") 物聯(lián)網(wǎng)行業(yè)中的電機(jī)家族成員解密(四)_舵機(jī)篇
物聯(lián)網(wǎng)行業(yè)中的電機(jī)家族成員解密(四)_舵機(jī)篇

物聯(lián)網(wǎng)系統(tǒng)中為什么要使用電機(jī)
物聯(lián)網(wǎng)系統(tǒng)中使用電機(jī)可以提高設(shè)備的智能化水平,實(shí)現(xiàn)遠(yuǎn)程控制、自動化控制、故障診斷、預(yù)測維護(hù)等功能,從而提高生產(chǎn)效率、降低維護(hù)成本、提高生活質(zhì)量。
物聯(lián)網(wǎng)系統(tǒng)中的電機(jī)應(yīng)用方案通常涉及到電機(jī)控制、監(jiān)測和維護(hù)等方面。以下是一些常見的物聯(lián)網(wǎng)電機(jī)應(yīng)用方案:
1、智能家居:在智能家居中,物聯(lián)網(wǎng)電機(jī)可以用于控制窗簾、窗戶、門鎖等設(shè)備的開關(guān)。通過物聯(lián)網(wǎng)技術(shù),可以實(shí)現(xiàn)遠(yuǎn)程控制、定時控制、場景控制等功能,提高家居的智能化水平。
2、工業(yè)自動化:在工業(yè)自動化中,物聯(lián)網(wǎng)電機(jī)可以用于控制生產(chǎn)線、物流輸送線等設(shè)備的運(yùn)行。通過物聯(lián)網(wǎng)技術(shù),可以實(shí)現(xiàn)設(shè)備的遠(yuǎn)程監(jiān)控、故障診斷、預(yù)測維護(hù)等功能,提高生產(chǎn)效率和降低維護(hù)成本。
3、智能交通:在智能交通中,物聯(lián)網(wǎng)電機(jī)可以用于控制信號燈、路燈、廣告牌等設(shè)備的開關(guān)。通過物聯(lián)網(wǎng)技術(shù),可以實(shí)現(xiàn)設(shè)備的遠(yuǎn)程控制、自適應(yīng)控制等功能,提高交通的安全性和效率。
4、智能農(nóng)業(yè):在智能農(nóng)業(yè)中,物聯(lián)網(wǎng)電機(jī)可以用于控制灌溉系統(tǒng)、通風(fēng)系統(tǒng)、遮陽系統(tǒng)等設(shè)備的運(yùn)行。通過物聯(lián)網(wǎng)技術(shù),可以實(shí)現(xiàn)設(shè)備的遠(yuǎn)程監(jiān)控、自動化控制等功能,提高農(nóng)業(yè)的生產(chǎn)效率和降低勞動成本。
本文會為大家詳解電機(jī)家族中的重要成員——舵機(jī)。
舵機(jī)的定義
首先,舵機(jī)”這個名號其實(shí)是一個俗稱,是那些玩航模、船模的人起的名字,因?yàn)檫@種電機(jī)常被用于舵面控制。舵機(jī)其實(shí)就是一個簡單的伺服電機(jī)系統(tǒng),也是最常見的伺服電機(jī)系統(tǒng)。
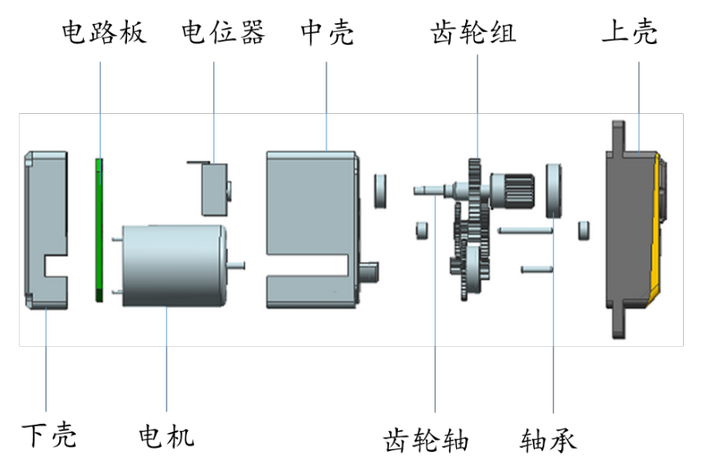
舵機(jī)是一種位置(角度)伺服的驅(qū)動器,適用于需要角度不斷變化并可以保持的控制系統(tǒng),由下殼、控制電路、電機(jī)、中殼、齒輪組、軸承以及上殼組成。舵機(jī)是一個閉環(huán)控制系統(tǒng)。控制電路板接收來自信號線的控制信號,控制電機(jī)轉(zhuǎn)動,電機(jī)帶動一系列齒輪組,減速后傳動至輸出舵盤。舵機(jī)的輸出軸與位置反饋電位計相連,舵盤轉(zhuǎn)動的同時帶動位 置反饋電位計,電位計將輸出一個電壓信號到控制電路板進(jìn)行反饋,然后控制電路板根據(jù)所在位置決定電機(jī)轉(zhuǎn)動的方向和速度,從而達(dá)到目標(biāo)停止。
舵機(jī)的結(jié)構(gòu)
