 什么是步進電機?步進電機的類型和結構
什么是步進電機?步進電機的類型和結構
一、什么是步進電機?
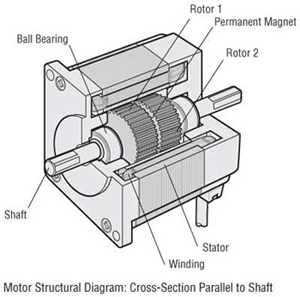
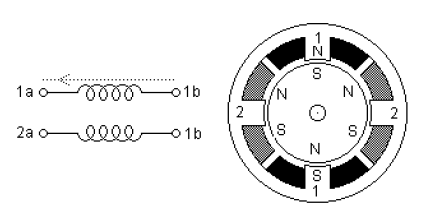
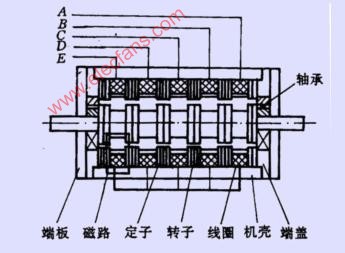
與所有電機一樣,步進電機也有定子和轉子,但與普通直流電機不同的是,定子由單獨的線圈組組成。線圈的數量會根據步進電機的類型而有所不同,但現在只需了解,在步進電機中,轉子由金屬極組成,每個極將被定子中的一組線圈吸引。下圖顯示了具有 8 個定子極和 6 個轉子極的步進電機。
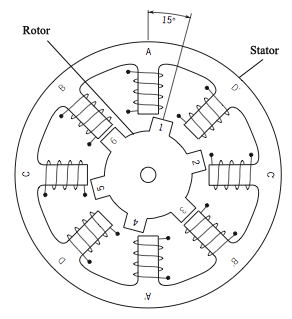
如果你看一下定子上的線圈,它們是按線圈對排列的,比如 A 和 A' 形成一對,B 和 B' 形成一對,依此類推。因此,每個線圈對都形成一個電磁體,并且可以使用驅動電路單獨為它們通電。當線圈通電時,它充當磁鐵,轉子磁極與其對齊,當轉子旋轉以調整自身以與定子對齊時,稱為一步。類似地,通過按順序給線圈通電,我們可以小步旋轉電機以完成完整的旋轉。
二、步進電機的類型
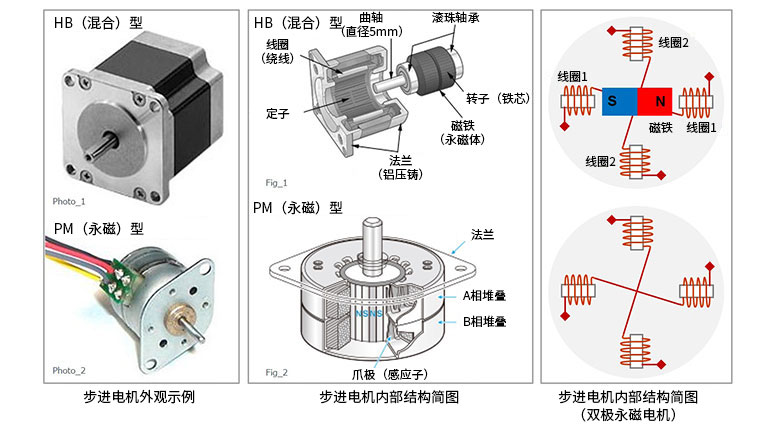
步進電機是一種將電能轉化為機械能的機電裝置。同時,步進電機是一種無刷同步電機,可以將完整的旋轉分成大量的步數。當步進電機以正確的順序施加電命令脈沖時,步進電機的軸或心軸以不連續的步長旋轉,只要電機的尺寸適合應用,就可以在沒有任何反饋機制的情況下精確控制電機的位置。如果沒有給定電源,它可以保持當前位置,步進電機分為單極和雙極。
1、單極步進電機
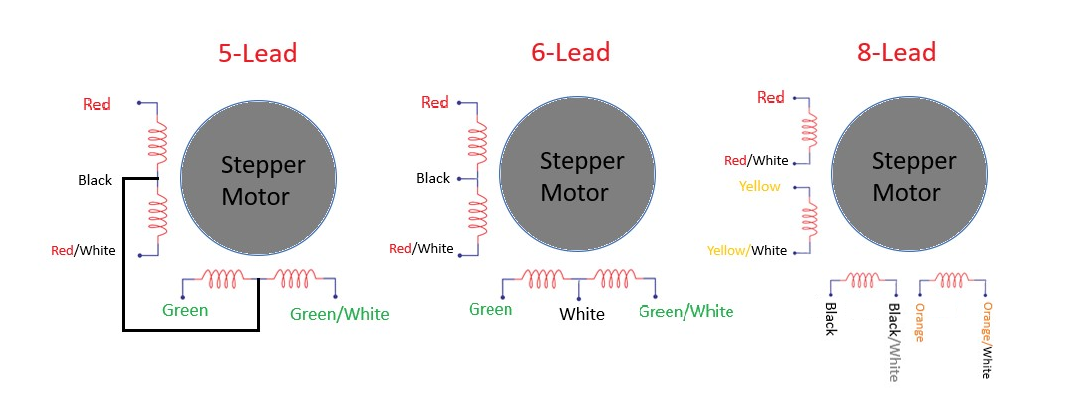
