 康謀分享 | 從CAN到CAN FD:ADTF在汽車網絡中的應用
康謀分享 | 從CAN到CAN FD:ADTF在汽車網絡中的應用
?隨著汽車電子技術的發展,車輛上配備了越來越多的電子裝置,這些設備多采用點對點的方式通信,這也導致了車內存在龐大的線束。造成汽車制造和安裝的困難并進一步降低汽車的配置空間,汽車總線逐步開始向網絡化方向發展。
在此背景下,CAN(Controller Area Network)總線應運而生,以其高可靠性和靈活性,成為汽車通信系統中不可或缺的一部分,承載著車輛控制、監控和診斷等關鍵任務。
一、技術演進:從CAN到CAN FD
隨著技術的持續發展,傳統的CAN總線在數據傳輸速率和帶寬上逐漸顯現出局限性。具體來說,傳統的CAN總線波特率最大為1Mbit/s,數據幀中有效數據域最大為8個字節。
這種設計在早期滿足了車輛控制和監控的需求,但隨著車載系統復雜度的提升,對更高數據傳輸速率和更大數據容量的需求日益迫切。
因此,CAN FD(CAN with Flexible Data-Rate)隨之推出。CAN FD在保持CAN優良特性的基礎上,實現了技術上的重大突破:
1、可變數據位速率
CAN FD引入了數據段的波特率可變機制,其傳輸速率一般5-8Mbit/s,這一段的波特率可變,而其余部分仍使用原來的CAN速率,從而在保持兼容性的同時大幅提升了數據傳輸速率。
2、擴大的有效數據域
CAN FD將數據幀中有效數據域擴展到64個字節,相比傳統CAN的8個字節,顯著提高了單幀數據的傳輸量,使得通信更加靈活、快速、可靠。
3、新的CRC算法
為了適應更大的數據域和提高錯誤檢測的準確性,CAN FD采用了新的CRC算法,并對填充位規則進行了優化,以減少錯幀漏檢率。
4、新的幀結構
CAN FD在控制場中增加了FDF位、BRS位和ESI位,這些位用于區分CAN報文與CAN FD報文,并確定是否轉換為可變速率。同時,DLC編碼方式也由線性變為階梯式,以適應更大的數據長度。
二、ADTF:支持全面的CAN通信協議
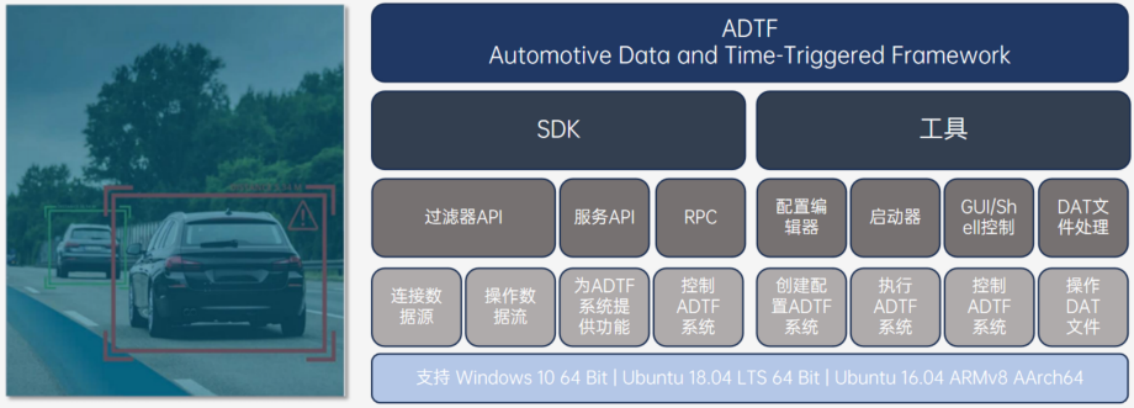
