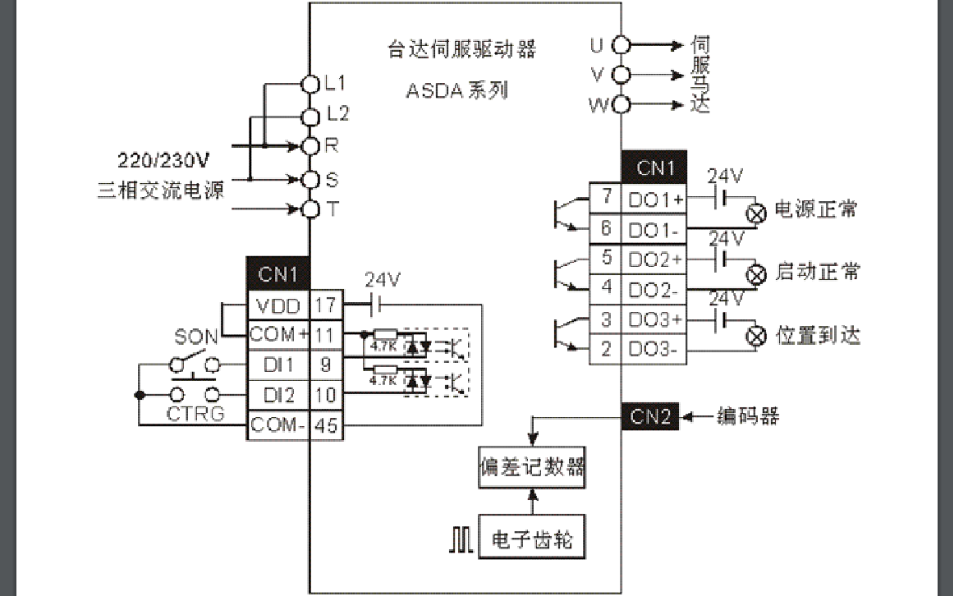
5.3 接線
- 將伺服驅(qū)動(dòng)器的控制信號(hào)線連接到 PLC 的輸出端口。
- 將傳感器的信號(hào)線連接到 PLC 的輸入端口。
5.4 編程步驟
- 初始化 :設(shè)置 PLC 的輸入/輸出端口,初始化寄存器和變量。
- 定義常量和變量 :
- 定義兩個(gè)位置的編碼值:
POS1和POS2。 - 定義當(dāng)前位置變量:
currentPos。
- 主控制邏輯 :
- 使用一個(gè)按鈕或傳感器信號(hào)作為啟動(dòng)條件。
- 讀取傳感器信號(hào),更新
currentPos。 - 根據(jù)
currentPos與POS1、POS2的比較結(jié)果,計(jì)算目標(biāo)位置。
- 運(yùn)動(dòng)控制 :
- 發(fā)送目標(biāo)位置到伺服驅(qū)動(dòng)器。
- 使用 PLC 的定時(shí)器監(jiān)控運(yùn)動(dòng)狀態(tài),確保到達(dá)目標(biāo)位置。
- 異常處理 :
- 檢測伺服驅(qū)動(dòng)器的狀態(tài),處理可能的故障。
- 優(yōu)化和調(diào)試 :
- 根據(jù)實(shí)際運(yùn)行情況調(diào)整參數(shù),如加速度、減速度等。
- 調(diào)試程序,確保系統(tǒng)穩(wěn)定運(yùn)行。
6. 編程示例代碼(偽代碼)
// 初始化
init_plc();
init_servo_driver();
// 主循環(huán)
while (true) {
// 讀取輸入
read_inputs();
// 更新當(dāng)前位置
currentPos = read_position_sensor();
// 判斷目標(biāo)位置
if (currentPos != POS1 && currentPos != POS2) {
// 計(jì)算目標(biāo)位置
targetPos = decide_target_position(currentPos);
// 發(fā)送目標(biāo)位置到伺服驅(qū)動(dòng)器
send_position_to_servo_driver(targetPos);
// 監(jiān)控運(yùn)動(dòng)狀態(tài)
monitor_motion_status();
}
// 異常處理
check_for_errors();
// 延時(shí)等待下一個(gè)循環(huán)
wait_for_next_cycle();
}
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
PLC控制
+關(guān)注
關(guān)注
9文章
254瀏覽量
27862 -
編程
+關(guān)注
關(guān)注
88文章
3685瀏覽量
94923 -
機(jī)械手
+關(guān)注
關(guān)注
7文章
344瀏覽量
30235 -
伺服驅(qū)動(dòng)器
+關(guān)注
關(guān)注
22文章
515瀏覽量
32426
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
PLC控制伺服電機(jī)接線教程
PLC與伺服驅(qū)動(dòng)器的編程接線方法。伺服控制系統(tǒng)的使用方法其實(shí)跟變頻
發(fā)表于 10-21 09:14
?4267次閱讀
西門子Smart的PLC項(xiàng)目_PLC雙脈沖模式控制伺服驅(qū)動(dòng)器正反轉(zhuǎn)
西門子Smart的PLC雙脈沖模式控制伺服驅(qū)動(dòng)器正反轉(zhuǎn)
發(fā)表于 12-11 17:22
?32次下載