單極步進電機每相都有一個帶有中心抽頭的繞組。每個繞組部分針對每個方向的磁場而接通。通常,給定一個相,每個繞組的中心抽頭都是共用的:每相三個引線,典型的兩相電機有六個引線。通常,這些兩相公共端是內部連接的,因此電機只有五根引線。因此,它具有 5、6 和 8 根引線,并通過每相輸入的中心抽頭運行一個繞組。此圖顯示了不同類型的單極步進電機及其引線配置,請參閱步進電機的數據表以了解更多信息。
2、雙極步進電機
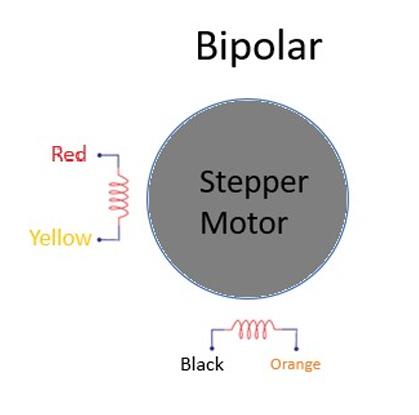
雙極電機每相有一對單繞組連接。為了反轉磁極,需要反轉繞組中的電流,因此驅動電路必須更加復雜,通常采用 H 橋布置(但是有幾種現成的驅動器芯片可使其成為簡單的事情)。每相有兩條引線,不常見。它每相一個繞組,僅用4根引線連接兩組內部電磁鐵線圈,通過改變流經電機線圈的電流方向即可實現正轉和反轉。這可能比單極更復雜,但 H 橋和步進電機驅動電路使其變得非常簡單。
三、步進電機的驅動電路結構
步進電機的驅動電路結構一般可以分為雙極性電機和單極性電機:單極性電機通過繞組的交替導通實現磁通方向的改變,雙極性電機通過H橋的控制實現電流方向的改變,從而實現磁通方向的改變。單極性電機只需要4顆功率MOS,對電流進行單極控制(從MOS管角度),但是電機繞線上需要多一個抽頭;雙極性電機在結構上更簡單,兩個繞組利用率高,但是需要增加到8顆功率MOS進行驅動,控制器的成本會上升。
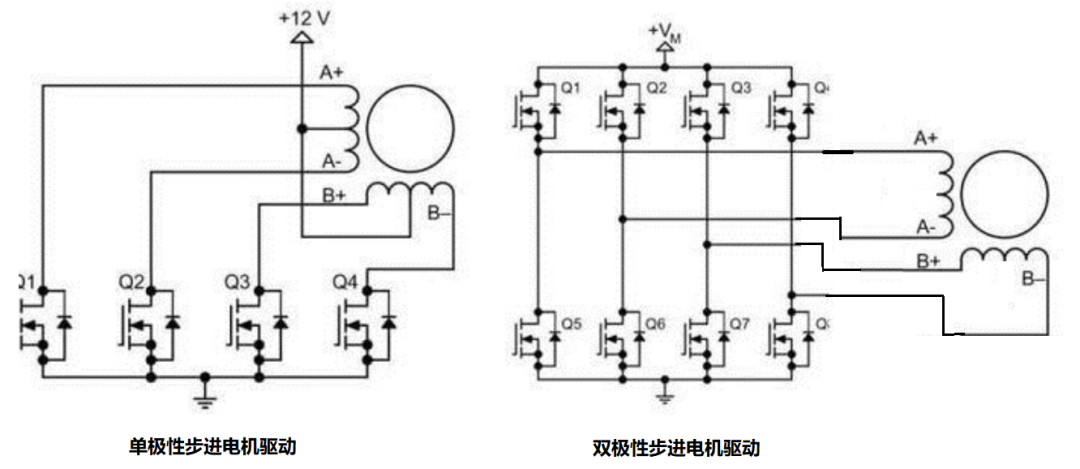
圖 單極性和雙極性步進電機驅動
步進電機除了在電機結構上進行細分,還可以通過控制電流的波形來控制步進電機的細分精度。細分的原理是在最小的步距角之間插入模擬出來的正弦波電流,以對步距角進行細分,該細分方式也稱為電流細分。
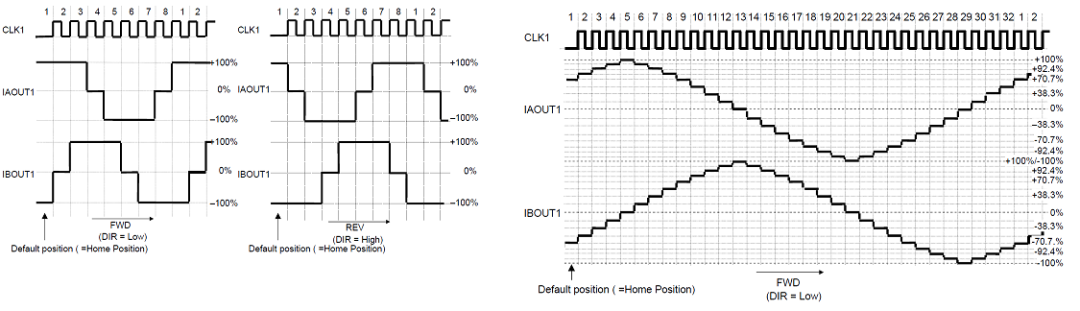
圖 步進電機驅動電流的細分
四、驅動步進電機的方法
