 第五章-V1.5 HC05藍牙模塊使用 STM32串口接受中斷 HC05藍牙模塊連手機
第五章-V1.5 HC05藍牙模塊使用 STM32串口接受中斷 HC05藍牙模塊連手機

功能介紹放開頭, 使用便捷無需愁。
這是全網最詳細、性價比最高的STM32實戰項目入門教程,通過合理的硬件設計和詳細的視頻筆記介紹,硬件使用STM32F103主控資料多方便學習,通過3萬字筆記、12多個小時視頻、20多章節代碼手把手教會你如何開發和調試。讓你更快掌握嵌入式系統開發。
V1.5.0-STM32智能小車
V1.5.0:庫函數開發。功能:循跡、避障、跟隨、遙控、電池電壓顯示等。
視頻合集鏈接推薦觀看
[https://www.bilibili.com/video/BV1SY411L7rJ/?spm_id_from=333.337.search-card.all.click]
**V3.3.0-STM32智能小車 **
V3:HAL庫開發、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、PID角度控制、視覺控制、電磁循跡、RTOS等功能。
視頻合集鏈接推薦觀看
[https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click]
串口接收發送
STM32串口初始化
這里先初始化使用串口1
//串口1中斷服務程序
//注意,讀取USARTx- >SR能避免莫名其妙的錯誤
u8 USART_RX_BUF[USART_REC_LEN]; //接收緩沖,最大USART_REC_LEN個字節.
//接收狀態
//bit15, 接收完成標志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字節數目
u16 USART_RX_STA=0; //接收狀態標記
void uart_init(u32 bound){
//GPIO端口設置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
//使能USART1,GPIOA時鐘
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器
//USART 初始化設置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟串口接受中斷
USART_Cmd(USART1, ENABLE); //使能串口1
}
在main中定義標志位
int g_USART1_FLAG1 = 0; //串口控制標志位
在usart.h中聲明變量
extern int g_USART1_FLAG1 ;
在中斷服務函數添加處理
void USART1_IRQHandler(void) //串口1中斷服務程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中斷(接收到的數據必
須是0x0d 0x0a結尾)
{
Res =USART_ReceiveData(USART1); //讀取接收到的數據
if(Res == 'A') g_USART1_FLAG1 = 1 ; //根據接受的數據 置為標志位
if(Res == 'B')g_USART1_FLAG1 = 2 ;
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始
else USART_RX_STA|=0x8000; //接收完成了
}
else //還沒收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA >(USART_REC_LEN-1))USART_RX_STA=0;//接收數據錯
誤,重新開始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntExit();
#endif
}
調用初始化函數
uart_init(115200); //串口初始化為115200
在main.c 的邏輯
while(1)
{
//串口
if(g_USART1_FLAG1 == 1){
LED =! LED;
}
if(g_USART3_FLAG1 == 2) {
LED =! LED;
}
}
?
測試單片機串口
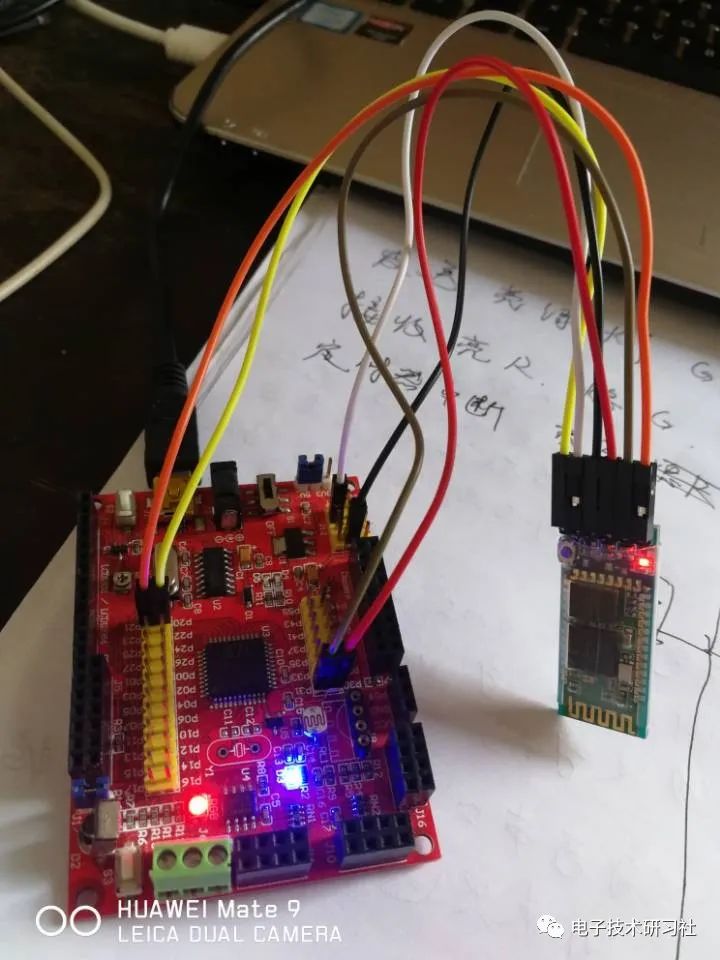
TTL與單片機連接
TTL插入電腦,使用串口助手->選擇端口->更改波特率115200->發送數據
現象 發送A 或B 可以使小燈反轉、發送其他命令無現象。
配置藍牙
更改藍牙波特率
見硬件藍牙介紹
我們在AT模式下設置發送AT指令:AT+UART=115200,0,0
測試藍牙
斷電重啟藍牙,更改軟件波特率為115200,打開手機藍牙與HC-05配對 (密碼:1234)
使用藍牙調試器(應用商店下載即可),發送aa 觀察電腦串口軟件
手機APP-藍牙調試器的設置方法
調試成功 :藍牙軟件和串口軟件能夠通訊
