") RT-Thread內部機制大揭秘,帶你深入操作系統(tǒng)內核
RT-Thread內部機制大揭秘,帶你深入操作系統(tǒng)內核
一、RT-Thread概述
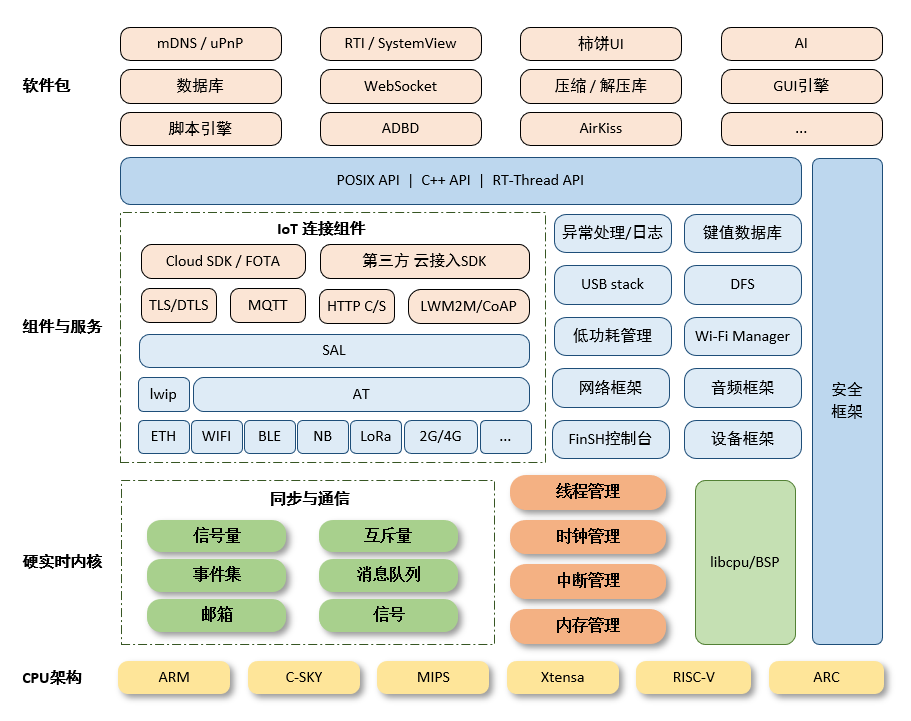
RT-Thread 是一款具有顯著優(yōu)勢的開源嵌入式實時操作系統(tǒng)。它不僅具備輕量級、實時性強的特點,還擁有廣泛的開源社區(qū)支持和豐富的應用場景。
在輕量級方面,RT-Thread 能夠適應資源受限的嵌入式環(huán)境,通過高效的內核設計和資源管理,為設備節(jié)省寶貴的系統(tǒng)資源。其小巧的內核可以在極小的存儲空間中運行,為小型設備提供了可靠的操作系統(tǒng)選擇。
實時性是 RT-Thread 的核心優(yōu)勢之一。它具備快速的任務響應能力和精確的時間控制,能夠滿足對時間敏感的應用需求,如工業(yè)控制、航空航天等領域。
RT-Thread 的開源特性促進了其快速發(fā)展和廣泛應用。眾多開發(fā)者能夠參與到其代碼貢獻和改進中,不斷豐富其功能和優(yōu)化性能。
在嵌入式系統(tǒng)領域,RT-Thread 得到了廣泛的應用。從智能家居中的智能家電控制,到工業(yè)自動化中的生產流程監(jiān)控,再到汽車電子中的車載系統(tǒng),都能看到它的身影。其強大的功能和良好的適應性,使得各類嵌入式設備能夠穩(wěn)定、高效地運行。
總之,RT-Thread 以其開源、輕量級和實時性等特點,在嵌入式系統(tǒng)領域發(fā)揮著重要作用,為開發(fā)者提供了可靠、高效的操作系統(tǒng)解決方案。
二、RT-Thread啟動流程
系統(tǒng)上電后,首先從啟動文件開始運行。啟動文件通常會完成一些基礎的硬件設置,如初始化時鐘、配置中斷向量表以及初始化堆棧等。
接著,程序跳轉至 RT-Thread 的入口函數(shù) rtthread_startup 。在這個函數(shù)中,一系列重要的初始化工作依次展開。
首先是硬件初始化,包括設置系統(tǒng)時鐘、初始化相關外設等,為后續(xù)的系統(tǒng)運行提供硬件基礎。
然后是系統(tǒng)內核對象的創(chuàng)建,如定時器、調度器等。這些內核對象的創(chuàng)建為系統(tǒng)的任務調度和時間管理提供了支持。
接下來創(chuàng)建 main 線程,同時會對線程棧進行初始化。main 線程通常承擔著用戶應用程序的主要邏輯。
在 rtthread_startup 函數(shù)中,還會進行定時器和調度器的初始化。定時器初始化確保系統(tǒng)能夠進行精確的定時操作,調度器初始化則為任務的合理分配和切換奠定基礎。
在完成這些初始化工作后,系統(tǒng)準備就緒,等待調度器啟動,從而開啟系統(tǒng)的正常運行和任務調度。
總的來說,RT-Thread 的啟動流程嚴謹有序,通過逐步完成各項初始化工作,為系統(tǒng)的穩(wěn)定運行和高效任務處理提供了有力保障。
三、程序內存分布
Code(代碼段):Code 段存放程序的代碼部分。在編譯時確定其大小,運行時其內容不發(fā)生改變。在程序編譯時,代碼段占用一定的 Flash 空間,運行時 CPU 從 Flash 中讀取執(zhí)行代碼。
RO-data(只讀數(shù)據(jù)段):RO-data 段用于存放程序中定義的常量,如字符串常量等。這些數(shù)據(jù)在編譯時確定,且在運行時不可更改,位于 Flash 中。RO-data 段在編譯時占用 Flash 空間。
