 物聯網行業中汽車電子控制系統分享_CAN接口芯片詳解
物聯網行業中汽車電子控制系統分享_CAN接口芯片詳解
物聯網系統中使用CAN(Controller Area Network,控制器局域網絡)接口芯片的原因主要可以歸納為以下幾點:
高可靠性和穩定性
差分信號傳輸:CAN接口芯片采用差分信號傳輸技術,這種技術能夠有效抗干擾和抑制傳輸誤碼,從而確保數據傳輸的可靠性和穩定性。這對于物聯網系統來說至關重要,因為物聯網系統往往需要在復雜多變的環境中進行數據傳輸,而CAN接口芯片的高可靠性能夠確保數據傳輸的準確性和完整性。
錯誤檢測和糾正:CAN協議內置了循環冗余校驗(CRC)和錯誤檢測的確認機制,能夠及時發現并糾正傳輸過程中的錯誤,進一步提高數據傳輸的可靠性。
高帶寬和實時性
高速傳輸:CAN接口芯片支持高速傳輸,能夠在短時間內傳送大量數據,這對于需要實時數據傳輸的物聯網系統來說尤為重要。例如,在工業自動化、智能交通等領域,實時性是系統性能的關鍵指標之一。
低延遲:CAN總線采用載波檢測多址和碰撞檢測(CSMA/CD)機制,確保設備在傳輸數據前能夠感知總線是否空閑,從而避免數據碰撞和延遲。這種機制使得CAN接口芯片在物聯網系統中能夠實現低延遲的數據傳輸。
多設備連接和擴展性
多節點通信:CAN接口芯片支持多節點之間的通信,能夠實現設備之間的高效連接和數據交換。在物聯網系統中,往往需要連接多個設備以實現復雜的功能和場景應用,而CAN接口芯片的多設備連接能力能夠滿足這一需求。
易于擴展:隨著物聯網系統的不斷發展和完善,可能需要連接更多的設備或擴展更多的功能。CAN接口芯片具有良好的擴展性,能夠輕松實現系統的擴展和升級。
簡化系統結構和降低成本
簡化布線:CAN接口芯片具有較高的集成度,能夠減少系統中的連接線路和外圍設備,從而簡化系統結構和布線難度。這有助于降低系統的復雜性和維護成本。
降低成本:由于CAN接口芯片具有多種功能和優勢,因此在物聯網系統中使用CAN接口芯片可以降低整體系統的成本。同時,由于CAN總線技術的廣泛應用和標準化程度較高,因此相關設備和配件的成本也相對較低。
應用場景
目前,CAN收發器系列芯片已廣泛應用于汽車BMS系統、車載ECU、儀表控制盤、車身控制、智能駕駛、車載診斷儀、工業PLC、 電梯 控制器、 電力 保護裝置等諸多領域。
典型應用案例(芯力特公司的第三代高速CAN FD收發器)
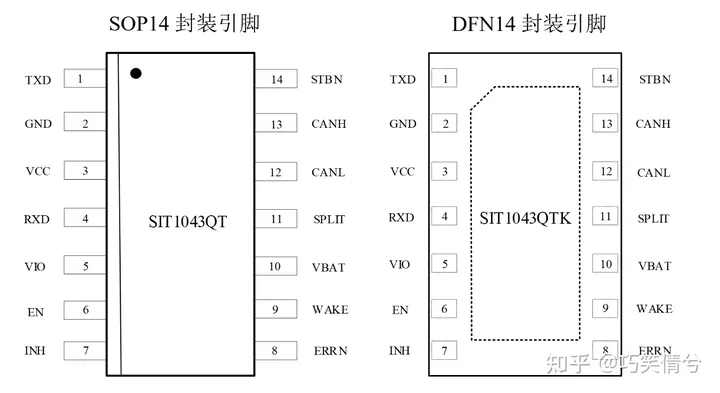
SIT1043Q屬于芯力特公司的第三代高速CAN FD收發器,目前已經通過第三方AEC-Q100認證、德國益馳CAN通信一致性測試、德國C&S兼容性測試。相比第一代基礎SIT1040Q和第二代CAN FD SIT1042Q CAN收發器,此芯片引腳更多功能更全。SIT1043Q在實現基本CAN收發器功能的同時,增強了電磁兼容性(EMC)性能,并引出SPLIT引腳穩定總線信號共模輸出,支持與電壓為3V至5V的MCU TXD&RXD電平適配。除此之外,同時還具有的高級功能包括:
支持通過INH引腳使能關斷整個節點電源,只保留SIT1043Q CAN收發器待機工作實 現節點功耗最低;
支持5種工作模式,5種模式MCU可以通過控制EN、STB引腳自由切換;
支持睡眠與待機低功耗模式下本地和遠程喚醒,并具有喚醒源識別功能;
支持多種保護和網絡診斷功能,其中包括CAN總線短路檢測和電池短路檢測;
支持部分信號增強功能(CAN SIC功能),芯片增加振鈴抑制與斜率控制電路,實現數據高速通信下減少總線噪聲消除總線振鈴干擾,提供可靠穩定的數據傳輸。
SIT1043Q CAN收發器引腳功能圖:

1、SIT1043Q CAN收發器在某汽車網關應用
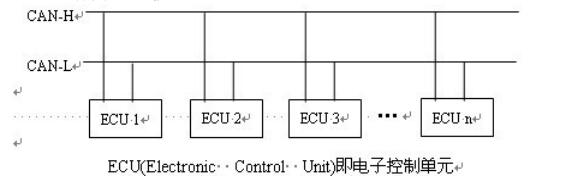
網關是汽車的中央樞紐,可安全地互連和處理異構汽車網絡來往于不同功能域的數據,例如動力、底盤和安全性、車身控制、車載信息娛樂系統、遠程信息處理和高級駕駛輔助系統。汽車網關處理不同的通信協議,如CAN、LIN、FlexRay和千兆以太網,同時安全地實時過濾數據,以防黑客攻擊。網關還為汽車內的不同電子控制單元(ECU)提供無線(OTA)固件升級。
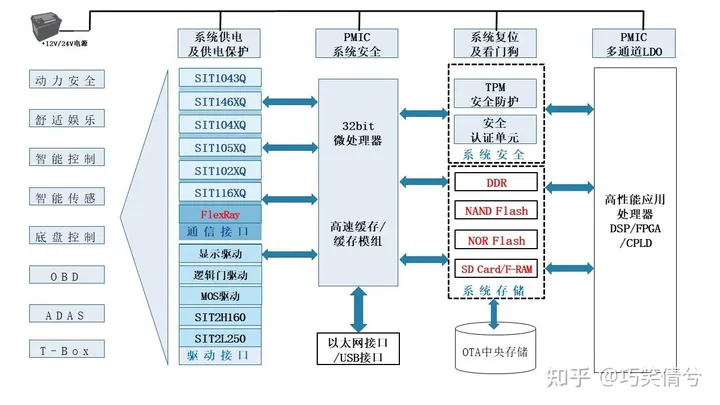
CAN收發器在某汽車網關應用
2、SIT1043Q CAN收發器在汽車BMS電池產品應用
在BMS系統中,當車輛沒有充電時,如果BMS系統的超低功耗待機,對延長汽車停放時間,增加汽車續航里程是比較完美的解決方案。客戶選用芯力特SIT1043Q CAN收發器來進行系統功耗控制管理,當BMS系統非充電時,SIT1043Q CAN收發器進入睡眠模式,在睡眠模式下內部模式控制電路將SIT1043Q自動切換到由VBAT 供電,同時INH引腳默認為高阻態,此時通過INH引腳控制LDO的使能EN=L,從而關斷LDO的+5V電源輸出,使BMS系統只保留SIT1043Q CAN收發器待機工作,從而實現大大降低系統功耗,減少電池能量損耗。
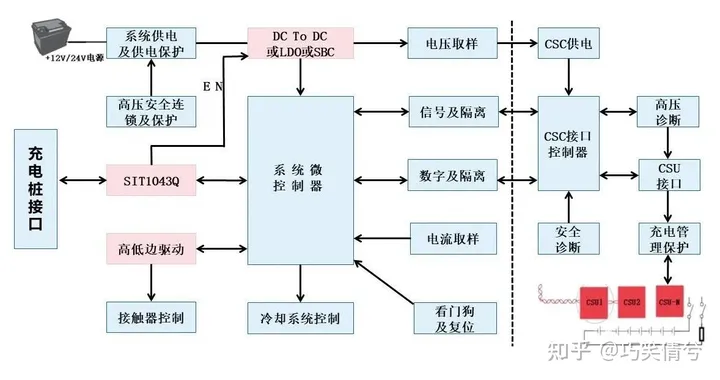
CAN收發器在汽車BMS電池產品應用
綜上所述,物聯網系統中使用CAN接口芯片的原因主要包括高可靠性和穩定性、高帶寬和實時性、多設備連接和擴展性以及簡化系統結構和降低成本等方面。這些優勢使得CAN接口芯片在物聯網系統中得到了廣泛的應用和推廣。
本文會再為大家詳解CAN芯片家族中的一員——CAN接口芯片
CAN接口芯片的基本概念
CAN收發器是一種用于CAN總線通信的專用芯片,主要用于將CAN控制器和CAN總線物理層之間的信號進行轉換和調節。
它的主要作用是將CAN控制器輸出的數字信號轉換為CAN總線所需要的物理信號,同時將CAN總線上接收到的物理信號轉換為數字信號,并將其傳遞給CAN控制器進行處理。
