") 工業(yè)控制中常用的pid控制器是什么
工業(yè)控制中常用的pid控制器是什么
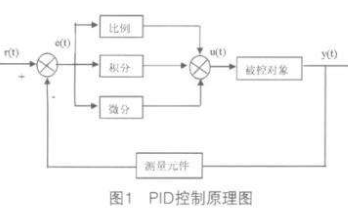
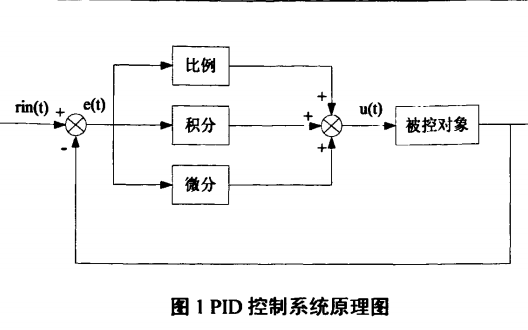
PID控制器是一種廣泛應(yīng)用于工業(yè)控制領(lǐng)域的控制器,其全稱為比例-積分-微分控制器(Proportional-Integral-Derivative Controller)。它是一種線性控制器,通過(guò)比例(P)、積分(I)和微分(D)三個(gè)參數(shù)的調(diào)節(jié),實(shí)現(xiàn)對(duì)系統(tǒng)輸出的精確控制。
一、PID控制器的基本原理
- 比例控制(P控制)
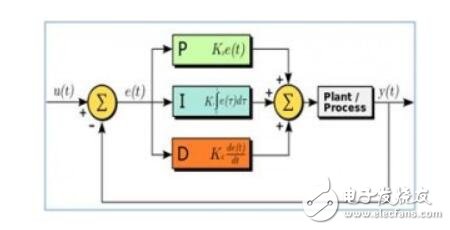
比例控制是PID控制器中最基本的控制方式。其核心思想是通過(guò)比較系統(tǒng)的輸出值與期望值之間的偏差,然后根據(jù)偏差的大小來(lái)調(diào)整控制量。比例控制的公式為:
u(t) = Kp * e(t)
其中,u(t)表示控制量,Kp表示比例系數(shù),e(t)表示偏差。
比例控制的優(yōu)點(diǎn)是響應(yīng)速度快,但缺點(diǎn)是存在穩(wěn)態(tài)誤差,即當(dāng)系統(tǒng)達(dá)到穩(wěn)態(tài)時(shí),輸出值與期望值之間仍然存在一定的偏差。
- 積分控制(I控制)
積分控制是為了消除比例控制中的穩(wěn)態(tài)誤差而引入的。其核心思想是將偏差隨時(shí)間的累積值進(jìn)行積分,然后根據(jù)積分值來(lái)調(diào)整控制量。積分控制的公式為:
u(t) = u(t-1) + Ki * ∫e(t)dt
其中,Ki表示積分系數(shù),∫e(t)dt表示偏差的積分值。
積分控制的優(yōu)點(diǎn)是可以消除穩(wěn)態(tài)誤差,但缺點(diǎn)是可能引起系統(tǒng)的過(guò)沖和振蕩。
- 微分控制(D控制)
微分控制是為了提高系統(tǒng)的穩(wěn)定性和響應(yīng)速度而引入的。其核心思想是預(yù)測(cè)偏差的變化趨勢(shì),然后根據(jù)變化趨勢(shì)來(lái)調(diào)整控制量。微分控制的公式為:
u(t) = u(t-1) + Kd * de(t)/dt
其中,Kd表示微分系數(shù),de(t)/dt表示偏差的變化率。
微分控制的優(yōu)點(diǎn)是可以提高系統(tǒng)的穩(wěn)定性和響應(yīng)速度,但缺點(diǎn)是對(duì)噪聲敏感,可能導(dǎo)致控制量的波動(dòng)。
二、PID控制器的設(shè)計(jì)方法
- 確定控制目標(biāo)
在設(shè)計(jì)PID控制器之前,首先需要明確控制目標(biāo),即希望系統(tǒng)輸出達(dá)到什么樣的狀態(tài)。控制目標(biāo)可以是穩(wěn)態(tài)誤差、超調(diào)量、上升時(shí)間等。
- 建立數(shù)學(xué)模型
根據(jù)實(shí)際系統(tǒng)的工作原理,建立數(shù)學(xué)模型。數(shù)學(xué)模型可以是線性的,也可以是非線性的。對(duì)于線性系統(tǒng),可以使用傳遞函數(shù)、狀態(tài)空間等方法進(jìn)行建模;對(duì)于非線性系統(tǒng),可以使用神經(jīng)網(wǎng)絡(luò)、模糊控制等方法進(jìn)行建模。
- 確定PID參數(shù)
根據(jù)控制目標(biāo)和數(shù)學(xué)模型,確定PID控制器的比例系數(shù)Kp、積分系數(shù)Ki和微分系數(shù)Kd。常用的參數(shù)整定方法有:
(1)經(jīng)驗(yàn)法:根據(jù)經(jīng)驗(yàn),選擇合適的比例系數(shù)、積分系數(shù)和微分系數(shù)。
(2)試湊法:通過(guò)不斷調(diào)整PID參數(shù),觀察系統(tǒng)響應(yīng),直至達(dá)到滿意的控制效果。
