 從特斯拉看智能駕駛未來發展
從特斯拉看智能駕駛未來發展
編者語:「智駕最前沿」微信公眾號后臺回復:C-0587,獲取本文參考報告:《從特斯拉視角,看智能駕駛研究框架》pdf下載方式。
隨著自動駕駛技術的快速發展,智能駕駛已成為汽車行業技術競爭的焦點。特斯拉作為該領域的先行者,通過對算法、硬件、數據閉環和市場戰略的深度布局,為自動駕駛行業的發展提供了重要借鑒。
特斯拉智能駕駛歷史復盤
1.1 智能駕駛的起步:從模塊化規則驅動到端到端算法
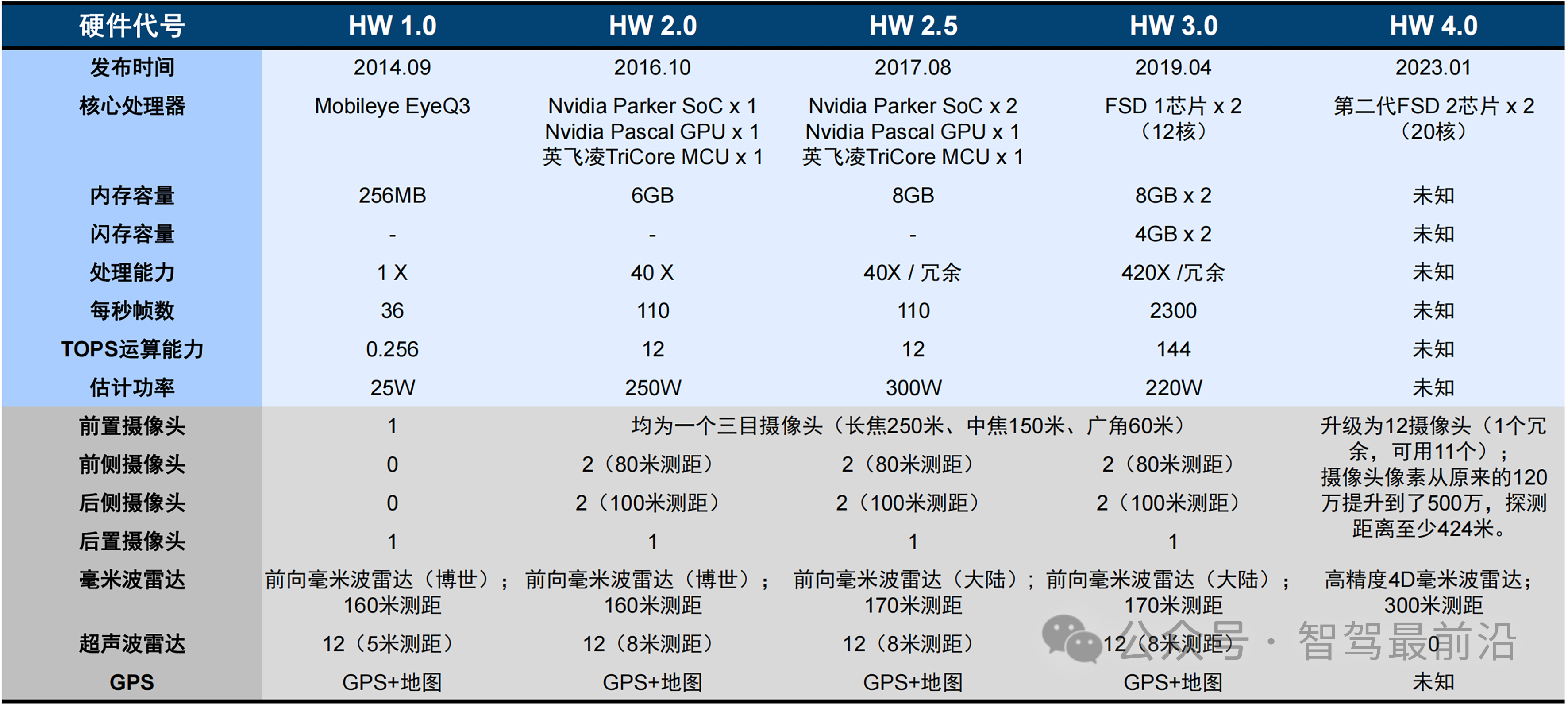
特斯拉智能駕駛的技術進化過程早在2014年就已開始。彼時,特斯拉與Mobileye合作,將其EyeQ3芯片引入智能駕駛系統,為其自動駕駛奠定了初步的基礎。Mobileye基于規則的算法在單目相機下進行車距測量,通過圖像中的物體像素高度和相機焦距估算距離,實現了早期車距監測的功能。然而,這一方法在路況變化、復雜障礙物識別上存在較大局限。例如,在2016年特斯拉發生的致命事故中,由于Mobileye的規則驅動系統無法識別拖掛白色貨車與天空背景的差異,導致了致命誤判 。這一事件凸顯了規則驅動方法在高度不確定的駕駛環境中的局限性。傳統的模塊化方法在開發時依賴于人工定義的規則,因此在處理未見過的復雜路況時,系統的識別和判斷能力會出現嚴重偏差。Mobileye提供的算法本質上是一個封閉的黑盒,難以靈活更新和改進;這也直接促使特斯拉在2017年轉向自研端到端的感知系統,依托:Transformer+BEV + Occuopancy的主流架構,逐步實現了感知側的全面進化。特斯拉意識到,如果智能駕駛技術要實現普及和安全保障,必須打破傳統的規則驅動模式,實現以深度學習算法為核心的端到端控制系統,從而為系統提供更強的學習和泛化能力。
1.2 端到端算法的引入:感知側的轉型