類似舵機(jī)這樣的伺服系統(tǒng)通常由小型電動機(jī),電位計,嵌入式控制系統(tǒng)和變速箱組成。電機(jī)輸出軸的位置由內(nèi)部電位計不斷采樣測量,并與微控制器(例如STM32,Arduino)設(shè)置的目標(biāo)位置進(jìn)行比較;根據(jù)相應(yīng)的偏差,控制設(shè)備會調(diào)整電機(jī)輸出軸的實(shí)際位置,使其與目標(biāo)位置匹配。這樣就形成了閉環(huán)控制系統(tǒng)。
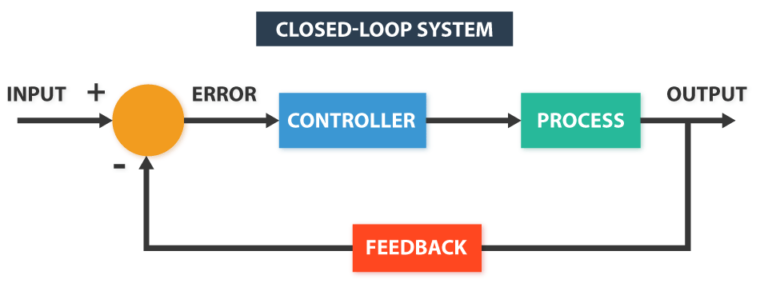
閉環(huán)系統(tǒng)
變速箱降低了電機(jī)的轉(zhuǎn)速,從而增加了輸出軸上的輸出扭矩。輸出軸的最大速度通常約為60 RPM。
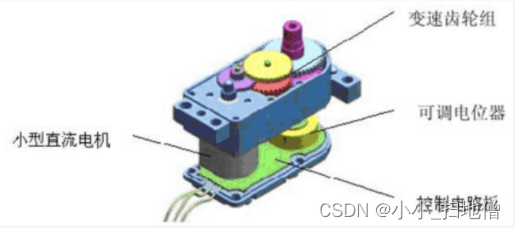
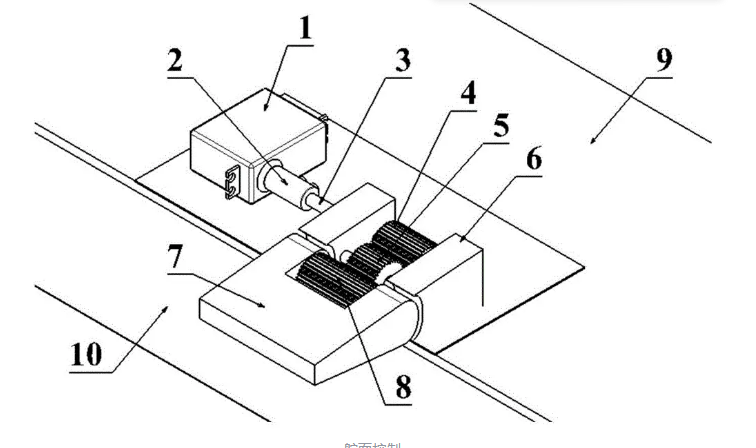
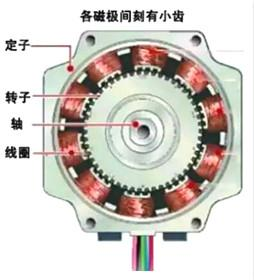
具體結(jié)構(gòu)如下圖所示;
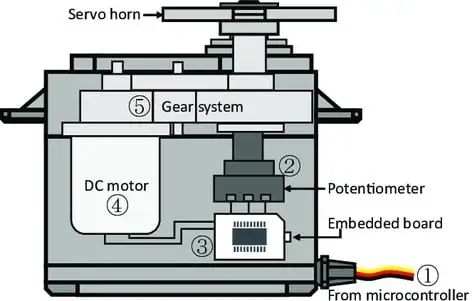
內(nèi)部結(jié)構(gòu)
①:信號線:接收來自微控制器的控制信號;
②:電位器:可以測量輸出軸的位置量,屬于整個伺服機(jī)構(gòu)的反饋部分;
③:內(nèi)部控制器:處理來自外部控制的信號,驅(qū)動電機(jī)以及處理反饋的位置信號,是整個伺服機(jī)構(gòu)的核心;
④:電機(jī):作為執(zhí)行機(jī)構(gòu),輸出多少轉(zhuǎn)速,轉(zhuǎn)矩,位置;
⑤:傳動機(jī)構(gòu)/舵機(jī)系統(tǒng):該機(jī)構(gòu)根據(jù)一定傳動比,將電機(jī)輸出的行程縮放到最終輸出的角度上;
舵機(jī)的原理
舵機(jī)內(nèi)部的控制電路接收來自信號線的PWM控制脈沖,控制電機(jī)旋轉(zhuǎn),電機(jī)帶動減速齒輪組,最后傳動輸出至舵盤,進(jìn)而使舵機(jī)轉(zhuǎn)動角度并保持。控制流程如下圖所示:

舵機(jī)內(nèi)部基準(zhǔn)電路產(chǎn)生了周期為20ms、脈寬為1.5ms的基準(zhǔn)信號,其體現(xiàn)為反饋基準(zhǔn)電壓Vref;
控制電路捕獲外部PWM控制信號,經(jīng)處理后輸出一個直流偏置電壓Vin;
將直流偏置電壓Vin和反饋基準(zhǔn)電壓Vref進(jìn)行比較,輸出電壓差;
電壓差輸出到電機(jī)驅(qū)動芯片驅(qū)動電機(jī),其中電壓差的正負(fù)決定電機(jī)的正反轉(zhuǎn),壓差大小決定旋轉(zhuǎn)的角度,電壓差為0時,電機(jī)停止轉(zhuǎn)動;
特別注意:采集的控制信號主要是脈沖的寬度,要使舵機(jī)輸出軸角度發(fā)生變化,改變的是脈沖寬度(PWM控制時是控制占空比)
標(biāo)準(zhǔn)的舵機(jī)有3條導(dǎo)線,分別是:電源線(紅色)、地線 (黑色或棕色)、控制線(黃色);

PWM信號由接收通道進(jìn)入信號解調(diào)電路進(jìn)行解調(diào),獲得一個直流偏置電壓。直流偏置電壓與電位器的電壓比較,獲得電壓差并輸出。該輸出送入電機(jī)驅(qū)動集成電路以驅(qū)動電機(jī)正反轉(zhuǎn)。當(dāng)電機(jī)轉(zhuǎn)動時,通過級聯(lián)減速齒輪帶動電位器旋轉(zhuǎn),直到電壓差為O,電機(jī)停止轉(zhuǎn)動。
舵機(jī)的控制信號是PWM信號,利用占空比的變化,改變舵機(jī)的位置。
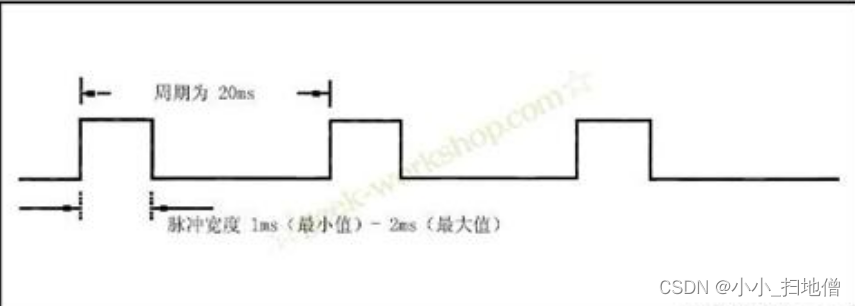
