") ARMxy ARM工業(yè)控制器帶GPIO,DI,DO應(yīng)用于無人車避障系統(tǒng)
ARMxy ARM工業(yè)控制器帶GPIO,DI,DO應(yīng)用于無人車避障系統(tǒng)

隨著工業(yè)自動(dòng)化技術(shù)的迅速發(fā)展,自動(dòng)導(dǎo)引車(AGV)作為工業(yè)自動(dòng)化運(yùn)輸?shù)年P(guān)鍵設(shè)備,其智能化、高效性和穩(wěn)定性引起了廣泛關(guān)注。ARMxy ARM工業(yè)控制器以其卓越的處理能力、豐富的接口資源及高度的靈活性,在AGV領(lǐng)域內(nèi)獲得了廣泛應(yīng)用。本文將探討ARMxy ARM工業(yè)控制器如何通過支持CAN、RS485、DI、DO、WIFI和5G等接口技術(shù),在AGV中發(fā)揮其獨(dú)特的優(yōu)勢(shì)。
一、ARMxy ARM工業(yè)控制器的核心優(yōu)勢(shì)
1.強(qiáng)大的處理器架構(gòu)
ARMxy ARM工業(yè)控制器采用先進(jìn)的ARM處理器架構(gòu),例如瑞芯微RK3568J/RK3568B2或全志科技T507-H等高性能處理器,提供四核ARM Cortex-A53或ARM Cortex-A55處理器,主頻高達(dá)1.4GHz至2.0GHz。這些處理器確保了系統(tǒng)的高速運(yùn)行和強(qiáng)大的數(shù)據(jù)處理能力,滿足了AGV在復(fù)雜環(huán)境中的實(shí)時(shí)計(jì)算需求。
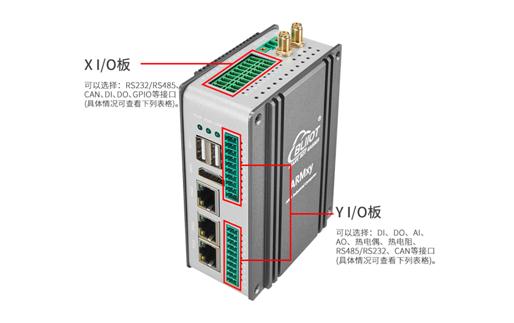
2.豐富的接口資源
CAN接口:CAN總線是工業(yè)自動(dòng)化中常用的通信協(xié)議,具有高可靠性、實(shí)時(shí)性和抗干擾性。ARMxy控制器通過CAN接口,能夠?qū)崿F(xiàn)AGV與PLC、傳感器等設(shè)備之間的穩(wěn)定通信。
RS485接口:RS485是一種支持長(zhǎng)距離、高速率數(shù)據(jù)傳輸?shù)拇锌偩€標(biāo)準(zhǔn)。在AGV應(yīng)用中,它通常用于連接各種傳感器和執(zhí)行器,如電機(jī)驅(qū)動(dòng)器、編碼器、光電傳感器等,以實(shí)現(xiàn)精確的位置控制和狀態(tài)監(jiān)測(cè)。
DI/DO接口:數(shù)字輸入(DI)和數(shù)字輸出(DO)接口用于連接開關(guān)量傳感器和執(zhí)行器,如限位開關(guān)、指示燈等。ARMxy控制器通過這些接口,可以實(shí)現(xiàn)對(duì)AGV的啟停控制、安全保護(hù)等功能。

