") 數(shù)控機(jī)床伺服系統(tǒng)由什么組成的
數(shù)控機(jī)床伺服系統(tǒng)由什么組成的
數(shù)控機(jī)床伺服系統(tǒng)是數(shù)控機(jī)床的重要組成部分,它負(fù)責(zé)將數(shù)控系統(tǒng)的指令轉(zhuǎn)換為機(jī)床各軸的實(shí)際運(yùn)動,從而實(shí)現(xiàn)對機(jī)床的精確控制。本文將詳細(xì)介紹數(shù)控機(jī)床伺服系統(tǒng)的組成、工作原理以及常見故障診斷和排除方法。
一、數(shù)控機(jī)床伺服系統(tǒng)的組成
伺服電機(jī)是伺服系統(tǒng)的核心部件,它將電能轉(zhuǎn)換為機(jī)械能,驅(qū)動機(jī)床各軸的運(yùn)動。伺服電機(jī)的類型主要有直流伺服電機(jī)和交流伺服電機(jī)兩種。
直流伺服電機(jī)具有控制精度高、響應(yīng)速度快、調(diào)速范圍寬等優(yōu)點(diǎn),但存在電刷磨損、維護(hù)成本高等缺點(diǎn)。交流伺服電機(jī)則具有結(jié)構(gòu)簡單、可靠性高、維護(hù)成本低等優(yōu)點(diǎn),但控制精度和響應(yīng)速度相對較低。
驅(qū)動器是伺服系統(tǒng)中的功率放大器,它將數(shù)控系統(tǒng)的指令信號轉(zhuǎn)換為伺服電機(jī)所需的電壓和電流信號。驅(qū)動器的類型主要有模擬驅(qū)動器和數(shù)字驅(qū)動器兩種。
模擬驅(qū)動器采用模擬電路進(jìn)行信號放大和處理,具有成本較低、調(diào)試簡單等優(yōu)點(diǎn),但存在控制精度較低、抗干擾能力較弱等缺點(diǎn)。數(shù)字驅(qū)動器采用數(shù)字電路進(jìn)行信號處理,具有控制精度高、抗干擾能力強(qiáng)等優(yōu)點(diǎn),但成本相對較高。
編碼器是伺服系統(tǒng)中的位置檢測元件,它將機(jī)床各軸的實(shí)際位置轉(zhuǎn)換為電信號,反饋給數(shù)控系統(tǒng)進(jìn)行比較和調(diào)整。編碼器的類型主要有增量式編碼器和絕對式編碼器兩種。
增量式編碼器只能檢測位置的變化量,需要在每次開機(jī)時(shí)進(jìn)行零點(diǎn)校準(zhǔn)。絕對式編碼器可以檢測到機(jī)床的絕對位置,無需零點(diǎn)校準(zhǔn),但成本相對較高。
控制器是伺服系統(tǒng)的大腦,它接收數(shù)控系統(tǒng)的指令信號,根據(jù)編碼器的反饋信號進(jìn)行比較和調(diào)整,最終輸出控制信號給驅(qū)動器。控制器的類型主要有模擬控制器和數(shù)字控制器兩種。
模擬控制器采用模擬電路進(jìn)行信號處理,具有成本較低、調(diào)試簡單等優(yōu)點(diǎn),但存在控制精度較低、抗干擾能力較弱等缺點(diǎn)。數(shù)字控制器采用數(shù)字電路進(jìn)行信號處理,具有控制精度高、抗干擾能力強(qiáng)等優(yōu)點(diǎn),但成本相對較高。
- 機(jī)械傳動機(jī)構(gòu)
機(jī)械傳動機(jī)構(gòu)是伺服系統(tǒng)與機(jī)床之間的連接部件,它將伺服電機(jī)的旋轉(zhuǎn)運(yùn)動轉(zhuǎn)換為機(jī)床各軸的直線運(yùn)動。機(jī)械傳動機(jī)構(gòu)的類型主要有齒輪傳動、皮帶傳動、絲杠傳動等。
齒輪傳動具有傳動比準(zhǔn)確、結(jié)構(gòu)緊湊等優(yōu)點(diǎn),但存在噪音較大、磨損較快等缺點(diǎn)。皮帶傳動具有噪音較低、維護(hù)簡單等優(yōu)點(diǎn),但傳動比容易發(fā)生變化。絲杠傳動具有傳動比穩(wěn)定、精度較高等優(yōu)點(diǎn),但成本相對較高。
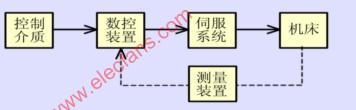