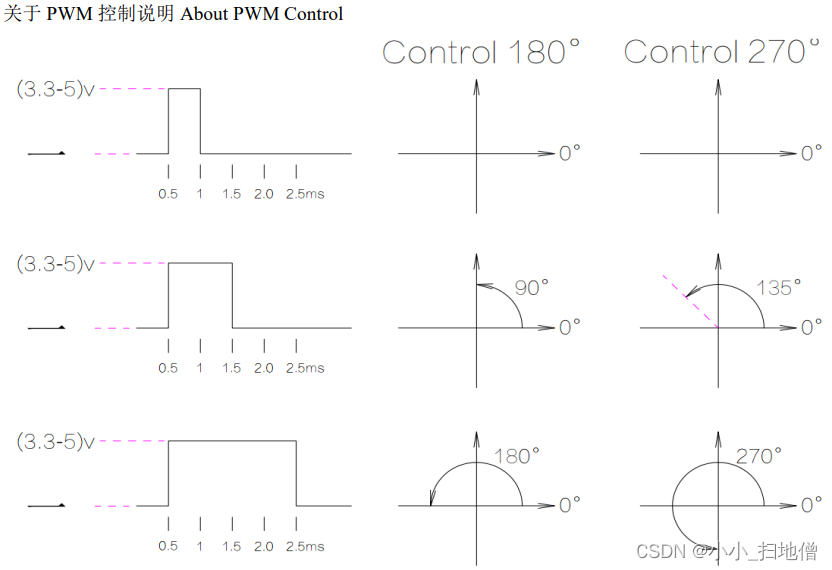
舵機(jī)的伺服系統(tǒng)由可變寬度的脈沖來進(jìn)行控制,控制線是用來傳送脈沖的。脈沖的參數(shù)有最小值,最大值,和頻率。一般而言,舵機(jī)的基準(zhǔn)信號都是周期為20ms,寬度為1.5ms。這個基準(zhǔn)信號定義的位置為中間位置。舵機(jī)有最大轉(zhuǎn)動角度,中間位置的定義就是從這個位置到最大角度與最小角度的量完全一樣。最重要的一點(diǎn)是,不同舵機(jī)的最大轉(zhuǎn)動角度可能不相同,但是其中間位置的脈沖寬度是一定的,那就是1.5ms。如下圖:
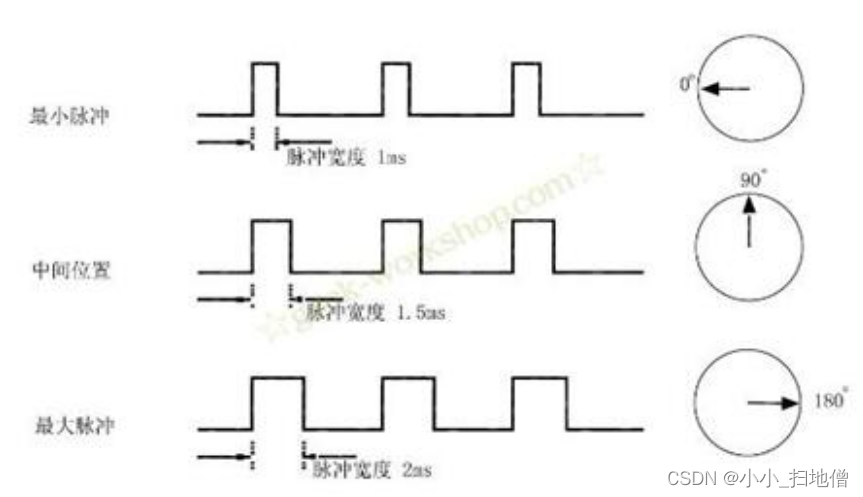
角度是由來自控制線的持續(xù)的脈沖所產(chǎn)生。這種控制方法叫做脈沖調(diào)制。脈沖的長短決定舵機(jī)轉(zhuǎn)動多大角度。例如:1.5毫秒脈沖會到轉(zhuǎn)動到中間位置(對于180°舵機(jī)來說,就是90°位置)。當(dāng)控制系統(tǒng)發(fā)出指令,讓舵機(jī)移動到某一位置,并讓他保持這個角度,這時外力的影響不會讓他角度產(chǎn)生變化,但是這個是由上限的,上限就是他的最大扭力。除非控制系統(tǒng)不停的發(fā)出脈沖穩(wěn)定舵機(jī)的角度,舵機(jī)的角度不會一直不變。
當(dāng)舵機(jī)接收到一個小于1.5ms的脈沖,輸出軸會以中間位置為標(biāo)準(zhǔn),逆時針旋轉(zhuǎn)一定角度。接收到的脈沖大于1.5ms情況相反。不同品牌,甚至同一品牌的不同舵機(jī),都會有不同的最大值和最小值。一般而言,最小脈沖為1ms,最大脈沖為2ms。如下圖:
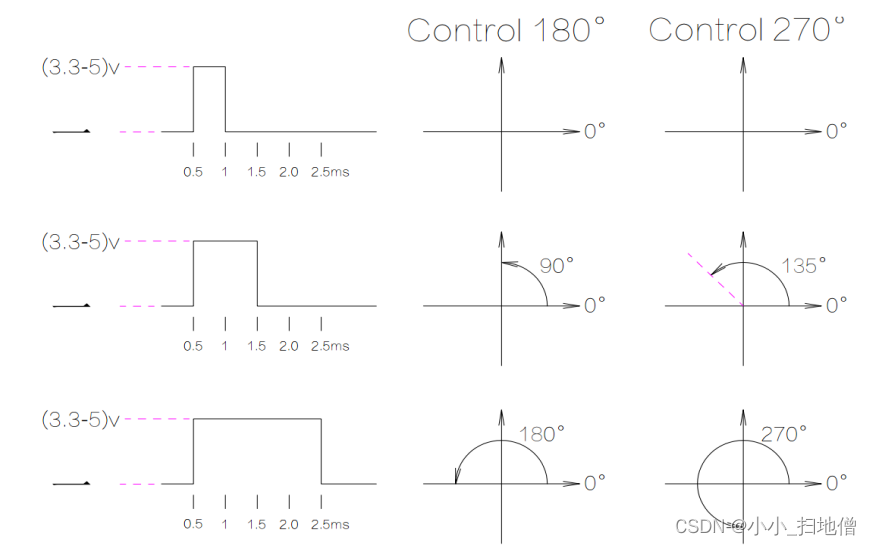
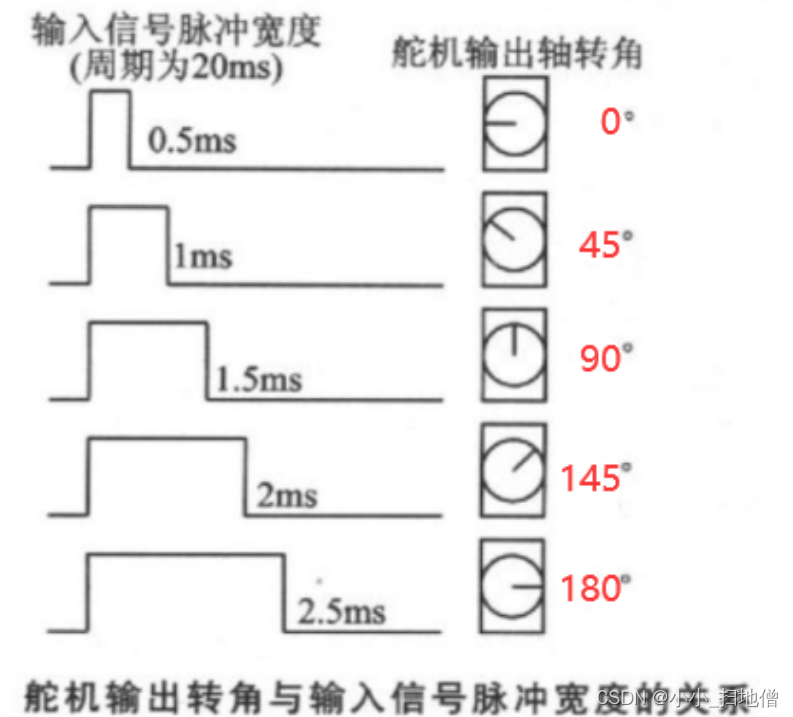
舵機(jī)一般用單片機(jī)或者數(shù)字電路控制。舵機(jī)工作主要跟控制線的高電平持續(xù)時間有關(guān)系,一般按0.5ms(毫秒)劃分,如果持續(xù)時間為0.5ms,1ms,1.5ms,2ms,2.5ms時,舵機(jī)會轉(zhuǎn)過不同的角度。
舵機(jī)的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms~2.5ms范圍內(nèi)的角度控制脈沖部分。以180度角度伺服為例,那么對應(yīng)的控制關(guān)系是為:脈沖 設(shè)置為 0.5ms旋轉(zhuǎn)角度為0度;脈沖 設(shè)置為 1.0ms旋轉(zhuǎn)角度為45度;脈沖 設(shè)置為 1.5ms旋轉(zhuǎn)角度為90度;脈沖 設(shè)置為 2.0ms旋轉(zhuǎn)角度為135度;脈沖 設(shè)置為 2.5ms旋轉(zhuǎn)角度為180度。
舵機(jī)的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms-2.5ms范圍內(nèi)的角度控制脈沖部分,總間隔為2ms。以180度角度伺服為例,那么對應(yīng)的控制關(guān)系是這樣的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
舵機(jī)的追隨特性
假設(shè)現(xiàn)在舵機(jī)穩(wěn)定在A點(diǎn),這時候CPU發(fā)出一個PWM信號,舵機(jī)全速由A點(diǎn)轉(zhuǎn)向B點(diǎn),在這個過程中需要一段時間,舵機(jī)才能運(yùn)動到B點(diǎn)。
保持時間為Tw
當(dāng)Tw≥△T時,舵機(jī)能夠到達(dá)目標(biāo),并有剩余時間;