由于結構復雜,步進電機需要特殊的電路來驅動它們。驅動步進電機的方法有很多種。在本教程中,我們將了解驅動電機的最常見方法。為了便于解釋,我們將考慮四相步進電機。
單勵磁模式:

這是驅動步進電機最基本的方式,雖然使用不多,但仍然值得了解以了解步進電機的驅動。在這種方法中,彼此相鄰的每個相或定子將使用特殊電路交替地被一一激活。這會使定子磁化和消磁,導致轉子一次移動一步。
全步驅動:
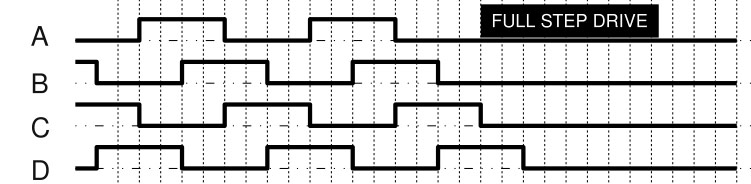
在該方法中,不是一次激活一個定子,而是在兩個定子之間間隔很短的時間間隔來激活兩個定子。在此模式下,任何兩個定子都將處于活動狀態。這意味著第一定子開啟,第二定子將在短時間間隔后開啟,而第一定子仍然開啟。這種方法會產生高扭矩,并使電機能夠驅動高負載。
五、步進電機的控制模式
步進電機的控制模式是實現其精確、高效運行的關鍵。下面將詳細闡述步進電機的幾種主要控制模式,并結合相關數字和信息進行說明。
1、開環控制
開環控制是步進電機最常見的控制方式之一。它通過控制輸入信號的頻率、脈沖數和電壓等參數來控制步進電機的旋轉角度和方向。這種控制方式適用于一些對定位精度要求不高的低端應用場景,如打印機、掃描儀、復印機等。開環控制的優點是簡單易行,成本較低。然而,由于它無法檢測電機的實際位置和速度,因此存在定位精度不高、抗干擾性差、電流波動大等缺點。
2、閉環控制
為了解決開環控制存在的問題,人們研究出了閉環控制方式。閉環控制是通過在步進電機旋轉過程中檢測位置和速度信號,并通過反饋控制來控制步進電機的旋轉角度和位置。閉環控制具有定位精度高、抗干擾性強、穩定性好等優點,適用于一些高端應用場景,如機床、醫療設備、精密儀器等。在閉環控制中,常用的反饋信號包括編碼器信號、霍爾傳感器信號等。
3、基本控制模式
全步進模式
全步進模式是最簡單的控制模式,即每發送一個脈沖,步進電機就轉動一個完整的步進角度。這種模式下,步進電機的轉動精度和轉速都比較低,適用于一些只需要較簡單控制的場景。全步進模式的步距角一般為1.8度(在不設置步進電機驅動器細分的情況下),即每輸入一個脈沖,步進電機轉動1.8度。