ADTF(AUTOMOTIVE DATA & TIME-TRIGGERED FRAMEWORK)是一款汽車數據與時間觸發框架,可用于開發車輛駕駛輔助系統。提供一系列功能和工具來支持車輛自動化和駕駛輔助系統的開發和測試。ADTF能用于快速原型設計、仿真、數據記錄和驗證(后處理)。
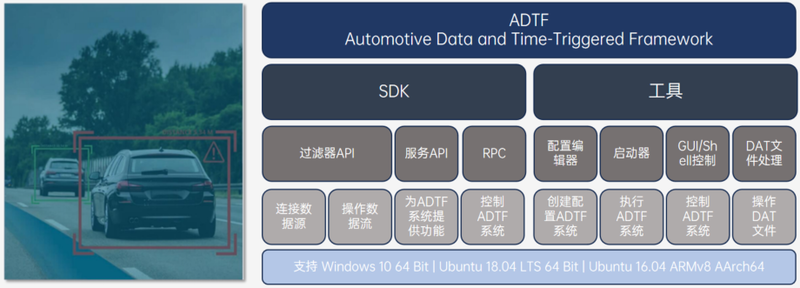 圖1:ADTF框架
圖1:ADTF框架在總線方面,ADTF具備多個工具箱以支持其仿真與測試,比如ADTF Device Toolbox,ADTF Calibration Toolbox等。
在ADTF Device Toolbox中提供ARXML數據庫文件總線解析,支持汽車總線(CAN 、CANFD 、 Flexray 、 以太網)、Vector?設備、信號處理和可視化等。
在ADTF Calibration Toolbox中支持通過多個過濾器與 ECU 進行 XCP 通信,以便通過 CAN 、 FlexRay 或以太網進行通信。
結合上述工具箱,ADTF可以在應用在以下領域:
1、汽車電子系統開發
ADTF廣泛應用于汽車電子控制單元(ECU)的開發,包括發動機控制、底盤控制、車身電子等。
2、仿真和測試
在汽車電子系統的仿真和測試中,ADTF能夠模擬總線通信,進行系統級和組件級的測試。
3、數據記錄和分析
ADTF支持數據記錄功能,可以捕獲和存儲總線上的數據,便于后續分析和故障診斷。
三、應用實踐:ADTF的技術實現
ADTF的一個強項就是對總線數據的解析。比如對CAN FD采集的數據,基于DBC配置進行解析和可視化呈現,如圖2和3所示。
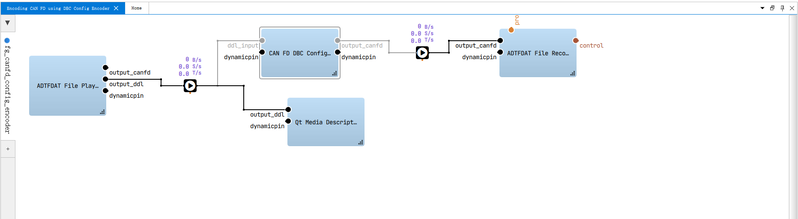 圖2:CAN FD數據回放工程圖
圖2:CAN FD數據回放工程圖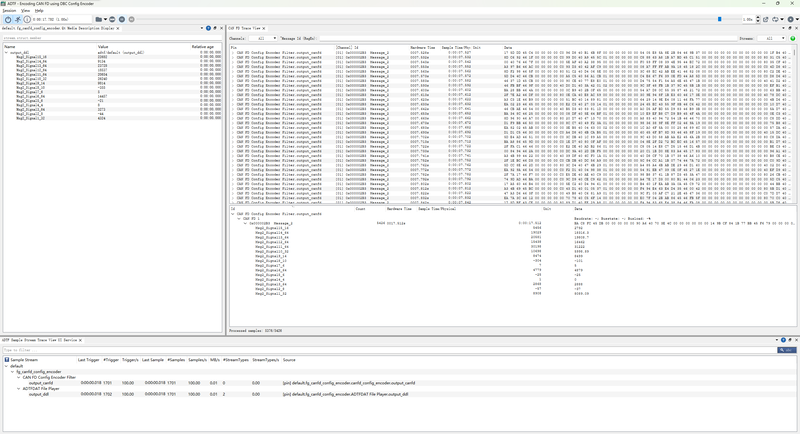 圖3:CAN FD數據解析效果展示
圖3:CAN FD數據解析效果展示此外,ADTF支持AUTOSAR架構下ARXML CANFD數據的解析。如圖4和圖5所示的ARXML CANFD數據解析工程。
