") 特斯拉智能駕駛|從視覺優(yōu)先的技術(shù)路徑到未來的挑戰(zhàn)?
特斯拉智能駕駛|從視覺優(yōu)先的技術(shù)路徑到未來的挑戰(zhàn)?

特斯拉作為全球智能駕駛領(lǐng)域的技術(shù)先鋒,其FSD(Full Self-Driving)方案選擇了獨(dú)特的純視覺自動(dòng)駕駛路線,摒棄了激光雷達(dá)和高精度地圖的使用。特斯拉通過其自研的攝像頭感知方案及數(shù)據(jù)驅(qū)動(dòng)的神經(jīng)網(wǎng)絡(luò),在自動(dòng)駕駛領(lǐng)域取得了巨大進(jìn)展。然而,純視覺方案在極端天氣及某些復(fù)雜場(chǎng)景下表現(xiàn)的局限性,依然是亟需解決的問題。
特斯拉智能駕駛的技術(shù)理念
1.1 純視覺自動(dòng)駕駛的核心理念
特斯拉在自動(dòng)駕駛領(lǐng)域的技術(shù)路線具有高度獨(dú)特性。不同于大多數(shù)車企采用的多傳感器融合方案,特斯拉選擇了純視覺感知的技術(shù)路徑,這意味著特斯拉的車輛完全依賴攝像頭進(jìn)行環(huán)境感知,而摒棄了常見的激光雷達(dá)和高精度地圖。這一決定源于特斯拉創(chuàng)始人埃隆·馬斯克的長(zhǎng)期信念:認(rèn)為攝像頭的視覺感知和數(shù)據(jù)處理能力足以替代激光雷達(dá)和其他傳感器,進(jìn)而實(shí)現(xiàn)車輛自動(dòng)駕駛。這一設(shè)計(jì)思路的基礎(chǔ)在于對(duì)人類視覺系統(tǒng)的模仿。人類駕駛員依靠眼睛和大腦對(duì)環(huán)境的感知與決策,特斯拉的純視覺方案試圖通過攝像頭和神經(jīng)網(wǎng)絡(luò)模擬這一過程。具體來說,特斯拉的車輛配備了8個(gè)攝像頭,這些攝像頭負(fù)責(zé)全方位監(jiān)測(cè)車輛周圍的環(huán)境,并通過神經(jīng)網(wǎng)絡(luò)生成三維環(huán)境模型。這些攝像頭分別覆蓋車輛的前方、后方及左右兩側(cè),并通過協(xié)作實(shí)時(shí)收集環(huán)境數(shù)據(jù),為自動(dòng)駕駛決策提供支持。與激光雷達(dá)依賴反射激光來構(gòu)建三維環(huán)境不同,特斯拉的攝像頭通過圖像處理技術(shù)生成3D場(chǎng)景,這種方法極大簡(jiǎn)化了傳感器融合的復(fù)雜性,同時(shí)降低了硬件成本。
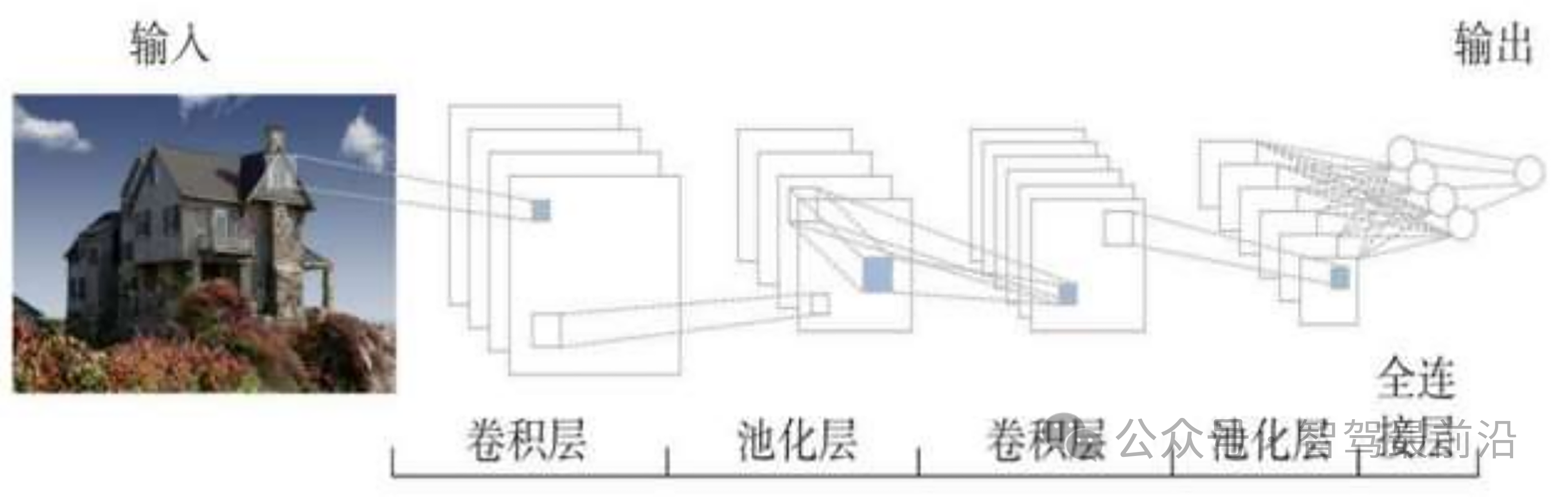
1.2 數(shù)據(jù)驅(qū)動(dòng)的神經(jīng)網(wǎng)絡(luò)
FSD系統(tǒng)的另一個(gè)核心競(jìng)爭(zhēng)力在于其強(qiáng)大的數(shù)據(jù)驅(qū)動(dòng)能力。特斯拉在全球范圍內(nèi)擁有龐大的用戶基礎(chǔ),這為其積累了大量的駕駛數(shù)據(jù)。自2020年FSD Beta版本在北美推出以來,特斯拉通過大量真實(shí)駕駛場(chǎng)景中的數(shù)據(jù)不斷優(yōu)化其神經(jīng)網(wǎng)絡(luò)模型。