端到端算法的核心在于用深度神經網絡替代傳統的模塊化方法,實現從傳感器輸入到車輛控制的直接映射。2017年,特斯拉正式引入卷積神經網絡(CNN)并開始構建以端到端算法為核心的智能駕駛感知系統。在此過程中,特斯拉聘請了在深度學習領域頗具影響力的Andrej Karpathy,并提出了“Software 2.0”的概念。與傳統的由專家定義特征和規則的“Software 1.0”不同,“Software 2.0”強調用數據和神經網絡自動提取特征,實現感知、決策和控制的自動化。Karpathy在加入特斯拉后,利用CNN模型設計了能夠自主學習和理解環境特征的系統,推動智能駕駛從模塊化設計轉向了端到端結構。這一技術演進在特斯拉的智能駕駛系統中最為典型的應用就是BEV+Transformer架構。BEV技術提供了車輛周圍環境的全局視角,將多個攝像頭拍攝的2D圖像合成為3D空間圖像,從而幫助系統更準確地識別周圍環境中的障礙物和行駛路線 。通過引入自注意力機制的Transformer模型,特斯拉的感知系統可以從局部像素特征提取中解放出來,基于全局數據進行更為高效的環境感知處理,大大提升了智能駕駛系統的準確性和穩定性。
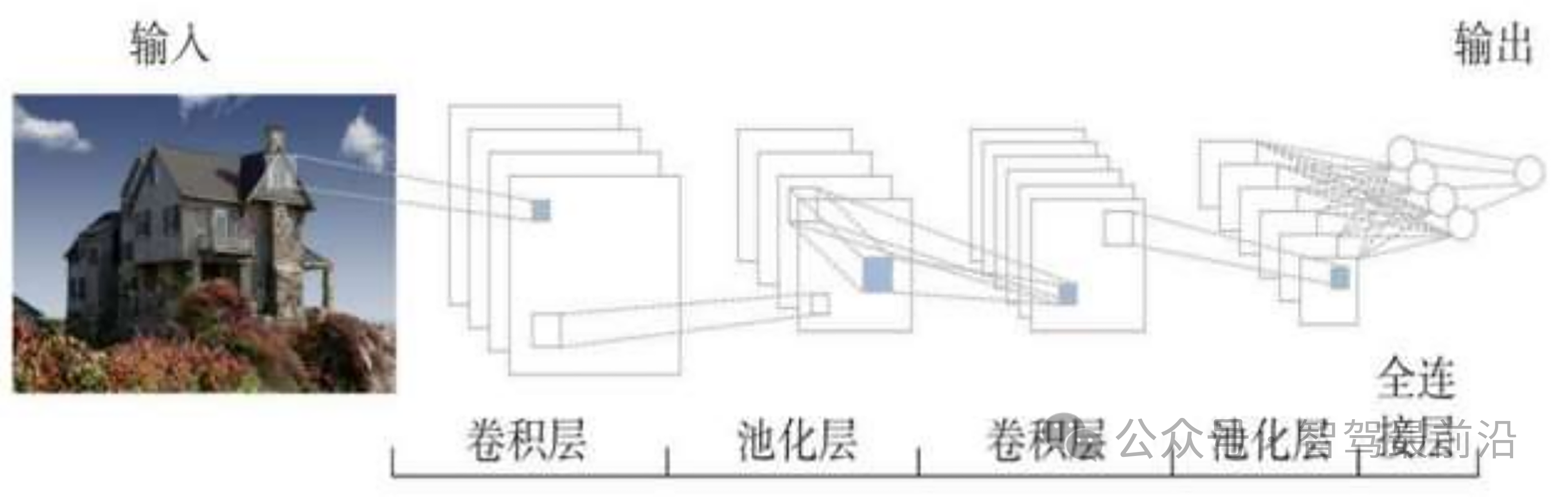
CNN工作過程示意圖
1.3 感知側端到端算法的實現:從BEV到Occupancy網絡
BEV和Transformer的結合顯著增強了特斯拉系統的環境感知能力。然而,智能駕駛環境的復雜性要求系統具備更高的適應性和泛化能力。特斯拉進一步提出Occupancy網絡,將BEV從二維擴:數據閉環的關鍵提升在數據閉環的過程中,數據標注的準確性和高效性對算法性能至關重要。特斯拉從2019年開始逐步建設自有標注團隊,將傳統的2D人工標注拓展到4D自動標注系統。4D自動標注系統能夠在空間和時間維度上對數據進行動態標注,涵蓋深度、速度和加速度等信息,使系統能夠更加精準地分析和理解駕駛環境。傳統的人工標注不僅成本高、速度慢,還易受人為主觀因素影響,而4D自動標注系統則能夠大幅提升標注速度和一致性,使得大量數據能夠快速投入訓練,極大縮短了系統優化的周期。