當(dāng)Tw≤△T時,舵機(jī)不能到達(dá)目標(biāo);
理論上:當(dāng)Tw=△T時,系統(tǒng)最連貫,而且舵機(jī)運(yùn)動的最快。
實(shí)際過程中w不盡相同,連貫運(yùn)動時的極限△T比較難以計算出來。當(dāng)PWM信號以最小變化量即(1DIV=8us)依次變化時,舵機(jī)的分辨率最高,但是速度會減慢。
相關(guān)舵機(jī)的說明

SG90舵機(jī)
32單片機(jī)驅(qū)動單個舵機(jī)源碼
/*
單片機(jī):STM32F103RCT6/STM32F103C8T6 倍頻 72M 8路舵機(jī)控制
舵機(jī)IO PA0~PA3 PB3~PB6
*/
#include "stm32f10x_conf.h"
#define tb_interrupt_open() {__enable_irq();} //總中斷打開
void rcc_init(void); //主頻設(shè)置
void delay_ms(unsigned int t); //毫秒級別延時
void dj_io_init(void); //舵機(jī) IO 口初始化
void dj_io_set(u8 index, u8 level); //舵機(jī) IO 口高低電平設(shè)置
void TIM2_Int_Init(u16 arr,u16 psc);//舵機(jī) 定時器初始化
void gpioA_pin_set(unsigned char pin, unsigned char level);
void gpioB_pin_set(unsigned char pin, unsigned char level);
//舵機(jī)脈沖數(shù)組
int duoji_pulse[8] = {1500,1500,1500,1500,1500,1500,1500,1500} , i;
int main(void) {
rcc_init();
dj_io_init();
TIM2_Int_Init(20000,71);
tb_interrupt_open();
while(1) {
for(i=0;iARR = ((unsigned int)(duoji_pulse[duoji_index1]));
dj_io_set(duoji_index1, 1);
} else {
temp = 2500 - (unsigned int)(duoji_pulse[duoji_index1]);
if(temp < 20)temp = 20;
TIM2-?>ARR = temp;
dj_io_set(duoji_index1, 0);
duoji_index1 ++;
}
flag = !flag;
}
}
原文鏈接:https://blog.csdn.net/m0_73931287/article/details/130445572
舵機(jī)的分類
舵機(jī)根據(jù)電子分類可以分為模擬舵機(jī)與數(shù)字舵機(jī)。模擬舵機(jī)通過簡單地發(fā)送開關(guān)脈沖來調(diào)節(jié)電機(jī)的速度,對小指令的反應(yīng)遲緩,馬達(dá)旋轉(zhuǎn)較慢快。數(shù)字舵機(jī)相對于傳統(tǒng)模擬舵機(jī)可以根據(jù)微處理器的程序運(yùn)算而調(diào)整激勵馬達(dá)的動力,以適應(yīng)不同的功能要求,并優(yōu)化舵機(jī)的性能,能提供更高的精度以及更快的響應(yīng)和加速效果。根據(jù)信號類型可以分為PWM信號舵機(jī)、RS-485串口型舵機(jī)、TTL串口型舵機(jī)。主要有普通型、超小型,強(qiáng)力型和特殊用途型等幾種。
PWM信號舵機(jī)