相比傳統(tǒng)的規(guī)則驅(qū)動(dòng)型自動(dòng)駕駛系統(tǒng),特斯拉采用了端到端的神經(jīng)網(wǎng)絡(luò)架構(gòu),通過大量數(shù)據(jù)訓(xùn)練模型來代替復(fù)雜的規(guī)則編寫,極大地提升了自動(dòng)駕駛系統(tǒng)在復(fù)雜場(chǎng)景下的適應(yīng)能力。特斯拉在感知層提出了“BEV+Transformer+Occupancy Network”的算法框架。通過這種框架,車輛可以以類似人類大腦的方式處理復(fù)雜環(huán)境中的信息。例如,F(xiàn)SD系統(tǒng)通過攝像頭收集圖像數(shù)據(jù),識(shí)別車輛、行人、道路標(biāo)志等元素,并使用深度學(xué)習(xí)算法構(gòu)建出周圍的三維場(chǎng)景。隨后,系統(tǒng)在神經(jīng)網(wǎng)絡(luò)中進(jìn)行處理,生成駕駛決策并執(zhí)行。這種數(shù)據(jù)驅(qū)動(dòng)的模型在面對(duì)不斷變化的環(huán)境時(shí)能夠更加靈活,且隨著數(shù)據(jù)量的增加,系統(tǒng)的性能和可靠性也會(huì)逐步提升。
1.3 自動(dòng)駕駛算法的演進(jìn)
特斯拉FSD算法的演進(jìn)是一個(gè)從規(guī)則驅(qū)動(dòng)向數(shù)據(jù)驅(qū)動(dòng)轉(zhuǎn)變的過程。早期的自動(dòng)駕駛系統(tǒng)依賴于大量的規(guī)則編寫和手工標(biāo)注來實(shí)現(xiàn)感知和決策,但這種方法的局限性在于無法有效應(yīng)對(duì)復(fù)雜多變的道路場(chǎng)景。特斯拉從2016年開始自研算法,通過不斷迭代,逐步引入更加先進(jìn)的神經(jīng)網(wǎng)絡(luò)架構(gòu)。2019年,特斯拉在其算法中引入了“BEV+Transformer”架構(gòu),通過將車輛周圍的2D圖像數(shù)據(jù)轉(zhuǎn)化為鳥瞰圖視角(BEV),并結(jié)合Transformer技術(shù)提升圖像升維處理的能力。這一架構(gòu)使得特斯拉FSD能夠更好地處理復(fù)雜環(huán)境中的物體識(shí)別和行為預(yù)測(cè),尤其在處理車輛交互、動(dòng)態(tài)障礙物等場(chǎng)景時(shí),表現(xiàn)出色。2024年,特斯拉推出了FSD V12版本,這一版本標(biāo)志著全球首個(gè)端到端神經(jīng)網(wǎng)絡(luò)量產(chǎn)上車。這意味著從數(shù)據(jù)輸入到?jīng)Q策輸出的整個(gè)過程都由神經(jīng)網(wǎng)絡(luò)完成,徹底擺脫了傳統(tǒng)的模塊化算法架構(gòu)。特斯拉通過這一革新,實(shí)現(xiàn)了從繁瑣的規(guī)則編寫到高效的數(shù)據(jù)驅(qū)動(dòng)的轉(zhuǎn)變,使得系統(tǒng)在處理復(fù)雜場(chǎng)景時(shí)更加靈活和準(zhǔn)確。
特斯拉自動(dòng)駕駛硬件的迭代發(fā)展