三菱PLC(可編程邏輯控制器)編程實(shí)例項(xiàng)目例程-伺服控制貼標(biāo)機(jī)
三菱PLC(可編程邏輯控制器)編程實(shí)例項(xiàng)目例程-伺服控制
發(fā)表于 03-22 16:36
?204次下載
三菱PLC編程實(shí)例項(xiàng)目例程-伺服電機(jī)控制
三菱PLC(可編程邏輯控制器)編程實(shí)例項(xiàng)目例程-伺服電機(jī)控制
發(fā)表于 03-22 16:53
?41次下載
伺服驅(qū)動(dòng)器怎樣維修_伺服驅(qū)動(dòng)器維修技巧
本文首先介紹了伺服驅(qū)動(dòng)器的特點(diǎn),其次介紹了伺服驅(qū)動(dòng)器控制
發(fā)表于 05-07 11:12
?2.1w次閱讀

伺服驅(qū)動(dòng)器如何接線_伺服驅(qū)動(dòng)器接線圖
本文首先介紹了禾川伺服驅(qū)動(dòng)接線圖解,另外還介紹了伺服驅(qū)動(dòng)器與
發(fā)表于 05-07 14:41
?11.6w次閱讀

臺(tái)達(dá)ASDA系列伺服驅(qū)動(dòng)器PLC的控制實(shí)例參數(shù)設(shè)置及PLC程序免費(fèi)下載
臺(tái)達(dá)ASDA系列伺服驅(qū)動(dòng)器PLC的控制實(shí)例參數(shù)設(shè)置及PLC程序免費(fèi)下載。
發(fā)表于 12-15 08:00
?28次下載
PLC與伺服驅(qū)動(dòng)器、負(fù)載的關(guān)系
已知伺服驅(qū)動(dòng)器Pm=10000Pulse/r,PLC控制器發(fā)出的頻率f (puls/s),如何計(jì)算負(fù)載軸的轉(zhuǎn)速n(r/s),
伺服驅(qū)動(dòng)器A、B、C相脈沖輸出有什么作用?怎么與plc連接?
伺服驅(qū)動(dòng)器A、B、C相脈沖輸出的作用及與PLC的連接方式 伺服驅(qū)動(dòng)器是一種常用的電氣設(shè)備,用于控制
PLC怎么控制伺服驅(qū)動(dòng)器
在現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域,PLC(可編程邏輯控制器)與伺服驅(qū)動(dòng)器的結(jié)合應(yīng)用已經(jīng)成為提高生產(chǎn)效率、保證產(chǎn)品質(zhì)量的重要手段。
上位機(jī)控制伺服驅(qū)動(dòng)器的作用是什么
上位機(jī)控制伺服驅(qū)動(dòng)器的作用是實(shí)現(xiàn)對(duì)伺服驅(qū)動(dòng)器的精確控制,以滿足各種工業(yè)自動(dòng)化應(yīng)用的需求。本文將詳
PLC控制伺服驅(qū)動(dòng)器的主要方式
在工業(yè)自動(dòng)化領(lǐng)域中,伺服驅(qū)動(dòng)器作為控制伺服電機(jī)運(yùn)行的關(guān)鍵設(shè)備,其性能的穩(wěn)定性和控制精度對(duì)于整個(gè)生產(chǎn)線的運(yùn)行效率具有重要影響。而
三菱PLC與伺服驅(qū)動(dòng)器之間的通信方法
在工業(yè)自動(dòng)化領(lǐng)域中,三菱PLC(可編程邏輯控制器)與伺服驅(qū)動(dòng)器之間的通信是實(shí)現(xiàn)高效、精確控制的重
伺服驅(qū)動(dòng)器和伺服電機(jī)介紹
在工業(yè)自動(dòng)化和精密控制領(lǐng)域,伺服系統(tǒng)扮演著至關(guān)重要的角色。與傳統(tǒng)的變頻技術(shù)相比,伺服系統(tǒng)具備更精確的控制能力和更高的性能水平。 一、驅(qū)動(dòng)器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論