相對于模擬通訊對噪聲的抵抗能力更強(qiáng),從模擬信號轉(zhuǎn)向PWM信號可以極大地延長通信距離。在接收端通過適當(dāng)?shù)腞C或LC網(wǎng)絡(luò)可以濾除調(diào)制高頻方波并將信號還原為模擬形式,實(shí)現(xiàn)了用數(shù)字方式來控制模擬信號,其高頻率、高效率、高可靠性的特點(diǎn)大大降低了成本和功耗。
RS-485 串口型舵機(jī)
采用平衡發(fā)送和差分接收,具有良好的抗干擾能力,信號能傳輸上千米。一條總線上允許掛載多個舵機(jī),且總線上每個舵機(jī)都有一個唯一的 ID(0~250),控制器通過舵機(jī) ID 對特定的舵機(jī)進(jìn)行訪問,也可以通過廣播 ID(254)向總線上的全部舵機(jī)發(fā)送數(shù)據(jù),另外可以使用超級ID(253)向總線上的舵機(jī)發(fā)送查詢命令,不同 ID 的舵機(jī)進(jìn)行分時應(yīng)答。
TTL串口型舵機(jī)
采用并行數(shù)據(jù)傳輸方式,對于計算機(jī)處理器控制設(shè)備內(nèi)部的數(shù)據(jù)傳輸較好,同時對于電源的要求不高以及熱損耗也較低,另外TTL電平信號直接與集成電路連接而不需要價格昂貴的線路驅(qū)動器以及接收器電路。
CAN總線舵機(jī)
采用串行異步通信,同一時刻只能有一個發(fā)送或接收信息,由CAN_H和CAN_L兩條信號線,以差分信號的形式進(jìn)行通訊, 抗干擾能力強(qiáng)。高低電平幅度低,數(shù)據(jù)傳輸速度相對較高。
舵機(jī)與伺服電機(jī)區(qū)別
舵機(jī)和伺服電機(jī)雖然都是用于控制旋轉(zhuǎn)角度的裝置,但兩者在構(gòu)造、應(yīng)用和工作原理等方面存在顯著的差異。
構(gòu)造:舵機(jī)主要由外殼、電路板、無核心馬達(dá)、齒輪與位置檢測器構(gòu)成。其中,位置檢測器是可變電阻,當(dāng)舵機(jī)轉(zhuǎn)動時,電阻值會隨之改變,從而可以檢測轉(zhuǎn)動的角度。而伺服電機(jī)通常由定子、轉(zhuǎn)子和其他控制電路組成。伺服控制電路位于電機(jī)之外,使得伺服電機(jī)在某種程度上可以被視為一個系統(tǒng)。
應(yīng)用:舵機(jī)在航模、小型機(jī)器人等領(lǐng)域中常用,具有輕量、小型、簡化和廉價的特點(diǎn),并配備有減速機(jī)構(gòu)。伺服電機(jī)則廣泛應(yīng)用于各種需要精確控制旋轉(zhuǎn)角度的場合,如工業(yè)自動化、機(jī)器人技術(shù)、數(shù)控機(jī)床等。
工作原理:舵機(jī)的工作原理基于可變電阻來檢測轉(zhuǎn)動的角度,并通過PWM信號進(jìn)行控制。伺服電機(jī)則通過控制脈沖時間的長短來控制轉(zhuǎn)動角度,其精度取決于編碼器的精度。此外,步進(jìn)電機(jī)和伺服電機(jī)在工作流程上也存在不同,步進(jìn)電機(jī)需要信號脈沖和方向脈沖,而伺服電機(jī)則通過電源連接開關(guān)進(jìn)行控制。
總的來說,舵機(jī)和伺服電機(jī)雖然都是用于控制旋轉(zhuǎn)角度的裝置,但它們在構(gòu)造、應(yīng)用和工作原理等方面存在明顯的區(qū)別。舵機(jī)更適合用于輕量、小型和廉價的場合,而伺服電機(jī)則適用于需要高精度和快速響應(yīng)的應(yīng)用。
舵機(jī)的選型參數(shù)
舵機(jī)選型的參數(shù)主要包括以下幾個方面:
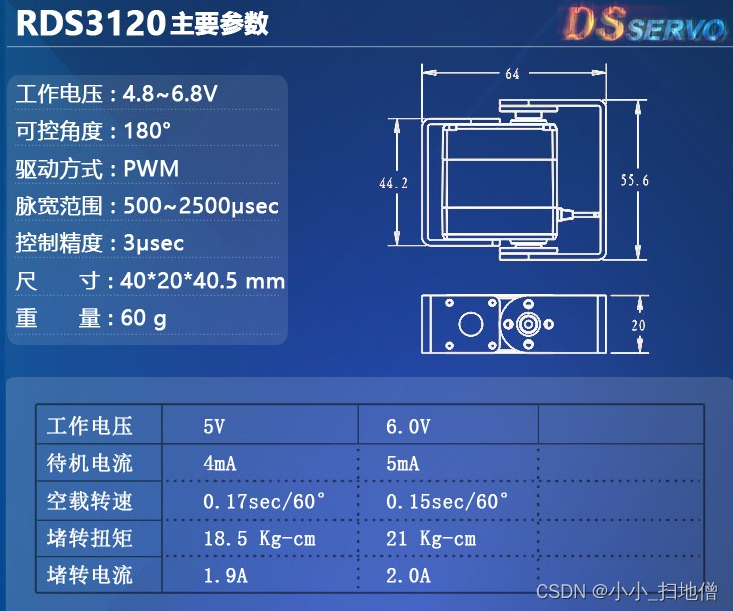
工作電壓:這是舵機(jī)正常工作的電壓范圍,不同型號的舵機(jī)有不同的工作電壓要求。例如,一些常見的舵機(jī)工作電壓范圍在4.8V到6V或4.8V到7.2V之間。