2.1 硬件架構(gòu)的演進(jìn):從HW1.0到HW4.0
特斯拉的自動(dòng)駕駛硬件平臺(tái)經(jīng)歷了多次迭代升級(jí),從2014年的HW1.0,特斯拉在每一代硬件的升級(jí)中,都顯著提升了計(jì)算能力、攝像頭的數(shù)量和系統(tǒng)的感知能力。這種硬件迭代與特斯拉的軟件發(fā)展同步進(jìn)行,推動(dòng)了FSD系統(tǒng)的不斷成熟。
? HW1.0階段(2014年):特斯拉最初的自動(dòng)駕駛硬件平臺(tái)基于Mobileye的EyeQ3芯片,主要功能是提供基礎(chǔ)的自動(dòng)駕駛輔助功能,包括自動(dòng)巡航和車道保持。HW1.0僅配備了1個(gè)前置攝像頭和毫米波雷達(dá),感知能力非常有限,主要依靠傳統(tǒng)的規(guī)則驅(qū)動(dòng)型算法處理環(huán)境數(shù)據(jù)。這一版本并不具備完全自動(dòng)駕駛的能力,更多是輔助駕駛。
? HW2.0階段(2016年):HW2.0的發(fā)布標(biāo)志著特斯拉自動(dòng)駕駛硬件邁入了一個(gè)全新的階段。特斯拉在這一階段引入了NVIDIA DRIVE PX2計(jì)算平臺(tái),支持更強(qiáng)大的數(shù)據(jù)處理和計(jì)算能力。車輛配備了8個(gè)攝像頭,包括前置、后置及側(cè)向攝像頭,覆蓋車輛周圍的所有方向。毫米波雷達(dá)仍然保留,用于提供額外的深度感知支持。這一版本的硬件升級(jí),使得特斯拉的車輛能夠處理更加復(fù)雜的自動(dòng)駕駛?cè)蝿?wù),如自動(dòng)變道和自動(dòng)泊車。
? HW3.0階段(2019年):特斯拉在HW3.0階段推出了自研FSD芯片,徹底擺脫了對(duì)NVIDIA芯片的依賴。FSD芯片具備每秒2300幀的圖像處理能力,大幅提升了系統(tǒng)的計(jì)算能力。HW3.0配備了8個(gè)攝像頭和12個(gè)超聲波雷達(dá),確保車輛可以全方位監(jiān)測(cè)周圍環(huán)境,同時(shí)提高了感知的精確度。得益于自研芯片,特斯拉能夠更加靈活地在硬件上部署其神經(jīng)網(wǎng)絡(luò)算法,使得FSD系統(tǒng)能夠在硬件上實(shí)現(xiàn)高度優(yōu)化。
? HW4.0階段(2023年):HW4.0是特斯拉最新的自動(dòng)駕駛硬件版本,這一版本延續(xù)了純視覺方案的核心理念,同時(shí)進(jìn)一步增強(qiáng)了攝像頭的感知能力。HW4.0配備了12個(gè)攝像頭,像素從120萬提升至500萬,攝像頭的探測(cè)距離達(dá)到424米。此外,特斯拉重新引入了高精度4D毫米波雷達(dá),以彌補(bǔ)純視覺方案在極端天氣或復(fù)雜光照條件下的局限性。HW4.0的處理器也得到了大幅升級(jí),CPU內(nèi)核從12個(gè)增加至20個(gè),使得系統(tǒng)具備更強(qiáng)的計(jì)算能力,能夠應(yīng)對(duì)更加復(fù)雜的駕駛場(chǎng)景。
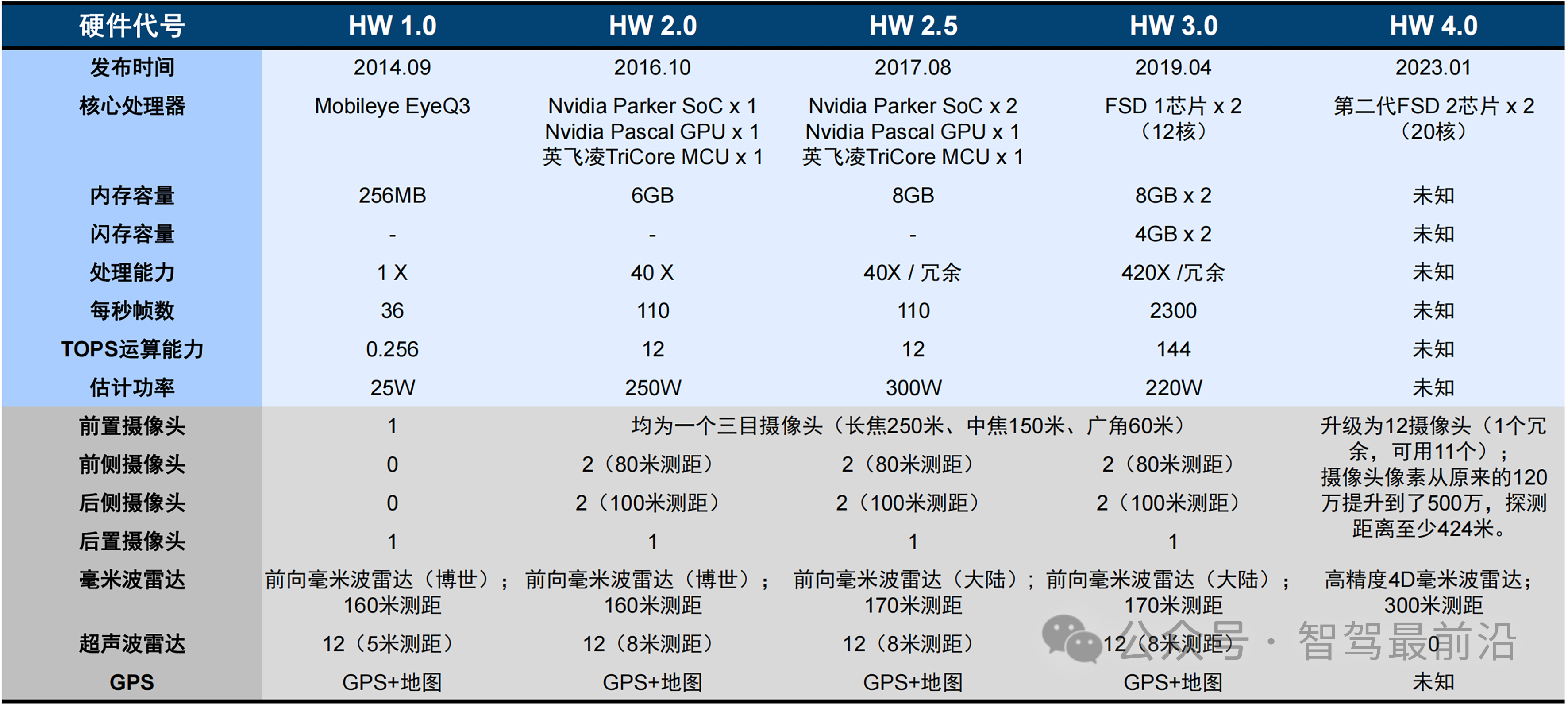