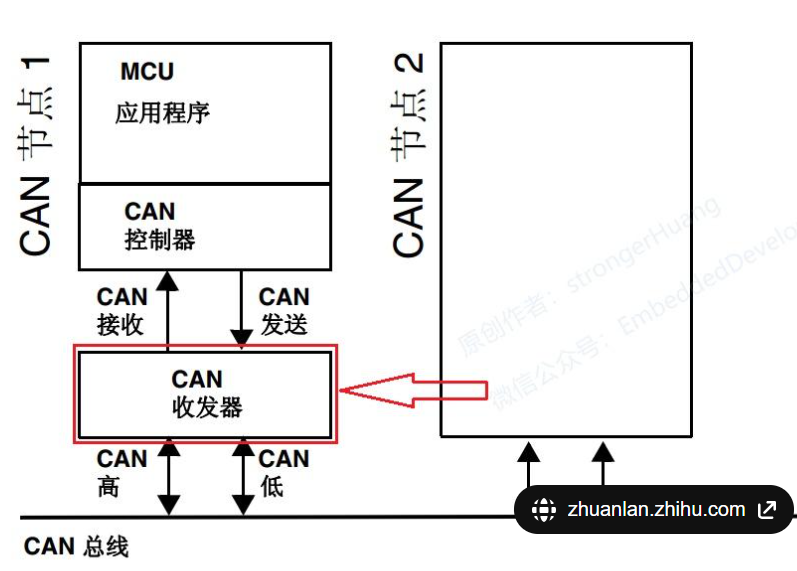
CAN收發器在整個CAN網絡中扮演著至關重要的角色。它類似于一個轉換器,將CAN控制器輸出的TTL信號(邏輯電平)轉換成CAN總線的差分信號。這種差分信號在兩條具有差分電壓的總線電纜上進行傳輸,從而實現了數據在CAN總線上的通信。CAN收發器的功能包括:
支持CAN總線的高速和低速傳輸,以滿足不同的應用需求。
電氣隔離:CAN收發器可以提供電氣隔離,從而避免CAN總線上的電氣噪聲和瞬態影響CAN控制器和其他設備的正常工作。
抑制電磁干擾:CAN收發器可以通過抑制電磁干擾,從而減少CAN總線上的噪聲,保證數據傳輸的可靠性。
自動發送/接收控制:CAN收發器可以自動檢測和控制發送和接收狀態,從而簡化CAN總線應用的設計和實現。
狀態指示燈:CAN收發器可以提供狀態指示燈,用于指示CAN總線的狀態和錯誤信息,方便用戶進行故障排查。
溫度控制:CAN收發器可以具備溫度控制功能,以確保CAN總線在各種環境條件下的正常工作。
總之,CAN收發器是CAN總線中非常重要的組成部分,它可以將CAN控制器和CAN總線物理層之間的信號進行轉換和調節,從而確保CAN總線通信的穩定和可靠性。
CAN接口芯片主要參數
CAN收發器是連接CAN控制系統與CAN總線網絡的橋梁,當選型CAN收發器時應該注意以下幾個參數:
1、輸入特性
對于隔離CAN收發器,輸入主要指連接CAN控制器一側的輸入特性,包含電源輸入與信號輸入。
根據控制器的CAN接口電壓可選擇3.3V或5V供電的CAN模塊,隔離CAN模塊正常輸入范圍為VCC±5%,主要考慮CAN總線電平能保持在典型值范圍內,同時也使次級的CAN芯片工作在標稱電源電壓附近。
對于單獨的CAN收發芯片,需要對芯片的VIO引腳接入與TXD信號電平相同的參考電壓,以匹配信號電平,若沒有VIO引腳,則應保持信號電平與VCC保持一致。使用CTM系列隔離收發器時需要匹配TXD的信號電平與供電電壓一致,即3.3V標準CAN控制器接口或5V標準CAN控制器接口。
2、傳輸特性
CAN收發器的傳輸特性主要為三個參數:發送延遲、接收延遲、循環延遲。選擇CAN收發器時我們認為其延遲參數越小越好,但小的傳輸延遲會帶來什么好處,是什么因素限定了CAN網絡的傳輸延遲?
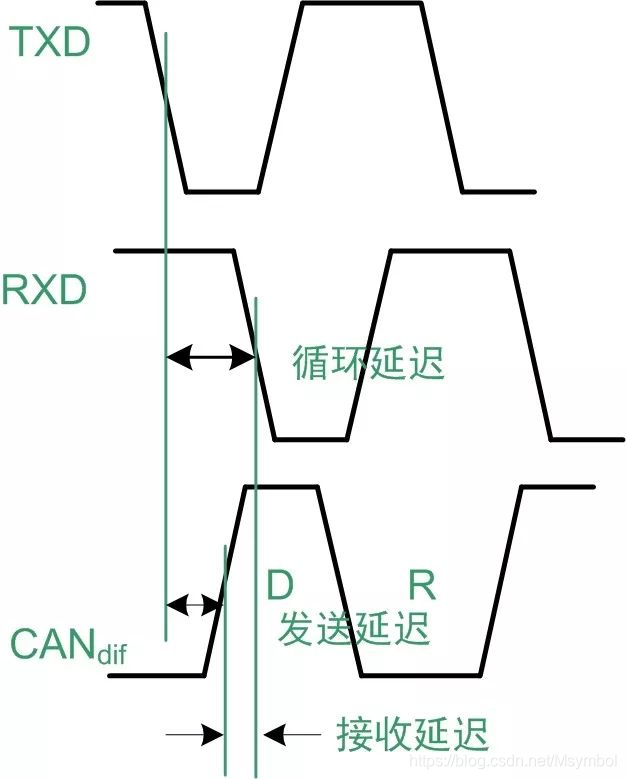
圖1 CAN收發器延遲特性
在CAN協議中,發送節點通過TXD發送數據的同時,RXD也在監測總線狀態。若RXD監位與發送位不一致,則節點檢測到一個位錯誤。若在仲裁場監測到的與實際發送不符,則節點停止發送,即總線上有多個節點同時發送數據,該節點沒有獲得數據發送優先權。