RW-data(讀寫數(shù)據(jù)段):RW-data 段存放初始化為非 0 值的全局變量。在編譯時,其占用一定的 Flash 空間;在運行時,由于其中的數(shù)據(jù)需要讀寫操作,所以 RW-data 中的數(shù)據(jù)會被從 Flash 搬運到 RAM 中。
ZI-data(0 數(shù)據(jù)段):ZI-data 段存放未初始化或初始化為 0 的全局變量。ZI-data 段在編譯時不占用 Flash 空間,在運行時根據(jù)編譯器給出的 ZI 地址和大小在 RAM 中分配空間,并將其清零。
總的來說,在編譯時,RO Size 包括 Code 及 RO-data,表示程序占用 Flash 空間的大小;RW Size 包括 RW-data 及 ZI-data,表示運行時占用的 RAM 大小;ROM Size 包括 Code、RO Data 以及 RW Data,表示燒寫程序所占用的 Flash 空間大小。程序運行時,CPU 從 Flash 讀取 Code 段和 RO-data 段的內容,從 RAM 讀寫 RW-data 段和 ZI-data 段的數(shù)據(jù)。
四、自動初始化機制
RT-Thread 的自動初始化機制通過巧妙的宏定義方式實現(xiàn)。在函數(shù)定義處使用特定的宏聲明初始化函數(shù),這些函數(shù)會在系統(tǒng)啟動過程中自動被執(zhí)行,無需手動調用。
INIT_BOARD_EXPORT 主要用于非常早期的初始化,例如芯片相關硬件的初始化,此時調度器還未啟動。它適用于那些在系統(tǒng)啟動極早期就必須完成的關鍵硬件初始化操作。
INIT_PREV_EXPORT 用于純軟件的初始化,通常是沒有太多依賴的函數(shù)。比如一些簡單的軟件配置或早期的軟件模塊初始化。
INIT_DEVICE_EXPORT 針對外設驅動的初始化,如網卡設備等。在需要對外設進行初始化以便后續(xù)系統(tǒng)正常使用時使用。
INIT_COMPONENT_EXPORT 主要用于組件的初始化,像文件系統(tǒng)或者 LWIP 等組件的初始化就可通過此宏。
INIT_ENV_EXPORT 用于系統(tǒng)環(huán)境的初始化,比如掛載文件系統(tǒng)等操作。
INIT_APP_EXPORT 則用于應用的初始化,比如 GUI 應用等。
通過這些不同類型的自動初始化接口,開發(fā)者能夠根據(jù)具體的初始化需求,將函數(shù)放置在合適的初始化階段,確保系統(tǒng)在啟動過程中有序、高效地完成各項初始化工作,提高了開發(fā)效率和系統(tǒng)的穩(wěn)定性。
五、內核對象模型
RT-Thread 的內核對象豐富多樣,包括線程、信號量、郵箱、消息隊列、內存池等。
線程:是 RT-Thread 中最基本的調度單位,描述了任務執(zhí)行的上下文關系和優(yōu)先等級。線程控制塊存儲了線程的關鍵信息,如優(yōu)先級、狀態(tài)、棧地址等。
信號量:用于解決線程間的同步和互斥問題。通過信號量的計數(shù)值來控制資源的訪問,當計數(shù)值為 0 時,申請資源的線程會被阻塞。
郵箱:實現(xiàn)線程間的消息傳遞,能夠存儲一定量的消息數(shù)據(jù)。
消息隊列:可以存儲多個消息,支持不同線程之間的異步通信。
