") Kuka機器人配置Profinet通訊網(wǎng)關HT3S-PNS-ECS
Kuka機器人配置Profinet通訊網(wǎng)關HT3S-PNS-ECS

選擇導入設備說明文件,然后點擊搜索,找到網(wǎng)關的gsd文件導入進去,如下圖

導入完畢后,點擊繼續(xù)
顯示成功后點擊完成
- 查找設備,

查找設備搜索,導入程序
在設備里找到安全控制系統(tǒng),雙擊,激活在線設備
在總線結構Profinet中添加網(wǎng)關的GSD文件,右擊打開選中添加進去,如圖
- 對添加進去網(wǎng)關進行通訊,雙擊進入界面,在網(wǎng)絡界面進行修改
(ip默認為192.168.1.1,名稱hi-top,可以通過博圖在線訪問進行查看)
雙擊
- 進行模塊的添加,點擊模塊,如下圖:

添加完成后,顯示如下圖
- 通過點擊左側項目樹-PROFINET-打開的設備設定中,進行修改名稱和ip地址,修改后應用-確定
注:修改的名稱與ip地址要與第4步驟中一致
- 進行io映射
在界面找到“輸入輸出接線”一側為機器人,一側為網(wǎng)關進行連接
- 映射完成下載,即配置完成。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29568瀏覽量
211952 -
網(wǎng)關
+關注
關注
9文章
5464瀏覽量
52623 -
通訊
+關注
關注
9文章
927瀏覽量
35550 -
Profinet
+關注
關注
6文章
1618瀏覽量
25065
發(fā)布評論請先 登錄
相關推薦
熱點推薦
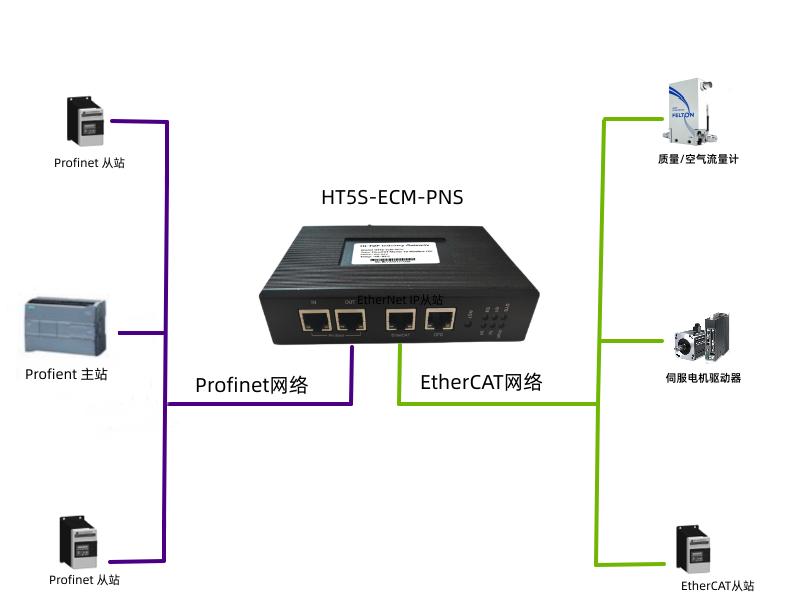
EtherCAT主站網(wǎng)關HT5S-ECM-PNS接半導體用空氣流量計與西門子 PLC通訊測試
HT5S-ECM-PNS是一款EtherCAT主站功能的通訊網(wǎng)關,主要功能是將多個EtherCAT的從站設備(伺服、閥門、儀表、變頻器、流量計等)接入到Profinet網(wǎng)絡,進行
Modbus RTU轉PROFINET協(xié)議轉換網(wǎng)關 HT1S-PNS485-S10
。HT3S-PNS-MDN為最大可支持31個MODBUS從站,輸入≤1400 字節(jié),輸出≤1400 字節(jié),輸入+輸出≤2800 字節(jié)。本網(wǎng)關實現(xiàn)Modbus RTU/RS485/232轉PROFINET功能
發(fā)表于 06-06 14:43
Profinet轉Modbus TCP網(wǎng)關連接搬運機器人配置案例
本案例是西門子1200PLC通過Profinet轉Modbus TCP網(wǎng)關連接搬運機器人配置案例,所需設備為西門子1200PLC,耐用通信技術Pro
發(fā)表于 06-07 11:16
profinet轉ethernet網(wǎng)關連接發(fā)那科機器人配置案例
本案例是西門子1200PLC通過PROFINET轉EtherNet網(wǎng)關連接發(fā)那科搬運機器人配置案例。所需設備:西門子1200PLC、Profinet
發(fā)表于 08-03 17:58
沒有有前輩用LabVIEW控制kuka機器人c2的經(jīng)驗?通訊是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
發(fā)表于 10-21 20:59
EPR6-S工業(yè)機器人通過EtherCAT轉profinet網(wǎng)關接入西門子系統(tǒng)
即可。
以上是EPR6-S工業(yè)機器人專用六軸伺服驅動器通過EtherCAT轉profinet(Profinet轉EtherCAT)網(wǎng)關實
發(fā)表于 10-24 14:04
KUKA工業(yè)機器人與S7-1200PLC實現(xiàn)Profinet通訊的步驟
本次內容來簡單談一談KUKA工業(yè)機器人與S7-1200PLC實現(xiàn)Profinet通訊的步驟。

EPR6-S工業(yè)機器人通過EtherCAT轉profinet網(wǎng)關接入西門子系統(tǒng)
EPR6-S工業(yè)機器人專用六軸伺服驅動器通過EtherCAT轉profinet網(wǎng)關與西門子PLC1200連接
本案例EtherCAT轉profin

汽車生產線中的工業(yè)機器人應用HT3S-PNS-ECS(EtherCAT/Profinet)協(xié)議轉換通訊方案案例分析
隨著工業(yè)自動化的快速發(fā)展,汽車生產線對工業(yè)機器人的依賴日益增加。HT3S-PNS-ECS作為工業(yè)機器人中的關鍵組件,其EtherCAT/Profinet協(xié)議轉換
開疆智能Profient轉DeviceNET主網(wǎng)關連接發(fā)那科機器人配置案例
此案例是由于客戶在某車廠項目中,需要將甲方的發(fā)那科機器人介入到自己的Profinet網(wǎng)絡系統(tǒng)中,由于機器人采用DeviceNET協(xié)議,故選擇開疆智能研發(fā)的Profient轉DeviceNET網(wǎng)
庫卡機器人EtherCAT通過HT3S-ECS-MTP接入MOD
:HT3S-ECS-MTP 2. KR10-R1100 機器人 3. PC + Modbus Poll 測試插件 4. GW Modbus Builder + TCPConfig8 配置
發(fā)表于 04-14 14:48
?0次下載
開疆智能Canopen轉Profinet網(wǎng)關連接工博士GBS20機器人配置案例
本案例是介紹將支持canopen通信協(xié)議的機器人機器人接入到西門子Profinet網(wǎng)絡中,由于兩種協(xié)議不能直接通訊,故選擇了canopen轉Profinet





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論