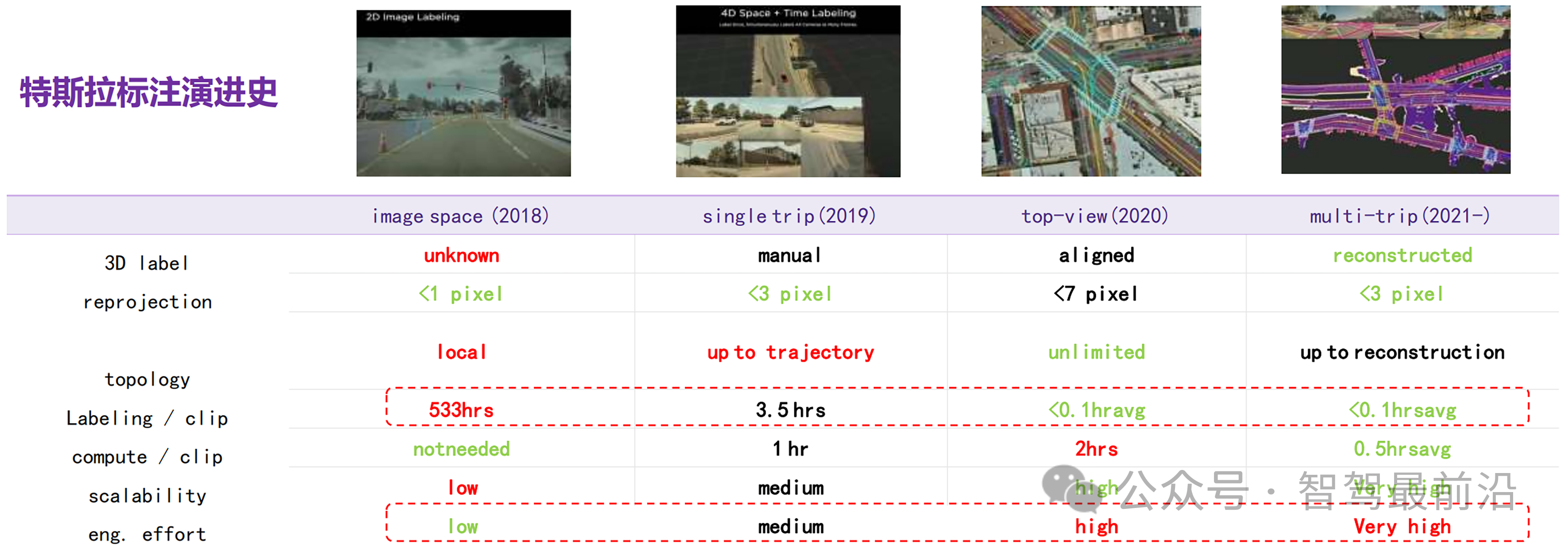
特斯拉標注演進史
特斯拉的4D自動標注系統能夠替代近500萬小時的人工標注作業量,通過計算機視覺和神經網絡技術自動識別圖像中的場景特征,并在標注數據時糾正細微錯誤,使得數據標注更加精確。由于自動標注系統的效率顯著高于人工操作,特斯拉能夠在更短的時間內獲得更大規模的數據集,進一步提升系統的泛化能力。這種自動化數據標注技術也為特斯拉的數據閉環帶來了質的飛躍,使其能夠以更快的速度進行算法迭代,從而保持在行業中的技術領先地位。
1.4 自研Dojo算力中心:支撐閉環的核心硬件
在數據閉環的實現過程中,計算能力是支撐大規模數據處理和模型訓練的基礎。為此,特斯拉投入巨資自研了Dojo超級計算機,并在2021年推出D1芯片。Dojo不僅是一個算力中心,更是特斯拉數據驅動體系的核心支撐。與傳統的GPU架構相比,Dojo系統以更高的性能和效率進行專門優化,特別是面向特斯拉的自動駕駛任務,Dojo能夠在自動標注、占用網絡等核心任務中實現比標準GPU高3-4倍的計算效率。
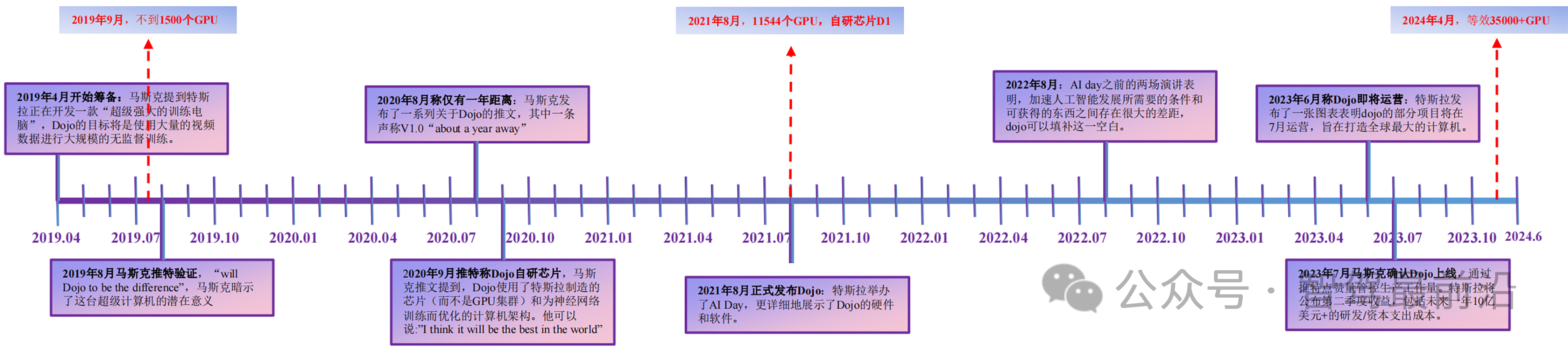
特斯拉Dojo歷史進展梳理
Dojo的核心在于其高帶寬和低延遲的訓練體系。如每個D1芯片配有高達645mm2的晶體管集成面積,并擁有高達362 TFLOPS的算力,這使得特斯拉能夠在短時間內完成大規模神經網絡的訓練。通過Dojo,特斯拉可以在更短的時間內完成數億幀視頻數據的訓練和迭代,從而極大提升了數據閉環的整體效率。Dojo不僅是特斯拉數據閉環體系的計算支柱,更是其保持技術領先的關鍵要素之一。特斯拉在2024年預計將Dojo的算力擴展至100 Exa-FLOPS,這將使其在智能駕駛領域的算力儲備遠超同業,為未來的算法優化和大模型訓練提供充足的算力保障 。
特斯拉智能駕駛未來研判框架
2.1 算法收斂:感知和規控側的大模型趨勢