3.無線通信
ARMxy ARM工業(yè)控制器支持WIFI和4G/5G等無線通信技術(shù),為AGV提供了更加靈活的通信方式。
WIFI模塊:通過內(nèi)置的WIFI模塊,AGV可以無線連接到局域網(wǎng)或互聯(lián)網(wǎng),實(shí)現(xiàn)遠(yuǎn)程通信和數(shù)據(jù)交換,便于系統(tǒng)的遠(yuǎn)程監(jiān)控和管理。
4G/5G模塊:隨著5G技術(shù)的普及,其低延遲、高帶寬的特點(diǎn)為AGV的實(shí)時(shí)通信和大數(shù)據(jù)處理提供了強(qiáng)有力的支持。ARMxy控制器通過集成5G模塊,可以實(shí)現(xiàn)AGV在復(fù)雜工業(yè)環(huán)境中的高速數(shù)據(jù)傳輸和實(shí)時(shí)響應(yīng)。
二、在AGV中的應(yīng)用實(shí)例
1.路徑規(guī)劃與導(dǎo)航
ARMxy ARM工業(yè)控制器通過集成先進(jìn)的算法和傳感器,可以實(shí)現(xiàn)對(duì)AGV的精確路徑規(guī)劃和導(dǎo)航。控制器處理來自激光雷達(dá)、攝像頭等傳感器的數(shù)據(jù),結(jié)合內(nèi)置的地圖和路徑規(guī)劃算法,可以實(shí)時(shí)計(jì)算并調(diào)整AGV的行駛路徑,確保其在復(fù)雜環(huán)境中準(zhǔn)確、高效地完成任務(wù)。
2.障礙物檢測(cè)與避障
ARMxy控制器通過集成多種傳感器和實(shí)時(shí)圖像處理技術(shù),能夠?qū)崿F(xiàn)對(duì)AGV周圍環(huán)境的實(shí)時(shí)監(jiān)測(cè)和障礙物檢測(cè)。一旦檢測(cè)到障礙物,控制器會(huì)立即啟動(dòng)避障算法,調(diào)整AGV的行駛方向或速度,確保其在行駛過程中的安全性和穩(wěn)定性。
3.遠(yuǎn)程監(jiān)控與管理
通過WIFI和4G/5G模塊,ARMxy ARM工業(yè)控制器可以實(shí)現(xiàn)AGV的遠(yuǎn)程監(jiān)控和管理。管理人員可以通過手機(jī)、電腦等終端設(shè)備實(shí)時(shí)查看AGV的運(yùn)行狀態(tài)、位置信息和任務(wù)執(zhí)行情況,并進(jìn)行遠(yuǎn)程調(diào)度和控制,從而提高管理效率,降低人力成本。
4.數(shù)據(jù)采集與分析
ARMxy控制器具備強(qiáng)大的數(shù)據(jù)采集和分析能力。通過集成的各種傳感器和接口,控制器可以實(shí)時(shí)采集AGV的運(yùn)行數(shù)據(jù)、環(huán)境參數(shù)等信息,并進(jìn)行初步的分析和處理,用于優(yōu)化AGV的運(yùn)行策略、提高系統(tǒng)的穩(wěn)定性和可靠性。
三、結(jié)論
ARMxy ARM工業(yè)控制器憑借其強(qiáng)大的處理能力、豐富的接口資源和靈活的無線通信能力,在AGV領(lǐng)域展現(xiàn)出顯著的技術(shù)優(yōu)勢(shì)。通過支持CAN、RS485、DI、DO以及WIFI、5G等接口,ARMxy控制器為AGV提供了全面的通信和控制解決方案,實(shí)現(xiàn)了AGV在復(fù)雜工業(yè)環(huán)境中的高效、穩(wěn)定和智能化運(yùn)行。

審核編輯 黃宇
-
ARM
+關(guān)注
關(guān)注
134文章
9347瀏覽量
377138 -
控制器
+關(guān)注
關(guān)注
114文章
17088瀏覽量
184065 -
CAN
+關(guān)注
關(guān)注
57文章
2917瀏覽量
467608 -
GPIO
+關(guān)注
關(guān)注
16文章
1280瀏覽量
54009
發(fā)布評(píng)論請(qǐng)先 登錄
肇觀電子兩款無人機(jī)視覺避障模組量產(chǎn)交付
在工業(yè)自動(dòng)化領(lǐng)域AI,AO,DI,DO是什么,它有什么作用
通過OpenScada在ARMxy邊緣計(jì)算網(wǎng)關(guān)上實(shí)現(xiàn)工業(yè)互聯(lián)網(wǎng)

為何嵌入式控制器首選ARMxy?深度解析

機(jī)智云開源自動(dòng)化控制篇-避障式舵機(jī)轉(zhuǎn)向系統(tǒng)

plc控制器主要應(yīng)用于哪些方面
ARMxy工業(yè)控制器為視頻監(jiān)控提供1Tops算力支持

用ARMxy ARM工業(yè)控制器自帶的1Tops算力實(shí)現(xiàn)高性能圖像處理

ARMxy ARM工業(yè)控制器支持Linux、Ubuntu、Debian操作系統(tǒng)用于二次開發(fā)

ARMxy ARM物聯(lián)網(wǎng)邊緣計(jì)算網(wǎng)關(guān)支持Node-RED用于云邊端一體化

ARMxy ARM工業(yè)邊緣計(jì)算網(wǎng)關(guān)帶Ubuntu OS支持二次開發(fā)
ARMxy ARM工業(yè)控制器帶CAN,RS485,DI,DO,HDMI,4G應(yīng)用于收費(fèi)站

ARMxy ARM工業(yè)控制器支持深度學(xué)習(xí)應(yīng)用于物體檢測(cè)
ARMxy工業(yè)控制器BL340:通過BLRAT簡(jiǎn)化遠(yuǎn)程訪問與運(yùn)維流程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論