同樣在數據校驗和ACK響應位,均需要RXD實時獲取到總線的數據狀態。比如網絡正常通訊中,排除節點異常,為了可靠接收到ACK響應,就要保證ACK位在一定的時間內傳輸到控制器的RXD寄存器中,否則發送節點將檢測到一個應答錯誤。在1Mbps下設定采樣位置為70%。則從TXD發送,到RXD接收到ACK位,控制器會在ACK位時間起始的70%時間點采樣,即整個CAN網絡的循環延遲要小于700ns。
在隔離CAN網絡中,這個參數主要由隔離器延遲,CAN驅動器延遲,線纜長度決定。因此小的延遲時間有助于ACK位的可靠采樣, 增長總線長度。如圖2為使用CTM1051KAT收發器兩個節點通訊的ACK響應。收發器固有的典型延遲時間約為120ns。
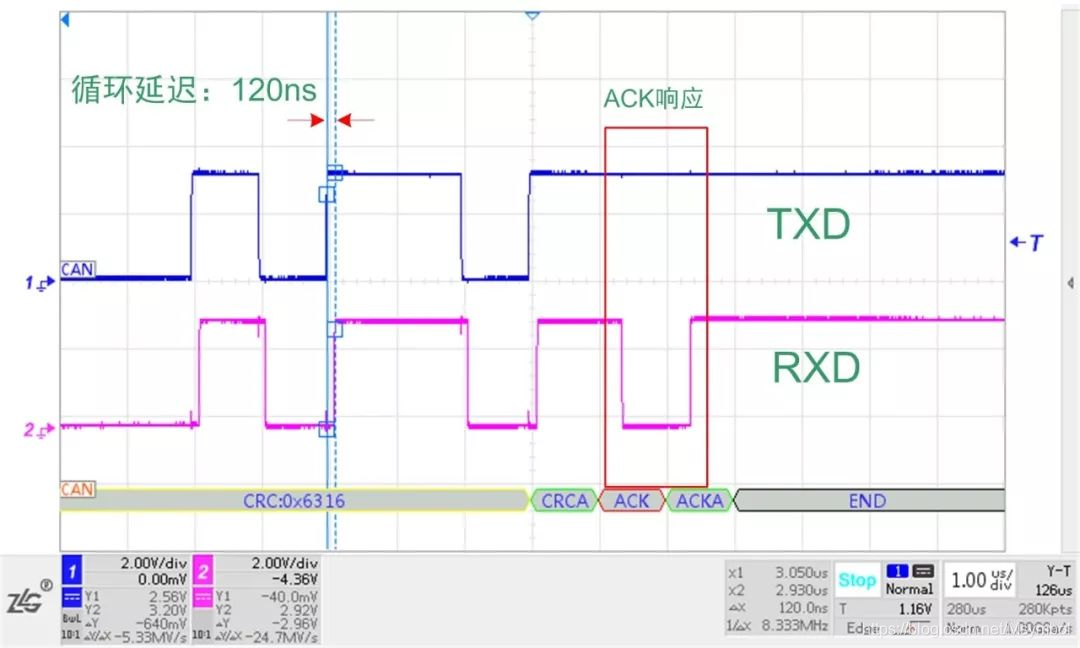
圖2 CAN網絡ACK響應
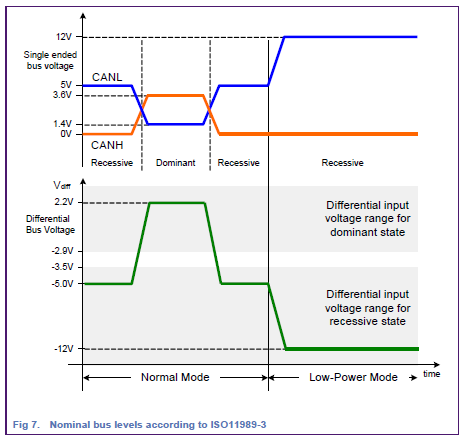
3、總線電平
在ISO11898-2規定的高速CAN網絡中,通常我們關心差分信號的幅值,這是總線數據傳輸的關鍵。目前有少數支持3.3V供電的CAN收發芯片,可直接應用于3.3V的控制系統中。
由于CAN收發器的結構特性,CANH、CANL電平與電源相關,雖然5V與3.3V工作電壓的CAN收發器輸出差分電平典型值相同,但3.3V收發器CANH、CANL相對于參考GND的幅值偏低,為2V左右,如TI的TCAN334。使用這兩種不同收發器組網,使用一般雙絞線或屏蔽雙絞線單點接地則完全可正常工作。若使用雙層屏蔽雙絞線,由于CANH、CANL、GND均為信號連接,則會因為兩種收發器的總線電壓對地幅值不同會造成通信異常。因此實際使用要避免其GND直接連接。
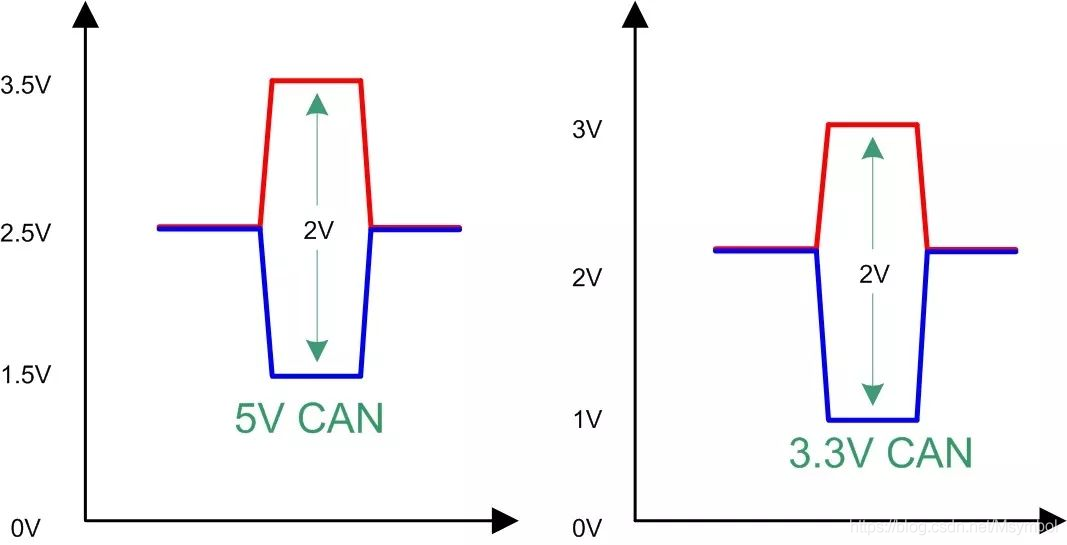
圖3 收發器總線電平
4、顯性超時
顯性超時的增加主要是為了防止CAN總線網絡由于硬件或軟件故障使得TXD長期處于“0”電平狀態。TXD保持“0”意味著CAN網絡為顯性電平,整個網絡的所有節點都不能收發數據,即總線處于癱瘓狀態。顯性超時可以通過收發器的硬件計時避免總線出現這種情況。
如圖4所示,Tdom為顯性超時時長,每次TXD為“0”時收發器開始計時,超過Tdom時收發器內部釋放總線,總線狀態處于隱性電平。不同收發器的顯性超時時間不同,實際應用需要考慮顯性超時時間對總線最低波特率的影響。CAN協議規定錯誤幀最多可以有11個連續的顯性位,為了避免顯性超時不對其造成影響,可以根據收發器的最小顯性超時時間計算實際使用的最低波特率。
BPSMin = 11/Tdom_min
如CTM1051Q的顯性超時時間為0.3ms,則計算最小波特率為11/0.3=36.67kbps。
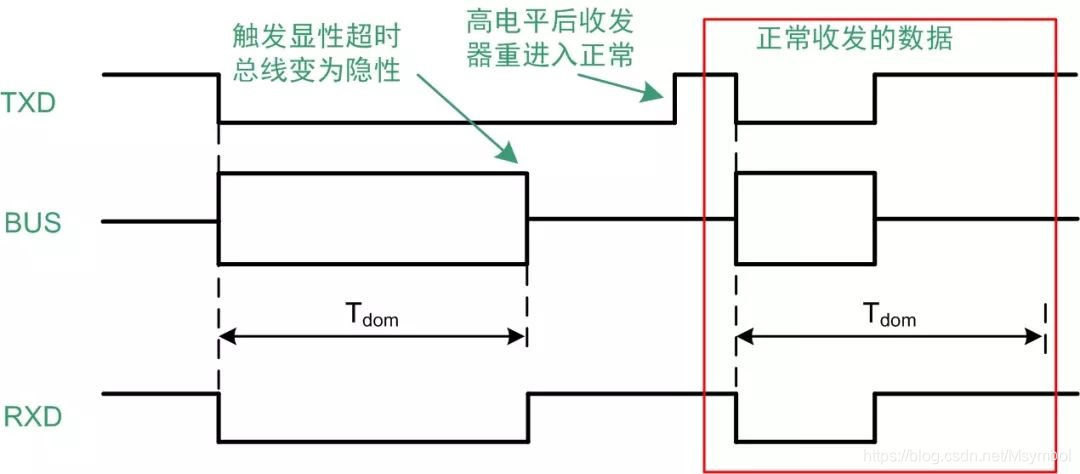
圖4 顯性超時時序
5、睡眠喚醒