特斯拉在感知側的端到端算法和規控側的端到端控制系統推動了智能駕駛算法的逐步收斂趨勢。2021年特斯拉推出BEV+Transformer架構,2022年又將Occupancy網絡引入感知系統。通過對數據的全局感知,Transformer架構為系統提供了強大的特征提取和環境理解能力,大幅提升了智能駕駛的環境識別準確度。在規控側,通過神經網絡結合蒙特卡羅樹算法,特斯拉實現了對路徑規劃的端到端控制,使得系統在復雜環境中具備更高的決策效率。從當前的行業發展來看,智能駕駛算法正在逐步向大模型方向發展。隨著計算資源的增加和數據規模的擴大,感知和規控側的算法模型將逐步從規則驅動走向數據驅動的深度學習模式。大模型的優勢在于可以通過跨領域的知識和數據融合,提高系統在不同場景中的識別和決策能力。大模型帶來的性能躍升也促使特斯拉在硬件層面加大了Dojo的算力投入,以支撐其智能駕駛“GPT時刻”的到來,即通過規模化訓練獲得顯著的性能提升。特斯拉的Dojo計算能力將在2024年實現進一步擴展,為大規模端到端智能駕駛模型提供支持,從而加速其自動駕駛系統的全面升級。
2.2 數據競賽與閉環優化:未來的核心競爭力
數據是智能駕駛系統性能提升的關鍵。特斯拉通過龐大的車隊積累和仿真模擬,構建了行業領先的數據閉環體系,為其智能駕駛系統提供了源源不斷的高質量數據。在自動駕駛的未來競爭中,數據閉環的建設將成為車企的重要競爭力之一。特斯拉的閉環數據體系不僅包含實際路況數據,還涵蓋了影子模式挖掘的長尾場景、仿真模擬的數據補充和自動標注的高效處理。未來的數據競賽將聚焦于如何更快地獲取和處理大量高質量數據。特斯拉通過推出FSD V12進一步提升了智能駕駛的滲透率,并以低價策略鼓勵用戶生成更多駕駛數據。此外,特斯拉還通過獎勵積分等手段激勵用戶在不同駕駛場景中使用智能駕駛功能,從而為系統帶來更多的訓練數據。隨著特斯拉總FSD行駛里程在2024年預計突破17億英里,其數據閉環體系的優勢將進一步凸顯,使其在行業競爭中處于領先地位。
2.3 任務導向與分步端到端:智能駕駛的未來路徑