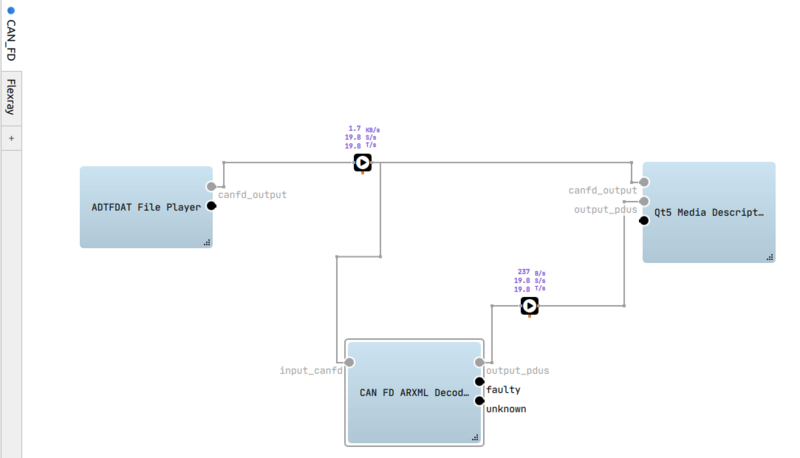 圖4:ARMXL CANFD數據回放工程圖
圖4:ARMXL CANFD數據回放工程圖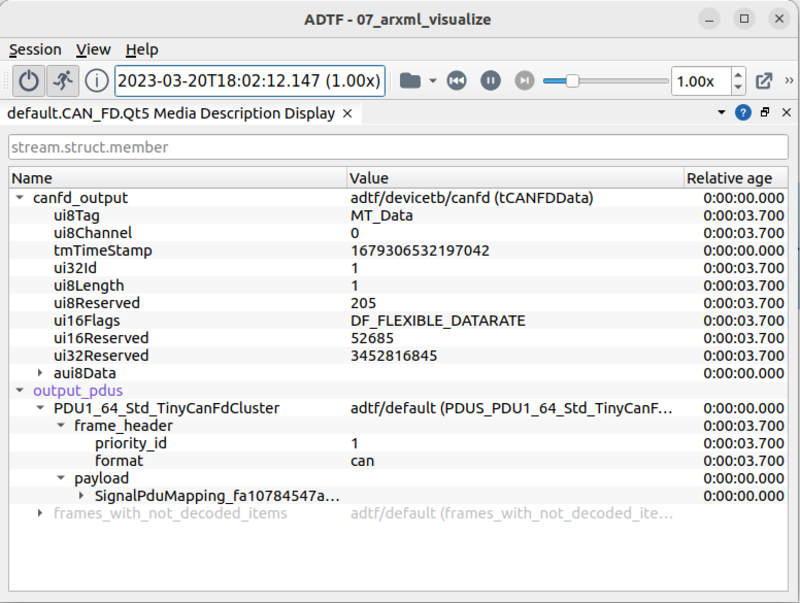 圖5:ARMXL CANFD數據解析效果展示
圖5:ARMXL CANFD數據解析效果展示ADTF軟件以其強大的功能、高度的靈活性和專業的技術支持,成為汽車電子開發領域的重要工具。無論是在產品開發、系統集成還是測試驗證階段,ADTF都能提供有效的解決方案,加速汽車電子系統的開發進程。
作者介紹
鄭工
康謀科技高級自動駕駛技術研發工程師,擁有超過5年的汽車電子和自動駕駛數據分析經驗專精于高精度傳感器數據的獲取、整合與優化。數據采集技術方面造詣深厚,尤其在車載網絡和實時數采系統上富有實踐成果,設計并優化了多種數據采集與傳輸方案。曾多次代表公司參加海外技術研討會和培訓項目,深入了解國際自動駕駛行業的最新動態和技術趨勢,積累了豐富的國際視野。
-
CAN
+關注
關注
57文章
2821瀏覽量
466019 -
汽車網絡
+關注
關注
0文章
66瀏覽量
15010 -
自動駕駛
+關注
關注
788文章
14091瀏覽量
168518 -
CAN FD
+關注
關注
0文章
81瀏覽量
13003
發布評論請先 登錄
相關推薦
如何從傳統的CAN用法中設置CAN-FD?

康謀與C2A Security戰略合作,共拓亞太汽車網絡安全市場
虹科干貨 三代CAN技術演進:從CAN CC到CAN XL的創新路徑(上篇)
三代CAN技術演進:從CAN CC到CAN XL的創新路徑(下篇)

【CAN總線知識】深度解析CAN-FD與CAN協議的差別

CAN系列協議和以太網協議在汽車電子中的應用
CAN FD與傳統CAN的區別是什么

CAN-FD:CAN總線網絡第二章

從替代到創新,國產CAN FD芯片持續突破
CAN/CAN FD/CAN XL三大總線協議解讀,是逐步替代關系嗎?
康謀分享 | ADTF在CAN方面技術的深入探討

康謀分享:從CAN到CAN FD:ADTF在汽車網絡中的應用





 工商網監
工商網監
評論