特斯拉FSD硬件端迭代歷程,源自:華金證券
2.2 硬件優(yōu)化的策略:以攝像頭為核心,減少冗余傳感器
在硬件架構(gòu)的演進(jìn)過程中,特斯拉采取了一種獨(dú)特的“減法”策略,即逐步減少對(duì)其他冗余傳感器的依賴,最終完全依賴攝像頭來完成自動(dòng)駕駛的環(huán)境感知任務(wù)。特斯拉在HW3.0階段曾分批移除不同車型裝配的毫米波雷達(dá),認(rèn)為攝像頭加上數(shù)據(jù)驅(qū)動(dòng)的算法足以應(yīng)對(duì)大多數(shù)駕駛場(chǎng)景。然而,隨著技術(shù)發(fā)展和用戶反饋,特斯拉在HW4.0階段重新引入了4D毫米波雷達(dá),尤其是在惡劣天氣下提升系統(tǒng)的感知能力。相比于激光雷達(dá)等高成本的傳感器,攝像頭的成本更低,且更容易與現(xiàn)有的神經(jīng)網(wǎng)絡(luò)算法結(jié)合。激光雷達(dá)的高精度固然能夠提供更豐富的環(huán)境感知數(shù)據(jù),但其價(jià)格昂貴,動(dòng)輒數(shù)千美元的硬件成本使得激光雷達(dá)不適合大規(guī)模量產(chǎn)車型。而攝像頭的成本則大大低于激光雷達(dá)。例如,HW4.0中12顆攝像頭的硬件成本約為3600元人民幣,4D毫米波雷達(dá)的成本在500-600元之間,相比于激光雷達(dá)的高成本,特斯拉的純視覺方案在大幅降低成本的同時(shí),仍然能夠提供足夠的環(huán)境感知能力。特斯拉這種“減法”策略的成功與其強(qiáng)大的算法密切相關(guān)。通過對(duì)攝像頭采集的數(shù)據(jù)進(jìn)行深度處理,特斯拉的神經(jīng)網(wǎng)絡(luò)能夠?qū)崿F(xiàn)對(duì)環(huán)境的精準(zhǔn)理解,并作出相應(yīng)的駕駛決策。這種純視覺方案不僅降低了硬件成本,還簡(jiǎn)化了系統(tǒng)的復(fù)雜性,使得FSD具備更高的市場(chǎng)競(jìng)爭(zhēng)力。
2.3 硬件的自研優(yōu)勢(shì)
自從HW3.0開始,特斯拉開始研發(fā)自有的FSD芯片。這一舉措為特斯拉帶來了顯著的競(jìng)爭(zhēng)優(yōu)勢(shì)。相比于依賴外部供應(yīng)商的芯片,特斯拉自研的FSD芯片能夠更好地與其算法進(jìn)行適配,并在處理性能上進(jìn)行專門的優(yōu)化。這使得特斯拉的硬件架構(gòu)不僅在計(jì)算能力上更加出色,還在成本控制上擁有更強(qiáng)的優(yōu)勢(shì)。自研芯片的一個(gè)重要優(yōu)勢(shì)在于它為特斯拉的硬件開發(fā)帶來了更高的靈活性。特斯拉可以根據(jù)其自動(dòng)駕駛系統(tǒng)的具體需求,靈活調(diào)整芯片的設(shè)計(jì)和功能。這種靈活性不僅使得硬件能夠更加高效地運(yùn)行特斯拉的神經(jīng)網(wǎng)絡(luò)算法,還大大提高了系統(tǒng)的性價(jià)比。此外,隨著特斯拉在自動(dòng)駕駛領(lǐng)域積累越來越多的數(shù)據(jù),自研硬件的價(jià)值將進(jìn)一步凸顯,因?yàn)樘厮估梢栽谛酒瑢用嫔蠈?duì)算法和硬件進(jìn)行同步優(yōu)化,進(jìn)而提升FSD的整體性能。