內存池:用于高效地管理內存分配和釋放,提高內存使用效率。
內核對象管理框架通過鏈表來管理各類對象。每個內核對象類型都有對應的鏈表,對象通過鏈表節(jié)點進行連接。例如,線程對象通過線程鏈表進行管理。
對象的派生和繼承關系帶來了顯著的優(yōu)勢。一方面,提高了系統(tǒng)的可重用性和擴展性。新的對象類別可以在繼承通用屬性的基礎上進行少量擴展即可創(chuàng)建,降低了開發(fā)難度。另一方面,提供了統(tǒng)一的對象操作方式,簡化了具體對象的操作流程,提高了系統(tǒng)的可靠性和穩(wěn)定性。例如,線程控制塊在繼承通用對象結構的基礎上,增加了線程特有的屬性,使得線程管理更加精準和高效。
六、線程管理
6.1 多線程的基本概念與 RT-Thread 中的實現(xiàn)
在操作系統(tǒng)中,多線程是將一個大型任務分解為多個可獨立執(zhí)行的小任務,從而提高系統(tǒng)的并發(fā)處理能力。在 RT-Thread 中,通過線程控制塊來管理線程,每個線程都有自己的執(zhí)行環(huán)境和優(yōu)先級。線程之間可以通過共享資源和通信機制進行協(xié)作。
6.2 線程的相關屬性
線程棧:RT-Thread 中線程具有獨立的棧,用于存儲線程運行時的局部變量和上下文信息。線程切換時,上下文會保存到棧中,恢復運行時再從棧中讀取。
線程狀態(tài):線程存在初始、就緒、運行、掛起和關閉這五種狀態(tài)。初始狀態(tài)表示線程剛創(chuàng)建未運行;就緒狀態(tài)意味著線程準備好等待被調度執(zhí)行;運行狀態(tài)表示線程正在占用 CPU 執(zhí)行;掛起狀態(tài)通常是由于資源不可用或主動延時導致線程暫時不參與調度;關閉狀態(tài)則表示線程已結束。
線程優(yōu)先級:RT-Thread 支持最多 256 個優(yōu)先級,數(shù)值越小優(yōu)先級越高,0 為最高優(yōu)先級。可根據(jù)實際需求為不同線程設置優(yōu)先級,以決定線程被調度的先后順序。
時間片:時間片僅對相同優(yōu)先級的就緒態(tài)線程有效。它決定了同一優(yōu)先級線程每次被調度執(zhí)行的時長,影響系統(tǒng)的響應性和任務切換頻率。
6.3 系統(tǒng)線程
空閑線程:空閑線程是系統(tǒng)中優(yōu)先級最低的線程,其狀態(tài)永遠為就緒態(tài)。當系統(tǒng)中無其他就緒線程時,調度器會調度空閑線程。它通常是一個死循環(huán),用于執(zhí)行一些后臺任務,如資源回收、功耗管理等。
主線程:在系統(tǒng)啟動時創(chuàng)建,入口函數(shù)為 main_thread_entry 。用戶的應用入口函數(shù) main 從這里開始,用戶可在 main 函數(shù)中添加應用程序的初始化代碼。
6.4 線程調度的相關API
啟動:通過 rt_thread_startup 函數(shù)將創(chuàng)建或初始化后的線程調入相應優(yōu)先級的就緒隊列,等待被調度執(zhí)行。
獲取當前:使用 rt_thread_self 函數(shù)可以獲取當前正在執(zhí)行的線程句柄。
讓出資源:rt_thread_yield 函數(shù)使當前線程讓出 CPU 資源,相同優(yōu)先級的其他線程將被執(zhí)行。