練一練--藍牙控制小燈
連接如圖
通過發送A或者B 控制單片機小燈反轉
那么上面我們就完成了藍牙的基本控制
然后我們就可以藍牙反轉燈的時候控制小車前行停止
//串口
if(g_USART1_FLAG1 == 1){
g_USART1_FLAG1 = 0;
//左電機慢速正轉
AIN1=0;
AIN2=1;
TIM_SetCompare4(TIM1,1700); //設置
//右邊電機慢速執行
BIN1 =1;
BIN2 =0;
TIM_SetCompare1(TIM1,1700);
LED =! LED;
}
if(g_USART1_FLAG1 == 2) {
g_USART1_FLAG1 = 0;
//雙電機停止
BIN1 = 0;
BIN2 = 0;
AIN1 = 0;
AIN2 =0;
LED =! LED;
}
?
上面是通過串口一(PA9 PA10)
藍牙硬件是串口三(PB10 PB11)下面我們通過串口三實現
初始化使用串口3
//初始化串口3
void uart_init_3(u32 bound){
//GPIO端口設置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); //使能USART3
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //,GPIOB時鐘
//USART3_TX GPIOB.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB.10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB.10
//USART3_RX GPIOB.11初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;//PB11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB.11
//Usart3 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的參數初始化VIC寄存器
//USART 初始化設置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART3, &USART_InitStructure); //初始化串口3
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//開啟串口接受中斷
USART_Cmd(USART3, ENABLE); //使能串口3
}
在main中定義標志位
int g_USART3_FLAG1 = 0; //串口3控制標志位
在usart.h中聲明變量
extern int g_USART3_FLAG1 ;
在中斷服務函數添加處理
//串口3 中斷處理函數
void USART3_IRQHandler (void)
{
u8 Res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
Res =USART_ReceiveData(USART3); //讀取接收到的數據
if(Res == 'A') g_USART3_FLAG1 = 1 ; //根據接受的數據 置為標志位
if(Res == 'B')g_USART3_FLAG1 = 2 ;
}
}
調用初始化函數
uart_init_3(115200); //初始化串口3
在main.c 編寫邏輯
while(1)
{
//串口
if(g_USART3_FLAG1 == 1){
g_USART3_FLAG1 = 0;
//左電機慢速正轉
AIN1=0;
AIN2=1;
TIM_SetCompare4(TIM1,1700); //設置
//右邊電機慢速執行
BIN1 =1;
BIN2 =0;
TIM_SetCompare1(TIM1,1700);
LED =! LED;
}
if(g_USART3_FLAG1 == 2) {
g_USART3_FLAG1 = 0;
//雙電機停止
BIN1 = 0;
BIN2 = 0;
AIN1 = 0;
AIN2 =0;
LED =! LED;
}
}
把藍牙安裝順序連接到STM32
跳線帽改至藍牙
手機連接藍牙 使用藍牙調試器發送 A 或者 B
現象:發送A 小車直行、發送B小車停止。
練一練--藍牙控制小車運動
USART中斷服務函數
//串口3 中斷處理函數
void USART3_IRQHandler (void)
{
u8 Res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
Res =USART_ReceiveData(USART3); //讀取接收到的數據
if(Res == 'A') g_USART3_FLAG1 = 1 ; //根據接受的數據 置為標志位
if(Res == 'B')g_USART3_FLAG1 = 2 ;