ISO11898-5給出了低功耗模式的高速CAN總線單元,CAN收發器可以處于睡眠模式以降低功耗,并通過一定的總線時序喚醒收發器。如圖 5為CTM1044KAT的喚醒時序圖,睡眠狀態下,當總線出現長度大于TWK的3個顯性、隱性、顯性的電平后,睡眠狀態的收發器即被喚醒,中途遇到的任何小于TWK的干擾信號電平將被硬件過濾。
TWK的定義是為了使收發器僅安全可靠地接收喚醒信號,避免由于總線干擾導致誤觸發。CAN控制器收到RXD信號后,可通過軟件設置觸發喚醒控制器,從而進一步設置模塊STB引腳進入正常工作模式。這種喚醒模式中,當總線的所有節點都處于睡眠狀態時,只要總線某個節點發出信號,所有節點都會被喚醒。
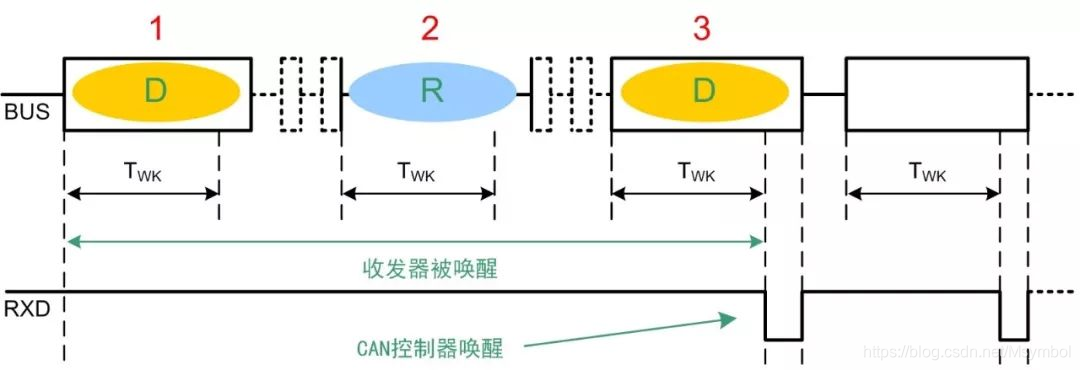
圖5 睡眠喚醒時序
CAN收發器的選型有很多的學問,關系到整體CAN網絡的穩定性與可靠性。為保證組網網絡的穩定可靠,可以選擇目前主流的全隔離CAN收發器模塊。
CAN FD介紹
CAN和CAN FD的物理層作用是一樣的,都是將3.3V/5V的邏輯信號轉換成差分信號,只是CAN的最高速率是1Mbps,CAN FD的最高速率是8Mbps。新出的收發器一般都是CAN和CAN FD同時支持的,只是型號尾綴不一樣。傳統的CAN一幀最多只能傳輸8個字節的數據,而CAN FD一幀最多可傳輸64個字節,可以有效地避免數據拆分傳輸的情況。
CAN接口芯片主流廠商型號介紹
NXP的CAN(FD)收發器介紹
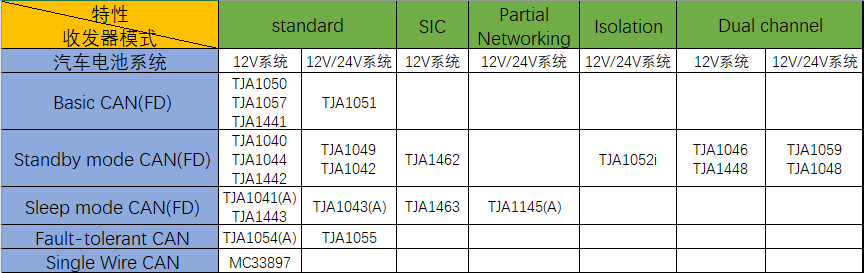
提到CAN(FD)收發器,NXP一直都是這個領域的領頭羊,也是其他做CAN收發器的芯片廠家模仿的對象,目前為止,NXP還是這個領域的第一。下面將根據CAN(FD)收發器的功能分類進行介紹。
Basic CAN(FD)
Basic CAN(FD)收發器,顧名思義,就是基礎CAN(FD)收發器,通常有一個控制引腳用來切換Normal mode和Silent mode,不帶有低功耗模式。一般符合11898-2的標準,電平標準如下(摘自NXP的應用筆記AH1014):
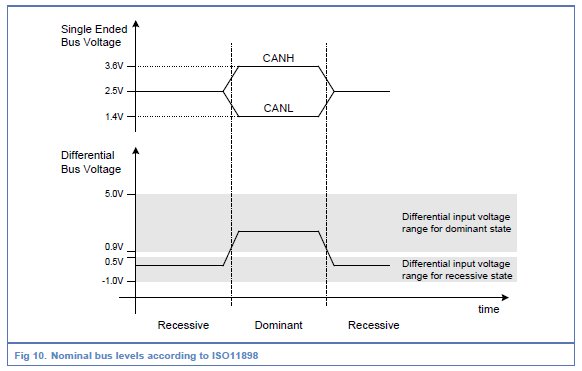
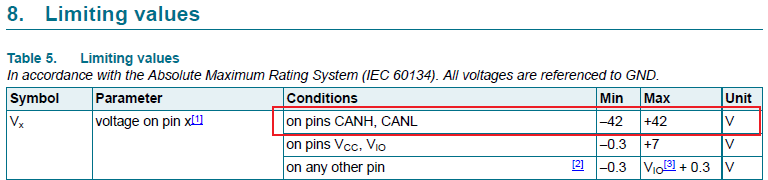
Basic CAN(FD)收發器根據CANH和CANL的耐壓不同分為兩類(以TJA1057為例,如下圖),一種是支持12V系統的,用在乘用車上,耐壓<42V;一種是12V和24V系統都支持的,也可以用在商用車上,耐壓58V。
基礎版收發器一般用在不需要待機休眠的產品上,如發動機ECU,變速箱TCU,底盤控制模塊CCM,電子助力轉向EPS等。主要型號如下:
12V系統:TJA1050,TJA1057和TJA1441,由于TJA1050屬于老產品,性能偏弱且不支持CAN FD,不推薦使用。TJA1441是今年剛剛量產的,供電范圍由于TJA1057,有一個子系列TJR1441達到AEC-Q100 Grade 0等級,支持150℃的環境溫度。