隨著智能駕駛技術的不斷進步,任務導向和分步端到端將成為未來智能駕駛發展的重要趨勢。在大模型的支撐下,智能駕駛系統能夠根據特定任務定向優化系統性能,從而滿足不同駕駛場景的需求。特斯拉在2023年推出的端到端智能駕駛任務分步模塊,將其智能駕駛功能細化到停車、泊車和路徑規劃等不同任務中,并通過分步迭代的方式持續優化。

智能駕駛端到端設計理念
例如,在智能泊車場景中,特斯拉基于端到端大模型,通過統一的感知、決策和控制體系,將泊車過程中的感知、路徑規劃和停車控制多合一,實現對車位的精準定位和自動泊車操作。小米在其代客泊車場景中也采用了類似的端到端模型,這一模式通過大規模學習和推演,不斷提升泊車準確度和操作流暢性。通過任務導向的細分,特斯拉不僅可以進一步提升用戶體驗,還能夠在不同場景下提供更高效的解決方案。
特斯拉視角的市場應用與未來戰略
3.1 智能駕駛的市場化挑戰:法規與成本
盡管特斯拉在智能駕駛技術上取得了顯著進展,但在實際市場推廣中依然面臨法規和成本的多重挑戰。首先,智能駕駛的廣泛應用要求法律體系的配套完善。目前各國在智能駕駛的安全標準、事故歸責、數據隱私等方面尚未形成統一標準,特斯拉在全球范圍內的推廣因此受到限制。尤其在中國市場,特斯拉需要滿足數據合規和本地化要求,為此投入了大量資源以確保FSD系統的順利落地。此外,智能駕駛系統的高成本也是制約市場化推廣的一個因素。特斯拉通過FSD芯片自研降低了硬件成本,但系統的整體成本仍然較高。特斯拉采用了“訂閱+買斷”相結合的模式,使得更多消費者能夠以較低的成本體驗到智能駕駛功能。通過逐步降低FSD的訂閱和買斷價格,特斯拉有效提升了市場滲透率。隨著硬件成本的進一步下降,特斯拉的智能駕駛系統將逐步擴展到更多的車型中,推動智能駕駛的普及。
3.2 技術展望:從軟件定義汽車到數據驅動汽車