特斯拉自動(dòng)駕駛系統(tǒng)的實(shí)際表現(xiàn)
3.1 FSD駕駛決策的擬人化表現(xiàn)
特斯拉FSD的一個(gè)顯著特點(diǎn)是其高度擬人化的駕駛決策。這一特性在最新的FSD V12版本中得到了進(jìn)一步提升。FSD系統(tǒng)通過大量的道路行駛數(shù)據(jù)學(xué)習(xí)人類駕駛員的行為,并在復(fù)雜駕駛場(chǎng)景下模仿人類駕駛員的決策方式。與之前的版本相比,F(xiàn)SD V12在速度控制、轉(zhuǎn)向平滑度以及對(duì)突發(fā)情況的應(yīng)對(duì)方面,都更加接近人類駕駛員。例如,F(xiàn)SD V12在紅綠燈啟停、轉(zhuǎn)向和變道過程中,能夠做到更加平穩(wěn)的駕駛,極大地減少了乘客在這些操作中的頓挫感。同時(shí),系統(tǒng)在遇到前方緩慢行駛的車輛時(shí),能夠迅速判斷是否變道超車,并采取合理的速度進(jìn)行變道。特斯拉通過深度學(xué)習(xí)和端到端的神經(jīng)網(wǎng)絡(luò)訓(xùn)練,使得FSD在復(fù)雜道路場(chǎng)景中的決策能力得到了顯著提升。此外,F(xiàn)SD系統(tǒng)在處理與其他交通參與者的互動(dòng)時(shí)也表現(xiàn)出色。比如,系統(tǒng)在面對(duì)行人橫穿馬路時(shí),能夠迅速減速并留出足夠的安全距離,隨后在行人通過后繼續(xù)加速前進(jìn)。這種類似人類駕駛員的反應(yīng),使得FSD的駕駛表現(xiàn)更加擬人化,提升了乘客的乘坐體驗(yàn)。
3.2 安全性與可靠性
特斯拉FSD在安全性方面的表現(xiàn)尤為突出。根據(jù)特斯拉發(fā)布的安全數(shù)據(jù),F(xiàn)SD在開啟后的行車安全性顯著高于傳統(tǒng)駕駛模式。特斯拉的數(shù)據(jù)顯示,在開啟FSD功能的情況下,每行駛539萬英里才可能發(fā)生一起事故,而全美平均水平是每行駛67萬英里發(fā)生一起事故。這表明FSD系統(tǒng)能夠顯著減少駕駛過程中的潛在風(fēng)險(xiǎn),提高行車安全性。此外,F(xiàn)SD系統(tǒng)的可靠性也在不斷提升。特斯拉的最新版本FSD V12在城市環(huán)境中的無接管行駛里程已經(jīng)達(dá)到622公里,較之前的版本大幅提升。這意味著,在大多數(shù)日常駕駛場(chǎng)景中,車輛可以依靠FSD系統(tǒng)自主完成駕駛?cè)蝿?wù),而無需駕駛員頻繁干預(yù)。這一進(jìn)展顯示出特斯拉自動(dòng)駕駛技術(shù)在城市道路環(huán)境中的適應(yīng)性和可靠性正在逐步提高。
3.3 純視覺方案的局限性
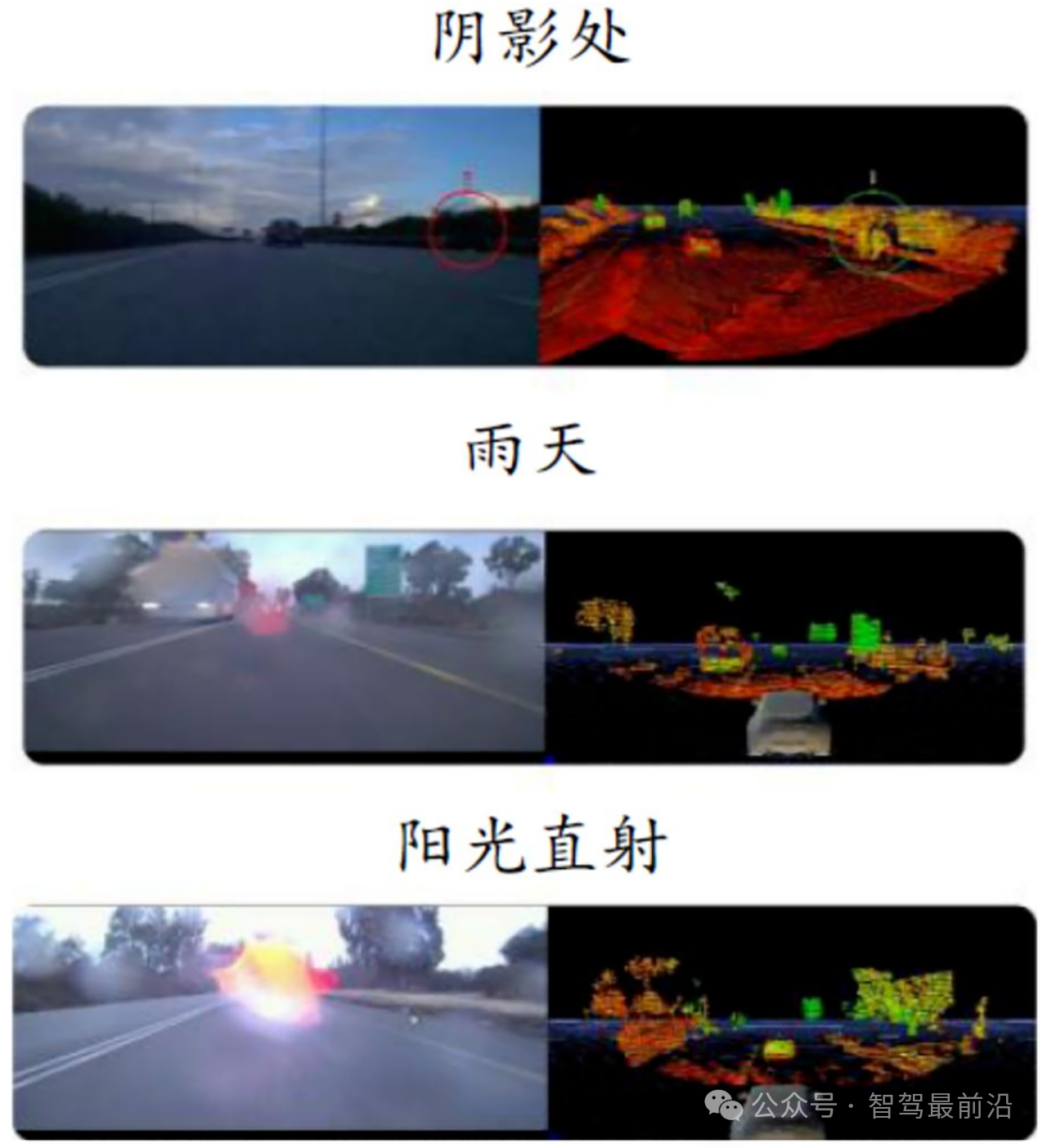