12/24V系統:TJA1051,如果新項目用于乘用車,推薦換成TJA1057,因為EMC性能做過優化,EMC要求不是特別高的情況下,可以省去共模電感。
Standby mode CAN(FD)
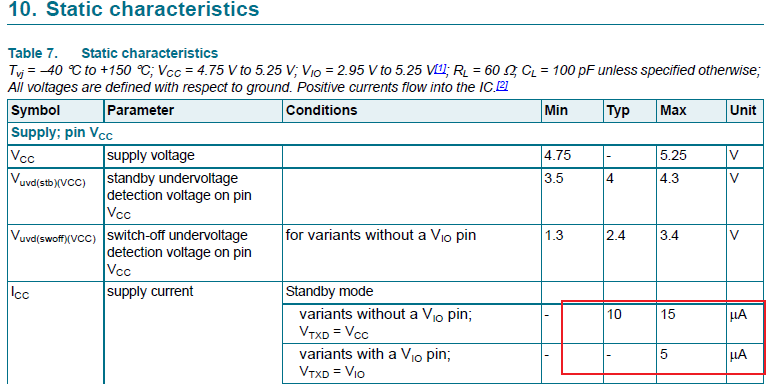
此收發器相比基礎版本增加了standby的低功耗模式,此模式的功耗在10uA左右,如下圖所示(以TJA1044為例)。同時CAN收發器處在standby模式時會開啟CAN總線喚醒功能,當CAN總線上有數據時,RXD會產生從高到低的跳變沿,此跳變沿可以被MCU用來做喚醒源。
Standby CAN收發器相比基礎版本除了增加低功耗模式之外,還增加了一個split引腳(TJA1040和TJA1042),主要是解決CAN總線信號對稱性不好的情況。如果是終端節點,建議120Ω的終端電阻分成兩個60Ω串聯,并接上split引腳,如果不是終端節點,換成兩個1.3kΩ的電阻串聯,或者使用車廠指定的值。如下是TJA1042T的推薦電路圖。TJA1044因為內部做了優化,不再需要split引腳。
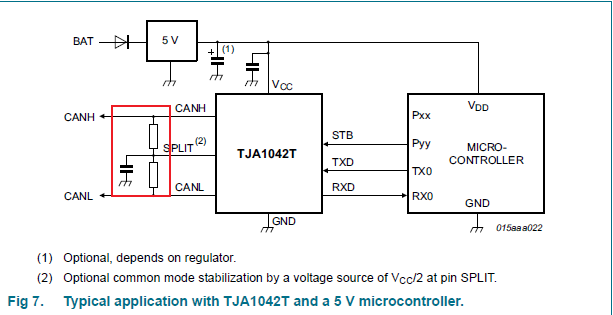
此種收發器一般用在KL30(長電)和KL15同時供電的產品上,如儀表,中控,導航等產品。
主要型號如下:
12V系統:TJA1040,TJA1044和TJA1442,TJA1040不推薦新項目使用,TJA1442是新產品,子系列TJR1442支持150℃環境溫度。
12/24V系統:TJA1049和TJA1042,TJA1049很少有客戶使用,但是TJA1042是目前市場上用的最多CAN收發器之一,如果目標應用是12V系統的,建議切換到TJA1044,尤其是TJA1044G版本,可以裸板過class 5。
Standby mode CAN(FD) + Dual channel
兩路CAN通道的standby CAN收發器,使用的客戶不多,我只看到一些做毫米波雷達的客戶使用。
主要型號如下:
12V系統:TJA1046和TJA1448,TJA1448是今年剛剛量產的,相比TJA1046,供電范圍更寬,standby模式下功耗更低,也有Gtade 0等級的TJR1448。
12/24V系統:TJA1059和TJA1048,TJA1059用的客戶相對多一些。
Standby mode CAN(FD) + Isolation
帶隔離功能的CAN收發器,在MCU和CAN總線之間提供隔離接口,防止汽車內的高壓通過CAN總線傳遞到低壓區域,芯片框圖如下(以TJA1052i為例)。
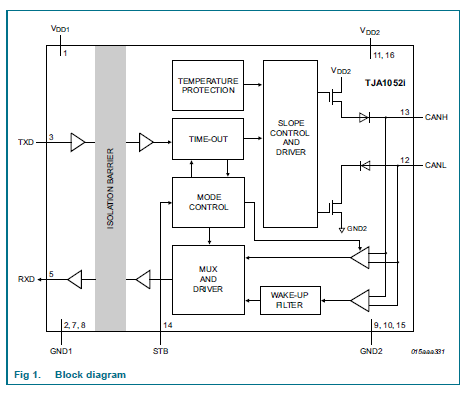
一般新能源車內和高壓電池包有連接的產品會用到此芯片,如空調壓縮機的控制器等。
主要型號如下:
12V系統:暫無
12/24V系統:TJA1052i,現在也有許多客戶使用隔離芯片加TJA1042/TJA1044的分立方案替代TJA1052i,或者使用國產的模塊方案。
Standby mode CAN(FD) + SIC
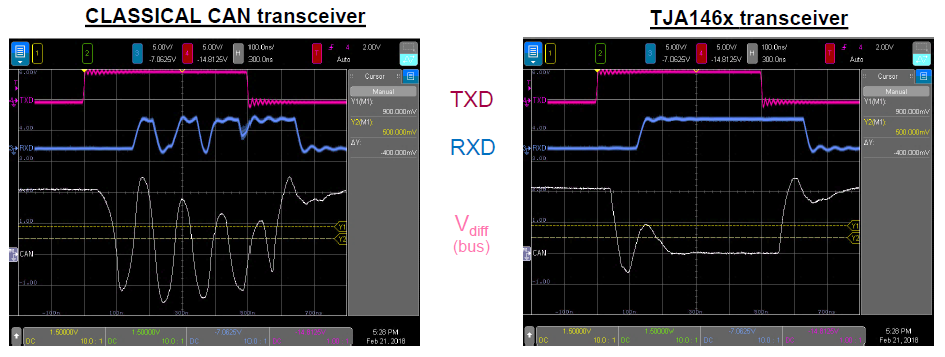
雖然很多CAN收發器已經升級到可以支持CAN FD,但是和之相連的CAN總線線束并沒有隨之提升,一旦CAN FD通信速率達到2Mbps或者更高,振鈴會非常大,影響信號傳輸質量。NXP推出的帶SIC(Signal Improvement Capability)功能的TJA146x芯片可以很好的解決該問題。
目前長安車廠會建議他們的供應商使用NXP的TJA146x芯片用于高速率的CAN FD通信。
主要型號如下:
12系統:TJA1462,對于2Mbps及以上的CAN FD通信,強烈推薦客戶使用TJA146x系列,如下是傳統CAN收發器和TJA1462在2Mbps CANFD通信下的對比圖(詳情參考NXP的應用筆記AH2002第15章節):
12V/24V系統:暫無
Sleep mode CAN(FD)
standby模式下的功耗已經很低了,如果車廠要求功耗做的更低,或者要求支持本地喚醒,此時就需要使用帶sleep模式,INH引腳和wake引腳的收發器了。
以TJA1043為例,如下面應用電路圖,當MCU配置TJA1043進入sleep模式之后,INH引腳拉低,LDO關閉輸出,MCU關閉不消耗電流。當CAN總線有喚醒信號,或者wake引腳有跳變沿,INH引腳被拉高,LDO打開輸出,MCU啟動并配置TJA1043進入Normal模式接收CAN報文。
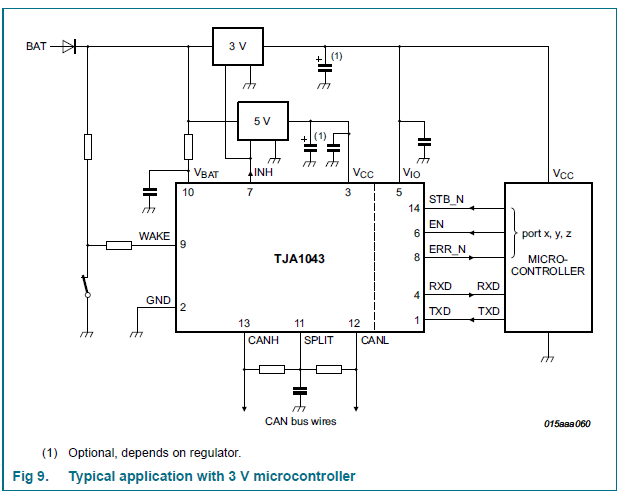
TJA1043增加了診斷引腳ERR,不過由于限制條件太多,不推薦使用。
主要型號如下:
12V系統:TJA1041(A)和TJA1443A,TJA1041產品較老,推薦使用新產品TJA1443,同樣也有Ta=150℃的TJR1443A。
24V系統:TJA1043(A),推薦使用TJA1043A,價格更好。
Sleep mode CAN(FD) + SIC
主要型號如下:
12V系統:TJA1463,Ta=150℃的型號為TJR1463
24V系統:
Sleep mode CAN(FD) + Partial networking
像T-BOX這類應用,一般對低功耗的要求更嚴格,如果使用TJA1043這類收發器,一旦被和自己不相關的CAN報文喚醒之后,需要軟件進行判斷處理,盡快的再次進入休眠模式。此時就對CAN收發器提出了新的功能需求,既局部網絡喚醒功能,相關標準為11898-6:2013。NXP支持該功能的收發器為TJA1145,可以通過SPI接口配置喚醒報文的速率,ID和數據,不滿足條件的CAN報文無法喚醒TJA1145。