工作角度:這是指舵機(jī)可以旋轉(zhuǎn)的角度范圍。一般來說,舵機(jī)的旋轉(zhuǎn)角度有90度、180度等不同的選擇。
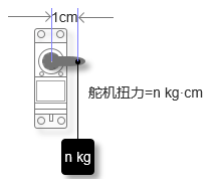
扭矩:扭矩是舵機(jī)產(chǎn)生的轉(zhuǎn)動力矩,表現(xiàn)為旋轉(zhuǎn)力的大小,通常以N·cm或kg/cm為單位。扭矩的大小決定了舵機(jī)能夠拉動多大的負(fù)載。
速度:速度是指舵機(jī)在沒有負(fù)載的情況下旋轉(zhuǎn)的速度,通常以秒/60度為單位。速度參數(shù)對于需要快速響應(yīng)的應(yīng)用來說非常重要。
工作電流:這是舵機(jī)在工作時消耗的電流大小,是評估舵機(jī)功耗和選擇電源的重要參數(shù)。
尺寸和重量:尺寸和重量是考慮舵機(jī)安裝空間和整體設(shè)備重量的重要因素。一般來說,尺寸越大、重量越重的舵機(jī),扭矩也會越大。
死區(qū)
使舵機(jī)轉(zhuǎn)動的最小脈沖寬度,低于該參數(shù),舵機(jī)不轉(zhuǎn)動;
停止角度的精確度,該數(shù)值越小,控制精度越高;
理解說明:
此參數(shù)是用于吸收舵機(jī)在最終停止位置往返振蕩所設(shè)置的。舵機(jī)接收到控制輸入信號,然后與基準(zhǔn)信號做差值,然后輸出差值脈沖用于控制舵機(jī)內(nèi)部直流電機(jī)正反轉(zhuǎn),經(jīng)過齒輪組減速后,驅(qū)動舵盤和電位器轉(zhuǎn)動,電位器輸出反饋基準(zhǔn)信號,直到電位器反饋的基準(zhǔn)信號與輸入信號完全一致時,舵機(jī)停止轉(zhuǎn)動。
舵機(jī)實(shí)際運(yùn)行到停止位置時,由于存在運(yùn)動慣量,電位器輸出的反饋基準(zhǔn)信號與輸入信號不能完全一致,差值脈沖在很小的范圍內(nèi)輸出,導(dǎo)致舵機(jī)在停止位置附近往返振蕩。
最小脈沖寬度的由來:為了解決往返振蕩問題,在接近停止位附近用電路方式將差值脈沖吸收。
精確度誤差的由來:由于差值脈沖被吸收掉,導(dǎo)致實(shí)際位置與目標(biāo)位置存在差異;限值的差值脈沖越小,越接近目標(biāo)位置。
死區(qū)參數(shù)優(yōu)缺點(diǎn):
優(yōu)點(diǎn):消除舵機(jī)在停止位置的往返振蕩;
缺點(diǎn):死區(qū)越小,精度越高,意味著死區(qū)范圍內(nèi)的差值脈沖調(diào)整越頻繁;加劇對齒輪組和電位器的磨損;
在選擇舵機(jī)時,需要根據(jù)實(shí)際項(xiàng)目需求,綜合考慮以上參數(shù)。例如,如果項(xiàng)目需要舵機(jī)拉動的負(fù)載較大,就需要選擇扭矩較大的舵機(jī);如果項(xiàng)目對速度有要求,就需要選擇速度較快的舵機(jī)。同時,還需要考慮舵機(jī)的尺寸和重量是否適合項(xiàng)目的安裝空間和要求。
此外,還需要注意舵機(jī)的控制信號類型和控制方式。一般來說,舵機(jī)的控制信號是PWM信號,需要設(shè)置PWM的周期為50Hz。控制方式可以是模擬信號控制或數(shù)字信號控制,具體選擇取決于項(xiàng)目的控制需求。
常見的舵機(jī)型號有SG90、MG996R、DS3218、MG90S、DS3225、FS5109M和MG995等,每種型號都有其特定的參數(shù)和應(yīng)用場景。因此,在選擇舵機(jī)時,需要綜合考慮項(xiàng)目需求和實(shí)際應(yīng)用場景,選擇最適合的舵機(jī)型號和參數(shù)。
舵機(jī)的應(yīng)用場景
舵機(jī)在多個領(lǐng)域都有廣泛的應(yīng)用,主要包括以下幾個方面:
機(jī)器人:在機(jī)器人領(lǐng)域中,舵機(jī)通常用于控制運(yùn)動關(guān)節(jié)的轉(zhuǎn)動,實(shí)現(xiàn)機(jī)器人的動作控制。通過精確控制舵機(jī)的角度和速度,可以使機(jī)器人完成各種復(fù)雜的動作和任務(wù)。
航模:在航模領(lǐng)域中,舵機(jī)用于控制舵面的轉(zhuǎn)動,從而改變飛機(jī)的飛行姿態(tài)。航模愛好者可以通過調(diào)整舵機(jī)的參數(shù)和角度,實(shí)現(xiàn)飛機(jī)的起飛、爬升、俯沖、翻滾等各種飛行動作。
汽車:在汽車領(lǐng)域中,舵機(jī)用于控制方向盤的轉(zhuǎn)動,實(shí)現(xiàn)車輛的轉(zhuǎn)向。一些高性能汽車或智能駕駛汽車可能會使用舵機(jī)來實(shí)現(xiàn)更精確和快速的方向控制。
船舶:在船舶領(lǐng)域中,舵機(jī)用于控制舵輪的轉(zhuǎn)動,實(shí)現(xiàn)船舶的轉(zhuǎn)向。舵機(jī)在船舶航行中發(fā)揮著至關(guān)重要的作用,可以幫助船舶保持正確的航向和穩(wěn)定性。
此外,舵機(jī)還廣泛應(yīng)用于玩具、飛機(jī)、潛艇模型等領(lǐng)域。隨著技術(shù)的不斷發(fā)展,舵機(jī)的應(yīng)用場景也在不斷擴(kuò)展。總之,舵機(jī)作為一種位置(角度)伺服的驅(qū)動器,適用于那些需要角度不斷變化并可以保持的控制系統(tǒng)。在各種需要精確控制旋轉(zhuǎn)角度的場合中,舵機(jī)都發(fā)揮著不可或缺的作用。
實(shí)例
舵機(jī)在機(jī)電系統(tǒng)中作為基本的輸出執(zhí)行機(jī)構(gòu),簡單的控制和輸出使得單片機(jī)系統(tǒng)能輕松與其進(jìn)行對接,其優(yōu)越的角度控制性能在飛機(jī)、潛艇模型,遙控機(jī)器人、物流、機(jī)器人、人工智能、汽車等領(lǐng)域中被廣泛使用。例如,在無人機(jī)或航模中,舵機(jī)可以控制機(jī)翼的上下、左右轉(zhuǎn)動,從而控制飛行方向、高度等。

在機(jī)器人中,舵機(jī)可以控制機(jī)器人的關(guān)節(jié)運(yùn)動,使機(jī)器人能夠完成各種復(fù)雜的動作,如抓取、拍攝、移動等。

供應(yīng)商A:東莞市德晟智能科技有限公司
https://www.dspower.net/pd45594901.html
1、產(chǎn)品能力
(1)選型手冊
https://www.dspower.net/pl3684832.html
(2)主推型號1:DS-S006
對應(yīng)的產(chǎn)品詳情介紹

SG90舵機(jī)高精度防燒防抖遙控飛機(jī)無人機(jī)伺服器玩具車模9g數(shù)字舵機(jī)小重量,小尺寸全塑料外殼兩色可選,全新外觀+輕薄機(jī)身高精度全塑膠齒輪一體成型,強(qiáng)度高、咬合性好、有效防掃齒采用進(jìn)口電位器,精度高、壽命長;(有效壽命超過五十萬次,可升級為磁編碼器)堵轉(zhuǎn)時間和電流超過預(yù)設(shè)值,做降流和斷電處理,防堵防燒
三防處理(防水等級可定制)
產(chǎn)品尺寸
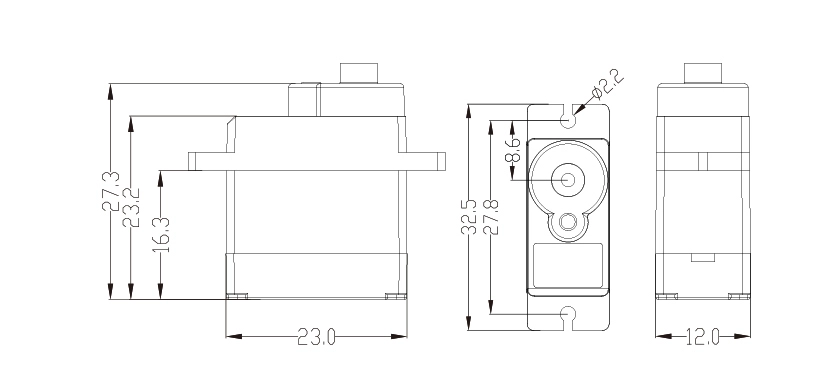
產(chǎn)品規(guī)格
表格 還在加載中,請等待加載完成后再嘗試復(fù)制
使用場景

本文章源自奇跡物聯(lián)開源的物聯(lián)網(wǎng)應(yīng)用知識庫Cellular IoT Wiki,更多技術(shù)干貨歡迎關(guān)注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學(xué)們走進(jìn)AmazIOT知識庫的世界!