盡管特斯拉的純視覺方案在多數(shù)場(chǎng)景下表現(xiàn)優(yōu)異,但在一些極端天氣或光線條件較差的情況下,攝像頭的表現(xiàn)仍存在一定的局限性。例如,在夜間駕駛或大霧天氣下,攝像頭的感知能力會(huì)受到限制,導(dǎo)致系統(tǒng)無法準(zhǔn)確判斷環(huán)境中的物體。這種局限性是特斯拉重新引入毫米波雷達(dá)的原因之一,尤其是在HW4.0階段,特斯拉通過高精度4D毫米波雷達(dá)彌補(bǔ)了攝像頭在這些場(chǎng)景下的不足。
此外,特斯拉FSD在面對(duì)某些長(zhǎng)尾場(chǎng)景(例如非常規(guī)或極端駕駛情況)時(shí),系統(tǒng)仍可能出現(xiàn)誤判。例如,在遇到特殊形狀或裝載過多物品的車輛時(shí),F(xiàn)SD系統(tǒng)可能無法準(zhǔn)確識(shí)別這些車輛的形狀,進(jìn)而導(dǎo)致錯(cuò)誤的駕駛決策。這些長(zhǎng)尾場(chǎng)景雖然在實(shí)際駕駛中并不常見,但如果不能有效應(yīng)對(duì),仍可能對(duì)駕駛安全性產(chǎn)生影響。
特斯拉FSD在中國(guó)市場(chǎng)的應(yīng)用與挑戰(zhàn)
4.1 中國(guó)市場(chǎng)的機(jī)遇與挑戰(zhàn)
中國(guó)作為全球最大的新能源汽車市場(chǎng),對(duì)于特斯拉FSD而言,是一個(gè)至關(guān)重要的戰(zhàn)略市場(chǎng)。特斯拉自進(jìn)入中國(guó)以來,通過其高性能的電動(dòng)車和先進(jìn)的自動(dòng)駕駛技術(shù),贏得了大量消費(fèi)者的青睞。數(shù)據(jù)顯示,截止2023年底,特斯拉在中國(guó)市場(chǎng)的累計(jì)銷量已經(jīng)超過170萬輛,這為FSD的推廣奠定了廣泛的用戶基礎(chǔ)。然而,特斯拉在中國(guó)市場(chǎng)推廣FSD也面臨一些獨(dú)特的挑戰(zhàn)。首先,中國(guó)的監(jiān)管環(huán)境相對(duì)復(fù)雜,特別是在高精度地圖和數(shù)據(jù)安全方面,中國(guó)政府對(duì)自動(dòng)駕駛技術(shù)的要求非常嚴(yán)格。特斯拉需要與中國(guó)的本土企業(yè)合作,確保其自動(dòng)駕駛系統(tǒng)符合中國(guó)的法規(guī)要求。為此,特斯拉已經(jīng)與百度合作,獲得了車道級(jí)的導(dǎo)航地圖,以支持其FSD在中國(guó)的落地。此外,特斯拉計(jì)劃在中國(guó)建立本地的數(shù)據(jù)中心,確保所有車輛數(shù)據(jù)能夠在中國(guó)境內(nèi)進(jìn)行存儲(chǔ)和處理,以符合中國(guó)的數(shù)據(jù)安全政策。
4.2 市場(chǎng)滲透與潛在收益
