 【項目陪跑--無線CAN轉發器】第一章 課程概述
【項目陪跑--無線CAN轉發器】第一章 課程概述
第一節 項目概述
設計一款無線CAN轉發器,由若干個終端組成,若干個終端之間可以將接收到的CAN數據通過無線的方式轉發出去。
第二節 硬件概述
該CAN轉發器由24V供電。
該CAN轉發器的無線數據存在4個信道,不同信道的CAN轉發器無法收到數據,在復雜的條件下,無線傳輸距離不低于500m。
第三節 軟件概述
無線傳輸存在4個信道,初始化默認信道0,上電之后在100ms內切換信道,信道切換由特定的CAN幀控制。注意:上電初始化為信道0,其余3個信道由軟件切換。
CAN波特率采用250k,采用CAN2.0B擴展幀,8位數據幀。每間隔100ms需轉發7個CAN 幀。
以下是發送節點和接收節點的對應關系:
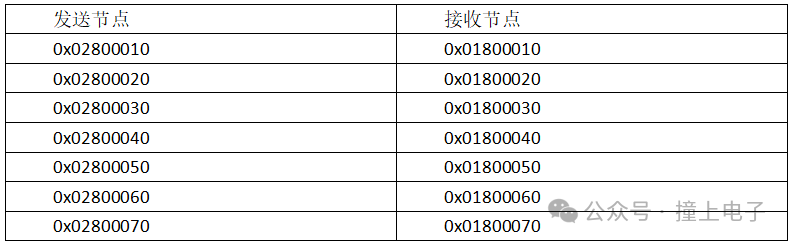
第一個CAN_ID為命令幀,該幀第一第二字節為幀頭0xA6和0x38,第三字節為發送數據命令(0x00)或切換信道命令(0x99),若為發送數據命令,則將7個CAN幀的數據按照ID順序組成一包,無線發送出去;若為切換信道命令,則通過第一個CAN_ID的第六個字節來切換到哪一個信道,一共三個信道,為信道1,信道2和信道3。注意:初始化為單獨的信道0。
其余CAN_ID皆為數據幀。
示例:
發送節點 | CAN節點數據 |
0x02800010 | A6 38 99 00 00 03 00 00 |
0x02800020 | 21 22 23 24 25 26 27 28 |
0x02800030 | 31 32 33 34 35 36 37 38 |
0x02800040 | 41 42 43 44 45 46 47 48 |
0x02800050 | 51 52 53 54 55 56 57 58 |
0x02800060 | 61 62 63 64 65 66 67 68 |
0x02800070 | 71 72 73 74 75 76 77 78 |
上面的第一個CAN_ID節點為:0x02800010,數據第一第二字節為0xA6和0x38,第三字節為命令字節,上述命令為0x99,為切換信道命令,第六個字節為0x03,則切換到第三個信道。
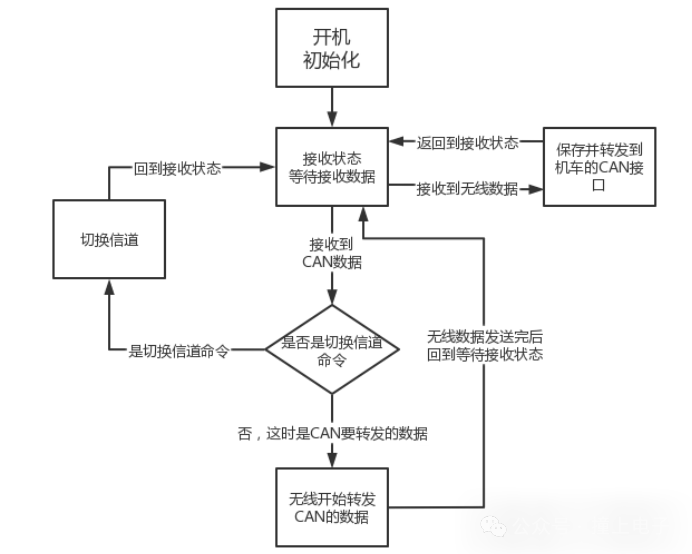
以下是流程圖:
第四節 學員作業
-
CAN
+關注
關注
57文章
2895瀏覽量
466907 -
無線
+關注
關注
31文章
5540瀏覽量
175529 -
轉發器
+關注
關注
0文章
49瀏覽量
12956
發布評論請先 登錄
【「# 運算放大器參數解析與LTspice應用仿真」閱讀體驗】+全書概覽與第一章閱讀分享
【第一章 透傳策略】手把手教你玩轉新版正點原子云
【「基于大模型的RAG應用開發與優化」閱讀體驗】+第一章初體驗
gps信號轉發器,北斗轉發器,導航信號轉發器
【「從算法到電路—數字芯片算法的電路實現」閱讀體驗】+閱讀第一章部分筆記
《RISC-V 體系結構編程與實踐(第2版)》第一章
《AI for Science:人工智能驅動科學創新》第一章人工智能驅動的科學創新學習心得
【「大模型時代的基礎架構」閱讀體驗】+ 第一、二章學習感受
【北京迅為】iTOP-LS2K0500開發板快速使用編譯環境ubuntu20.04第一章加載迅為提供 Ubuntu20.04
【北京迅為】itop-龍芯2k1000 sylixos 嵌入式實時系統燒寫手冊-第一章與第二章 詳細步驟

ISOUSB211高速/全速/低速隔離式USB轉發器數據表






 工商網監
工商網監
評論