(3)優(yōu)化法:使用優(yōu)化算法(如遺傳算法、粒子群算法等)對(duì)PID參數(shù)進(jìn)行優(yōu)化,以獲得最佳的控制效果。
- 仿真驗(yàn)證
在確定了PID參數(shù)后,需要進(jìn)行仿真驗(yàn)證。仿真驗(yàn)證可以使用MATLAB、Simulink等軟件進(jìn)行。通過(guò)仿真驗(yàn)證,可以檢查PID控制器的性能是否滿足控制目標(biāo)。
- 實(shí)際應(yīng)用
在仿真驗(yàn)證通過(guò)后,將PID控制器應(yīng)用到實(shí)際系統(tǒng)中。在實(shí)際應(yīng)用過(guò)程中,可能需要對(duì)PID參數(shù)進(jìn)行微調(diào),以適應(yīng)實(shí)際工況的變化。
三、PID控制器的應(yīng)用領(lǐng)域
PID控制器因其簡(jiǎn)單、實(shí)用、易于實(shí)現(xiàn)等特點(diǎn),在工業(yè)控制領(lǐng)域得到了廣泛的應(yīng)用。常見(jiàn)的應(yīng)用領(lǐng)域包括:
- 溫度控制:如鍋爐、空調(diào)、化學(xué)反應(yīng)器等。
- 流量控制:如水泵、壓縮機(jī)、管道輸送等。
- 壓力控制:如液壓系統(tǒng)、氣動(dòng)系統(tǒng)等。
- 速度控制:如電機(jī)、輸送帶等。
- 位置控制:如機(jī)器人、起重機(jī)等。
- 化學(xué)反應(yīng)過(guò)程控制:如化學(xué)反應(yīng)器、發(fā)酵罐等。
四、PID控制器的優(yōu)缺點(diǎn)
- 優(yōu)點(diǎn)
(1)結(jié)構(gòu)簡(jiǎn)單:PID控制器由比例、積分、微分三個(gè)部分組成,結(jié)構(gòu)簡(jiǎn)單,易于理解和實(shí)現(xiàn)。
(2)參數(shù)易于調(diào)整:PID控制器的參數(shù)(Kp、Ki、Kd)可以根據(jù)控制目標(biāo)進(jìn)行調(diào)整,具有較好的靈活性。
(3)適用范圍廣:PID控制器適用于各種線性和非線性系統(tǒng),具有較好的普適性。
(4)實(shí)現(xiàn)成本低:PID控制器的實(shí)現(xiàn)成本較低,可以應(yīng)用于各種工業(yè)控制系統(tǒng)。
- 缺點(diǎn)
(1)對(duì)噪聲敏感:微分控制對(duì)噪聲敏感,可能導(dǎo)致控制量的波動(dòng)。
(2)參數(shù)整定困難:對(duì)于復(fù)雜的系統(tǒng),PID參數(shù)的整定可能比較困難,需要進(jìn)行多次試驗(yàn)和調(diào)整。
(3)無(wú)法處理非線性系統(tǒng):對(duì)于非線性系統(tǒng),PID控制器的性能無(wú)法處理非線性系統(tǒng)。
-
控制器
+關(guān)注
關(guān)注
114文章
16998瀏覽量
183144 -
非線性
+關(guān)注
關(guān)注
1文章
216瀏覽量
23544 -
工業(yè)控制
+關(guān)注
關(guān)注
38文章
1528瀏覽量
86753 -
PID控制器
+關(guān)注
關(guān)注
2文章
173瀏覽量
19097
發(fā)布評(píng)論請(qǐng)先 登錄
PID控制的原理及常用口訣總結(jié)
PID控制器的控制規(guī)律
pid控制器原理

基于RX和RL78的PID控制器設(shè)計(jì)應(yīng)用

13個(gè)基于PID控制器的設(shè)計(jì)實(shí)例
pid控制器的輸入輸出_PID控制器的控制實(shí)現(xiàn)
PID控制器控制電壓的詳細(xì)介紹和PID控制器的C程序的概述
pid控制器工作原理
PID控制的理論和PID控制器設(shè)計(jì)的及PID控制器參數(shù)整定的以及分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論