if(Res == 'C') g_USART3_FLAG1 = 3 ; //根據接受的數據 置為標志位
if(Res == 'D')g_USART3_FLAG1 = 4 ;
if(Res == 'E')g_USART3_FLAG1 = 5;
}
}
main 中的邏輯
while(1)
{
if(g_USART3_FLAG1 == 1) //前進
{
g_USART3_FLAG1=0;
Forward();
delay_ms(500);
}
if(g_USART3_FLAG1 == 2) //向右
{
g_USART3_FLAG1=0;
Rightward();
delay_ms(500);
}
if(g_USART3_FLAG1 ==3) //向左
{
g_USART3_FLAG1=0;
Leftward();
delay_ms(500);
}
if(g_USART3_FLAG1 ==4) //向后
{
g_USART3_FLAG1=0;
Backward();
delay_ms(500);
}
if(g_USART3_FLAG1 ==5) //停止
{
g_USART3_FLAG1=0;
AIN1=0;
AIN2=0;
BIN1=0;
BIN2=0;
delay_ms(500);
}
}
手機中藍牙調試助手的設計
練一練--把數據發送給電腦串口助手和手機APP
前面我們介紹了,如何通過電腦或者藍牙APP,向單片機發送數據,下面我們介紹如何:單片機如何向
電腦和藍牙APP發送數據。
庫函數提供了相關串口函數,但是每次只能發送一個字節
USART_SendData(USART1,'X');//通過庫函數發送字節數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) == RESET);//判斷發送標志位,是否發送
結束
在正點原子例程中完成了對printf的重映射,所以我們可以輕松的通過printf ()函數向串口1 發送不定長
數據,這是正點原子的例程
struct __FILE
{
int handle;
};
FILE __stdout;
//定義_sys_exit()以避免使用半主機模式
void _sys_exit(int x)
{
x = x;
}
//重定義fputc函數
int fputc(int ch, FILE *f)
{
while((USART1- >SR&0X40)==0);//循環發送,直到發送完畢 通過SR寄存器判斷是否發送完成
USART1- >DR = (u8) ch; //通過DR寄存器發送數據
return ch;
}
那么我們如何實現任意串口都可以任性發送那?
這里我們使用vsprintf 格式化字符串來完成
需要包含的頭文件
#include "stdarg.h"
void UsartPrintf(USART_TypeDef * USARTx,char * fmt ,...)
{
unsigned char UsartPrintfBuf[256]; //定義一個字符串數組
va_list ap;//初始化指向參數列表的指針
unsigned char *pStr = UsartPrintfBuf; //指針指向數組首地址
va_start(ap,fmt);//將第一個可變參數的地址付給ap,即ap 指向可變參數列表的開始
vsprintf((char *)UsartPrintfBuf, fmt,ap);
//將參數fmt、ap 指向的可變參數一起轉化成格式化字符串,放string數組中,作用同sprintf
(),只是參數類型不同
va_end(ap); //清除指針
while(*pStr != 0) //判斷是否發送完字符串
{
//while(USART_GetFlagStatus(USART3,USART_FLAG_TC == RESET));//判斷發送標志
位,是否發送結束
USART_SendData(USARTx,*pStr++);//通過庫函數發送字符串
//pStr ++;
while(USART_GetFlagStatus(USARTx,USART_FLAG_TC) == RESET);//判斷發送標志
位,是否發送結束
}
}
參考資料:
在main 中調用函數
UsartPrintf(USART3,"Distance:%dMode:%d",TCRT5000_Dist(),Mode);
在手機APP顯示數據
審核編輯 黃宇
-
STM32
+關注
關注
2291文章
11022瀏覽量
363356 -
串口
+關注
關注
14文章
1586瀏覽量
79531 -
HC05
+關注
關注
2文章
29瀏覽量
26519 -
藍牙模塊
+關注
關注
30文章
604瀏覽量
56558
發布評論請先 登錄
HC05藍牙串口模塊的原理圖和源代碼配套軟件及實驗說明

HC05與STM32進行串口通訊實現與手機APP的數據透傳

STM32 + HC05串口藍牙設計簡易的藍牙音箱





 工商網監
工商網監
評論