二、數(shù)控機(jī)床伺服系統(tǒng)的工作原理
- 數(shù)控系統(tǒng)發(fā)出指令信號
數(shù)控系統(tǒng)根據(jù)加工程序,計(jì)算出機(jī)床各軸的目標(biāo)位置和速度,生成指令信號。
- 控制器接收指令信號
控制器接收數(shù)控系統(tǒng)的指令信號,根據(jù)編碼器的反饋信號進(jìn)行比較和調(diào)整,生成控制信號。
- 驅(qū)動器放大控制信號
驅(qū)動器接收控制器的控制信號,將其放大為伺服電機(jī)所需的電壓和電流信號。
- 伺服電機(jī)驅(qū)動機(jī)床運(yùn)動
伺服電機(jī)接收驅(qū)動器的電壓和電流信號,產(chǎn)生相應(yīng)的力矩和轉(zhuǎn)速,驅(qū)動機(jī)床各軸的運(yùn)動。
- 編碼器反饋實(shí)際位置
編碼器檢測機(jī)床各軸的實(shí)際位置,將其轉(zhuǎn)換為電信號,反饋給控制器。
- 控制器進(jìn)行閉環(huán)控制
控制器根據(jù)編碼器的反饋信號,與數(shù)控系統(tǒng)的指令信號進(jìn)行比較,調(diào)整控制信號,實(shí)現(xiàn)閉環(huán)控制。
三、數(shù)控機(jī)床伺服系統(tǒng)常見故障診斷和排除方法
- 伺服電機(jī)故障
故障現(xiàn)象:機(jī)床運(yùn)動異常,如速度不穩(wěn)定、位置偏差等。
排除方法:檢查伺服電機(jī)的電源、線路、軸承等部件,必要時(shí)更換伺服電機(jī)。
- 驅(qū)動器故障
故障現(xiàn)象:伺服電機(jī)無法啟動或運(yùn)行不穩(wěn)定。
排除方法:檢查驅(qū)動器的電源、線路、參數(shù)設(shè)置等,必要時(shí)更換驅(qū)動器。
- 編碼器故障
故障現(xiàn)象:機(jī)床位置偏差、回零失敗等。
排除方法:檢查編碼器的安裝、線路、參數(shù)設(shè)置等,必要時(shí)更換編碼器。
- 控制器故障
故障現(xiàn)象:機(jī)床無法接收指令信號或運(yùn)動異常。
排除方法:檢查控制器的電源、線路、參數(shù)設(shè)置等,必要時(shí)更換控制器。
- 機(jī)械傳動機(jī)構(gòu)故障
故障現(xiàn)象:機(jī)床運(yùn)動卡滯、噪音異常等。
排除方法:檢查機(jī)械傳動機(jī)構(gòu)的安裝、潤滑、磨損等,必要時(shí)更換傳動部件。
-
機(jī)械
+關(guān)注
關(guān)注
8文章
1672瀏覽量
41496 -
數(shù)控機(jī)床
+關(guān)注
關(guān)注
19文章
817瀏覽量
47782 -
數(shù)控系統(tǒng)
+關(guān)注
關(guān)注
5文章
263瀏覽量
24812 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
584瀏覽量
39955
發(fā)布評論請先 登錄
PSO算法在數(shù)控機(jī)床交流伺服系統(tǒng)PID參數(shù)優(yōu)化中的應(yīng)用
數(shù)控機(jī)床伺服電機(jī)控制的性能有哪些呢
數(shù)控機(jī)床的伺服系統(tǒng)
數(shù)控機(jī)床的伺服系統(tǒng)
數(shù)控機(jī)床習(xí)題
數(shù)控機(jī)床的伺服驅(qū)動系統(tǒng)
PSO算法在數(shù)控機(jī)床交流伺服系統(tǒng)PID參數(shù)優(yōu)化中的應(yīng)用
數(shù)控機(jī)床的組成和分類
數(shù)控機(jī)床的組成
數(shù)控機(jī)床的基本組成、組成部分
數(shù)控機(jī)床伺服驅(qū)動系統(tǒng)的基本組成






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論