隨著智能駕駛系統的日益成熟,汽車正從傳統的硬件產品轉向數據驅動的智能產品。特斯拉的智能駕駛系統以數據為核心,以自研計算平臺Dojo為支撐,使其具備了高效的數據閉環迭代能力。未來,智能駕駛技術的發展將進一步加速汽車從“軟件定義”到“數據驅動”的轉變。特斯拉通過大規模的數據積累和自主研發,正在推動這一變革,并已率先進入智能駕駛的深水區。在這一趨勢下,數據隱私和安全將成為未來發展的關鍵問題。特斯拉在實現智能駕駛系統的全球擴展過程中,需要在保證數據合規和隱私保護的前提下進行數據處理和跨境傳輸。為此,特斯拉不斷加強數據安全措施,以應對復雜的數據監管環境。未來隨著數據驅動汽車的普及,如何在合規的前提下高效利用數據將成為每個車企面臨的共同挑戰。
結論
特斯拉智能駕駛系統的發展路徑顯示了自動駕駛技術的核心趨勢,即從模塊化走向端到端,從規則驅動轉向數據驅動。通過對算法、數據和硬件的綜合布局,特斯拉在智能駕駛領域取得了顯著突破。未來,隨著智能駕駛技術的進一步成熟和數據閉環的完善,智能駕駛的普及將成為大勢所趨。然而,法規的完善、成本的下降和數據隱私保護將是智能駕駛廣泛應用的關鍵所在。特斯拉在智能駕駛上的成功經驗為行業提供了寶貴的參考。隨著技術的不斷發展,自動駕駛市場競爭將更加激烈,數據驅動的閉環體系和高效計算平臺將成為車企在未來競爭中的重要武器。在未來的智能駕駛市場中,特斯拉的技術創新和戰略布局將繼續引領行業的發展方向。
審核編輯 黃宇
-
特斯拉
+關注
關注
66文章
6372瀏覽量
128736 -
智能駕駛
+關注
關注
4文章
2789瀏覽量
49774
發布評論請先 登錄
特斯拉智能駕駛|從視覺優先的技術路徑到未來的挑戰?
從發展智能電網面臨的問題看智能電表環境
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
訊 > 特斯拉或將采用無線熱點及動態環視設備 特斯拉或將采用無線熱點及動態環視設備
淺析自動駕駛發展趨勢,激光雷達是未來?
無人駕駛與自動駕駛的差別性
ADAS的發展給駕駛員駕駛視野的改變
特斯拉FSD,從全棧自研到智能駕駛的未來






 工商網監
工商網監
評論