這里是為物聯(lián)網(wǎng)人構(gòu)建的技術(shù)應(yīng)用百科,以便幫助你更快更簡單的開發(fā)物聯(lián)網(wǎng)產(chǎn)品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯(lián)網(wǎng) ODM/OEM 解決方案的實(shí)踐過程中,一直被物聯(lián)網(wǎng)技術(shù)碎片化與產(chǎn)業(yè)資源碎片化的問題所困擾。從產(chǎn)品定義、芯片選型,到軟硬件研發(fā)和測試,物聯(lián)網(wǎng)技術(shù)的碎片化以及產(chǎn)業(yè)資源的碎片化,始終對團(tuán)隊的產(chǎn)品開發(fā)交付質(zhì)量和效率形成制約。為了減少因物聯(lián)網(wǎng)碎片化而帶來的重復(fù)開發(fā)工作,我們著手對物聯(lián)網(wǎng)開發(fā)中高頻應(yīng)用的技術(shù)知識進(jìn)行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應(yīng)用生態(tài)。后來我們發(fā)現(xiàn),很多物聯(lián)網(wǎng)產(chǎn)品開發(fā)團(tuán)隊都面臨著相似的困擾,于是,我們決定向全體物聯(lián)網(wǎng)行業(yè)開發(fā)者開放奇跡物聯(lián)內(nèi)部沉淀的應(yīng)用技術(shù)知識庫 Wiki,期望能為更多物聯(lián)網(wǎng)產(chǎn)品開發(fā)者減輕一些重復(fù)造輪子的負(fù)擔(dān)。
Cellular IoT Wiki沉淀的技術(shù)內(nèi)容方向如下:
奇跡物聯(lián)的業(yè)務(wù)服務(wù)范圍:基于自研的NB-IoT、Cat1、Cat4等物聯(lián)網(wǎng)模組,為客戶物聯(lián)網(wǎng)ODM/OEM解決方案服務(wù)。我們的研發(fā)技術(shù)中心在石家莊,PCBA生產(chǎn)基地分布在深圳、石家莊、北京三個工廠,滿足不同區(qū)域&不同量產(chǎn)規(guī)模&不同產(chǎn)品開發(fā)階段的生產(chǎn)制造任務(wù)。跟傳統(tǒng)PCBA工廠最大的區(qū)別是我們只服務(wù)物聯(lián)網(wǎng)行業(yè)客戶。
連接我們,和10000+物聯(lián)網(wǎng)開發(fā)者一起 降低技術(shù)和成本門檻
讓蜂窩物聯(lián)網(wǎng)應(yīng)用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術(shù)交流群”,隨時找到我們哦~
點(diǎn)擊鏈接如何加入奇跡物聯(lián)技術(shù)話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術(shù)話題群攻略
Hey 物聯(lián)網(wǎng)從業(yè)者,
你是否有了解過奇跡物聯(lián)的官方公眾號“eSIM物聯(lián)工場”呢?
這里是奇跡物聯(lián)的物聯(lián)網(wǎng)應(yīng)用技術(shù)開源wiki主陣地,歡迎關(guān)注公眾號,不迷路~
及時獲得最新物聯(lián)網(wǎng)應(yīng)用技術(shù)沉淀發(fā)布
(如有侵權(quán),聯(lián)系刪除)
審核編輯 黃宇
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2930文章
46188瀏覽量
391616 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9287瀏覽量
149255
發(fā)布評論請先 登錄
物聯(lián)網(wǎng)藍(lán)牙模塊有哪些優(yōu)勢?
物聯(lián)網(wǎng)的應(yīng)用范圍有哪些?
物聯(lián)網(wǎng)未來發(fā)展趨勢如何?
物聯(lián)網(wǎng)工程師為什么要學(xué)Linux?
舵機(jī)與伺服電機(jī)有的區(qū)別

宇樹科技在物聯(lián)網(wǎng)方面
物聯(lián)網(wǎng)就業(yè)有哪些高薪崗位?
舵機(jī)在自動化設(shè)備中的應(yīng)用
舵機(jī)的類型及其特點(diǎn)
舵機(jī)與伺服電機(jī)的區(qū)別
漫途LoRa家族系列產(chǎn)品,高效、穩(wěn)定、智能的物聯(lián)網(wǎng)通信!

物聯(lián)網(wǎng)行業(yè)中的電機(jī)家族成員解密(二)_步進(jìn)電機(jī)篇
物聯(lián)網(wǎng)行業(yè)中的電機(jī)家族成員解密(一)_電機(jī)總述篇





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論