睡眠:rt_thread_sleep 、 rt_thread_delay 和 rt_thread_mdelay 等函數(shù)可使當前線程掛起指定時間,時間結束后線程重新進入就緒狀態(tài)。
掛起和恢復:rt_thread_suspend 函數(shù)掛起線程, rt_thread_resume 函數(shù)恢復被掛起的線程。
控制:rt_thread_control 函數(shù)可用于動態(tài)更改線程的優(yōu)先級等屬性。
七、時鐘管理
7.1 時鐘節(jié)拍的概念和作用
時鐘節(jié)拍(OS Tick)是 RT-Thread 操作系統(tǒng)的最小時間單位,它就如同系統(tǒng)的心跳,為系統(tǒng)處理各種與時間相關的事件提供了基準。在 RT-Thread 中,時鐘節(jié)拍被廣泛應用于線程延時、時間片輪轉以及定時器超時等方面。
在線程延時方面,通過時鐘節(jié)拍來精確控制線程暫停的時間,確保線程按照預定的時間間隔執(zhí)行。
對于時間片輪轉調度,時鐘節(jié)拍用于確定每個線程占用 CPU 的時間片長度,實現(xiàn)線程之間的公平輪轉執(zhí)行,提高系統(tǒng)的并發(fā)處理能力。
而在定時器超時方面,時鐘節(jié)拍的作用至關重要。當定時器設定的時間達到對應的時鐘節(jié)拍數(shù)時,就會觸發(fā)超時操作,執(zhí)行相應的回調函數(shù)。
7.2 時鐘節(jié)拍的實現(xiàn)原理
RT-Thread 中時鐘節(jié)拍的實現(xiàn)依賴于硬件定時器的觸發(fā)。通常,系統(tǒng)會配置一個硬件定時器為中斷觸發(fā)模式,比如對于 Cortex-M 芯片來說,常用的是滴答定時器 Systick。
當中斷產生時,會調用一系列函數(shù)進行計數(shù)和處理。在中斷服務函數(shù)中,會執(zhí)行關鍵的操作。
-
嵌入式
+關注
關注
5143文章
19567瀏覽量
315625 -
內核
+關注
關注
3文章
1411瀏覽量
41165 -
操作系統(tǒng)
+關注
關注
37文章
7108瀏覽量
125085 -
RT-Thread
+關注
關注
32文章
1375瀏覽量
41594
發(fā)布評論請先 登錄
如何對RT-Thread內核有基本的了解?
一文讀懂RT-Thread操作系統(tǒng)的郵箱機制
基于RT-Thread操作系統(tǒng)衍生rt-smart實時操作系統(tǒng)簡介
RT-Thread操作系統(tǒng)有哪些優(yōu)勢?
RT-Thread編程指南
RT-Thread Smart微內核操作系統(tǒng)發(fā)布!
國民技術攜手RT-Thread共同推進MCU與RT-Thread操作系統(tǒng)廣泛適配
RT-Thread 內核學習筆記 - 內核對象鏈表結構深入理解

RT-Thread 內核學習筆記 - 內核對象操作API
RT-Thread實時操作系統(tǒng)安裝向導
大佬帶你理解RT-Thread內核并上手實踐
RT-Thread操作系統(tǒng)的FreeRTOS兼容層
如何深入理解RT-Thread內核并上手實踐,看完這篇有答案了!

新書發(fā)布——《實時操作系統(tǒng)應用技術:RT-Thread與ARM編程實踐》

新書發(fā)布——《RT-Thread嵌入式實時操作系統(tǒng)內核、驅動和應用開發(fā)技術》





 工商網監(jiān)
工商網監(jiān)
評論