半步進模式
半步進模式在全步進模式的基礎上,將每個步進角度分成兩半,即每個脈沖只轉動一半的步進角度。相比全步進模式,半步進模式的轉動精度和轉速都有顯著提高。在半步進模式下,步距角為0.9度(當驅動器細分為2時),即每輸入一個脈沖,步進電機轉動0.9度。
微步進模式
微步進模式是在半步進模式的基礎上進行改進的。它通過調整每個步進角度的大小和方向,使得步進電機的轉動更加平滑和精確。微步進模式適用于一些對步進電機的轉動精度和平滑性要求較高的場景。在微步進模式下,步距角可以進一步細分,如0.1度或更小,從而實現更高的轉動精度。
變頻控制模式
變頻控制模式是通過調整步進電機驅動電機的頻率和電壓來達到對轉動角度和速度的控制。這種控制方式可以使步進電機的轉速更加穩定和精確,適用于一些對步進電機轉速要求較高的應用場景。變頻控制模式可以通過改變脈沖頻率來實現對步進電機轉速的調節。
4、驅動模式
步進電機控制器主要有三種驅動模式:細分驅動模式、整步驅動模式和半步驅動模式。細分驅動模式具有低速振動極小和定位精度高的優點;整步驅動模式每個脈沖將使電機移動一個基本步距角;而半步驅動模式則具有精度高一倍和低速運行時振動較小的優點。
綜上所述,步進電機的控制模式多種多樣,每種模式都有其特點和適用場景。在實際應用中,需要根據具體的應用需求來選擇合適的控制模式和驅動模式。
-
線圈
+關注
關注
14文章
1842瀏覽量
45067 -
步進電機
+關注
關注
152文章
3143瀏覽量
148670 -
驅動電路
+關注
關注
155文章
1561瀏覽量
109302
發布評論請先 登錄
相關推薦
雙極性步進電機的基本結構
什么是步進電機 步進電機基本結構和工作原理


步進電機的結構及基本工作原理






 工商網監
工商網監
評論