盡管面臨挑戰(zhàn),特斯拉在中國(guó)市場(chǎng)的前景依然十分廣闊。假設(shè)FSD在中國(guó)市場(chǎng)的滲透率達(dá)到5%,特斯拉將在中國(guó)市場(chǎng)新增54.4億元的收入。特斯拉通過廣泛的用戶基礎(chǔ)和不斷優(yōu)化的自動(dòng)駕駛技術(shù),有望在中國(guó)市場(chǎng)實(shí)現(xiàn)可觀的增長(zhǎng)。為了加速FSD在中國(guó)市場(chǎng)的推廣,特斯拉已經(jīng)推出了EAP(增強(qiáng)版自動(dòng)駕駛)的訂閱服務(wù),用戶可以按月或按季度支付費(fèi)用使用部分高級(jí)自動(dòng)駕駛功能。這一靈活的訂閱模式不僅增加了現(xiàn)有用戶對(duì)自動(dòng)駕駛功能的接受度,還為未來FSD在中國(guó)市場(chǎng)的全面推廣奠定了基礎(chǔ)。
未來展望:特斯拉FSD的技術(shù)趨勢(shì)與市場(chǎng)競(jìng)爭(zhēng)
5.1 技術(shù)趨勢(shì):從視覺感知到全場(chǎng)景自動(dòng)駕駛
未來,特斯拉將繼續(xù)深化其純視覺技術(shù)路線,同時(shí)通過硬件和軟件的持續(xù)優(yōu)化,進(jìn)一步提升FSD系統(tǒng)的性能。特斯拉在算法層面將繼續(xù)推進(jìn)端到端神經(jīng)網(wǎng)絡(luò)的應(yīng)用,減少對(duì)傳統(tǒng)規(guī)則編寫的依賴。隨著數(shù)據(jù)量的增加,F(xiàn)SD系統(tǒng)將逐步在更復(fù)雜的駕駛場(chǎng)景中實(shí)現(xiàn)擬人化決策,最終實(shí)現(xiàn)全場(chǎng)景自動(dòng)駕駛。在硬件方面,特斯拉可能會(huì)繼續(xù)優(yōu)化其攝像頭和雷達(dá)的組合,通過提升攝像頭的分辨率和感知范圍,以及引入更多的高精度傳感器,進(jìn)一步提升系統(tǒng)在極端場(chǎng)景中的表現(xiàn)能力。同時(shí),特斯拉的自研芯片將繼續(xù)在硬件層面上為FSD的算法提供強(qiáng)大的計(jì)算能力支持,確保系統(tǒng)能夠?qū)崟r(shí)處理大量數(shù)據(jù)并作出精確決策。
5.2 市場(chǎng)競(jìng)爭(zhēng):全球與中國(guó)的雙重挑戰(zhàn)
雖然特斯拉在全球范圍內(nèi)的自動(dòng)駕駛技術(shù)處于領(lǐng)先地位,但其面臨的市場(chǎng)競(jìng)爭(zhēng)壓力正在不斷加大。國(guó)內(nèi)外的汽車制造商和科技公司都在積極布局自動(dòng)駕駛技術(shù)。例如,國(guó)內(nèi)的蔚來、小鵬和理想等新興車企已經(jīng)在智能駕駛領(lǐng)域取得了顯著進(jìn)展,并在某些場(chǎng)景下與特斯拉展開了激烈競(jìng)爭(zhēng)。在中國(guó)市場(chǎng),特斯拉需要面對(duì)本土車企的強(qiáng)勁競(jìng)爭(zhēng),同時(shí)還需要適應(yīng)中國(guó)市場(chǎng)的獨(dú)特法規(guī)要求。為了保持競(jìng)爭(zhēng)優(yōu)勢(shì),特斯拉需要在技術(shù)上不斷創(chuàng)新,同時(shí)通過本地化的戰(zhàn)略適應(yīng)中國(guó)市場(chǎng)的需求。此外,特斯拉還需加速自動(dòng)駕駛技術(shù)的商業(yè)化進(jìn)程,例如推出機(jī)器人出租車服務(wù)等新業(yè)務(wù),以應(yīng)對(duì)市場(chǎng)的多元化需求。
