 智慧園區視頻監控分析系統 YOLO
智慧園區視頻監控分析系統 YOLO

智慧園區視頻監控分析系統基本建設的持續推進,云計算技術、互聯網大數據、物聯網技術、人工智能技術等現代信息技術的深層次運用,智慧園區視頻監控分析系統發展趨勢革新的主要每日任務與現代信息技術的大力支持緊密聯系。智能化園區基本建設通常包含經營管理處、園區安全工作、耗能管理方法、消防管理、突發事件應對業務流程系統、園區業務、數據信息、頁面集成化,完成園區經營數據可視化、精細管理、決策。
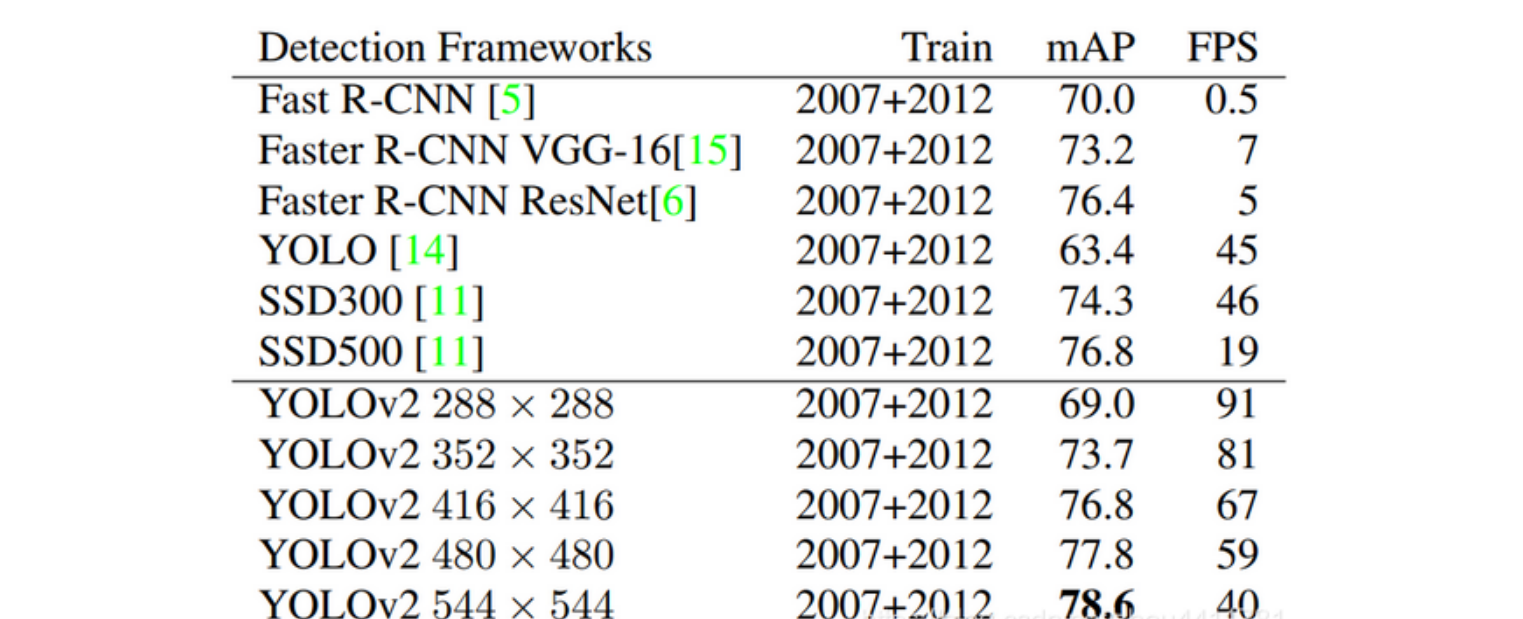
近幾年來,目標檢測算法取得了很大的突破。比較流行的算法可以分為兩類,一類是基于Region Proposal的R-CNN系算法(R-CNN,Fast R-CNN, Faster R-CNN),它們是two-stage的,需要先使用啟發式方法(selective search)或者CNN網絡(RPN)產生Region Proposal,然后再在Region Proposal上做分類與回歸。而另一類是Yolo,SSD這類one-stage算法,其僅僅使用一個CNN網絡直接預測不同目標的類別與位置。第一類方法是準確度高一些,但是速度慢,但是第二類算法是速度快,但是準確性要低一些。這可以在圖2中看到。本文介紹的是Yolo算法,其全稱是You Only Look Once: Unified, Real-Time Object Detection,其實個人覺得這個題目取得非常好,基本上把Yolo算法的特點概括全了:You Only Look Once說的是只需要一次CNN運算,Unified指的是這是一個統一的框架,提供end-to-end的預測,而Real-Time體現是Yolo算法速度快。
智慧園區視頻監控分析系統融合園區目前數據資料,為園區基礎設施建設、人車公共交通、安全性、產業布局、經濟發展、耗能、室內環境等管理方法方面的核心指標值給予數據可視化綜合性監控,幫助管理人員形象化操縱園區運作狀況,統一管理人員、事情、事物、園區綜合性運作。
class Yolo(object): def __init__(self, weights_file, verbose=True): self.verbose = verbose # detection params self.S = 7 # cell size self.B = 2 # boxes_per_cell self.classes = ["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train","tvmonitor"] self.C = len(self.classes) # number of classes # offset for box center (top left point of each cell) self.x_offset = np.transpose(np.reshape(np.array([np.arange(self.S)]*self.S*self.B), [self.B, self.S, self.S]), [1, 2, 0]) self.y_offset = np.transpose(self.x_offset, [1, 0, 2]) self.threshold = 0.2 # confidence scores threhold self.iou_threshold = 0.4 # the maximum number of boxes to be selected by non max suppression self.max_output_size = 10
智慧園區視頻監控分析系統監控,包含監控園區人員駕駛車輛、工作人員相對密度、公共交通、停車場應用、集成化視頻監控系統、依靠人工智能技術面部識別和車輛識別分析分辨,協助管理人員同步控制交通情況,合理減小工作人員、車子出現異常滯留。生態公園安全防護管理方法的監控和監控必須對生態公園內的建筑物開展系統分區層訪問和信息化管理。適用安全事故警報提醒,完成迅速精準定位,可隨時隨地獲得事情周邊的監控視頻,協助管理人員提升安全管理高效率。
-
圖像識別系統
+關注
關注
0文章
12瀏覽量
7241 -
分析系統
+關注
關注
0文章
59瀏覽量
8255 -
行為分析
+關注
關注
0文章
36瀏覽量
1941 -
人工智能算法
+關注
關注
0文章
62瀏覽量
5524
發布評論請先 登錄
分析智慧園區建設的關鍵問題

智慧園區綜合管理系統
化工園區智慧園區管理系統
園區智慧路燈物聯網遠程監控系統方案






 工商網監
工商網監
評論