結(jié)語
特斯拉FSD方案通過其獨(dú)特的純視覺技術(shù)路線、數(shù)據(jù)驅(qū)動(dòng)的端到端神經(jīng)網(wǎng)絡(luò),以及自研硬件的優(yōu)勢(shì),奠定了其在全球自動(dòng)駕駛領(lǐng)域的領(lǐng)先地位。盡管其技術(shù)在許多方面表現(xiàn)出色,但在面對(duì)復(fù)雜的市場(chǎng)需求和嚴(yán)苛的監(jiān)管環(huán)境時(shí),特斯拉仍需繼續(xù)優(yōu)化其系統(tǒng)性能,以確保在未來的市場(chǎng)競(jìng)爭(zhēng)中繼續(xù)保持領(lǐng)先。同時(shí),隨著全球自動(dòng)駕駛技術(shù)的快速發(fā)展,特斯拉能否在中國(guó)等重要市場(chǎng)順利推廣其FSD技術(shù),將是決定其未來市場(chǎng)地位的重要因素。?
參考文獻(xiàn):
華金證券:特斯拉智能駕駛方案簡(jiǎn)剖
「智駕最前沿」微信公眾號(hào)后臺(tái)回復(fù):C-0470,獲取:特斯拉智能駕駛方案簡(jiǎn)剖 pdf下載方式。
-
特斯拉
+關(guān)注
關(guān)注
66文章
6378瀏覽量
129199 -
智能駕駛
+關(guān)注
關(guān)注
4文章
2816瀏覽量
49994 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
790文章
14326瀏覽量
170743 -
FSD
+關(guān)注
關(guān)注
0文章
105瀏覽量
6744
發(fā)布評(píng)論請(qǐng)先 登錄
人工智能技術(shù)的現(xiàn)狀與未來發(fā)展趨勢(shì)

端到端智駕HiL面臨哪些挑戰(zhàn)?# 仿真測(cè)試# 智能駕駛# 端到端# 科技# 技術(shù)# 趨勢(shì)# 汽車# HiL
從游戲到智能駕駛,英偉達(dá)有哪些技術(shù)升級(jí)?
紅外熱成像技術(shù)推動(dòng)機(jī)器視覺向智能化、精準(zhǔn)化發(fā)展
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
馬斯克重申:純視覺是自動(dòng)駕駛的未來
從特斯拉看智能駕駛未來發(fā)展
特斯拉FSD,從全棧自研到智能駕駛的未來

智能駕駛的未來發(fā)展方向
智能駕駛的挑戰(zhàn)與機(jī)遇
如何利用FPGA技術(shù)革新視覺人工智能應(yīng)用?

中國(guó)電動(dòng)車企競(jìng)相角逐自動(dòng)駕駛領(lǐng)域,向特斯拉發(fā)起技術(shù)挑戰(zhàn)
華為智能駕駛發(fā)展路徑探討

自動(dòng)駕駛的未來之路:智能網(wǎng)聯(lián)與單車智能的交融
智能駕駛時(shí)代下的EMC挑戰(zhàn)與防護(hù)策略





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論