需要提醒的是,TJA1145不支持CAN FD的局部網絡喚醒功能,如果TJA1145被用于CAN FD總線中,需要選用TJA1145T/FD and TJA1145TK/FD,其他型號接收到CAN FD的喚醒信號會識別為錯誤信號。
主要型號如下:
12V系統:暫無
24V系統:TJA1145(A),TJA1145馬上停產,建議使用TJA1145A。
Fault-tolerant CAN
有些車廠對于一些安全性比較高的場合會使用低速容錯CAN總線,要求供應商使用的CAN收發器滿足標準11898-3。低速容錯CAN和普通CAN不一樣,最高速率只有125K bps,且CAN總線斷了任意一根之后,仍可以使用另一個線繼續通信。低速從錯CAN的電平標準如下圖(摘自NXP的應用筆記AH0801),和普通CAN的電平標準不一樣。
主要型號如下:
12V系統:TJA1054(A),暫未遇到使用的客戶。
12V/24V系統:TJA1055,有客戶給車廠PSA做的中控項目用到過。
Single Wire CAN
MC88987是單總線CAN收發器,CAN收發器總結如下圖所示:
TI的CAN(FD)收發器介紹
TI的CAN收發器在市場上的份額也比較大,并且做了很多和NXP引腳兼容,命名相似的產品,大家見的最多的應該就是TCAN1042了。TI的官網的官網將其CAN收發器分成了四類,如下圖所示:

主要介紹汽車 CAN收發器介紹如下。
5V CAN(FD)收發器
TI的汽車級5V CAN(FD)收發器大概兩種,一種是和NXP做引腳兼容的,一種是增加新特性的。和NXP做兼容的型號主要有:
基礎類:SN65HVDA1050A-Q1,TCAN1051,TCAN1057
支持Standby:SN65HVD1040-Q1,TCAN1042,TCAN1044
雙通道Standby:TCAN1046,TCAN1048,
隔離Standby:ISO1042-Q1(總線耐壓更高,達到±70V)
支持sleep:TCAN1043,TCAN1463
增加新特性的型號主要有:
內部自帶5V電源的:TCAN1162-Q1
IO口電平支持1.8V的:TCAN1044AV-Q1,TCAN1057AV-Q1,TCAN1046AV-Q1
增加看門狗和LIMP功能的:TCAN1144-Q1,TCAN1146-Q1
集成CAN FD控制器的:TCAN4550-Q1
總線耐壓達到±70V的,TCAN1042H,TCAN1044H這類帶H尾綴的
3.3V CAN收發器
TI還有3.3V的CAN收發器,和5V CAN收發器的總線電平對比如下:
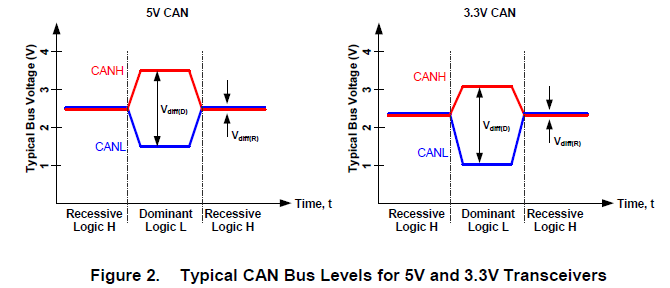
汽車級的3.3V CAN收發器如下圖所示,不過筆者沒怎么遇到使用3.3V CAN總線的車廠,一般現在MCU是3.3V供電的,也會選擇帶Vio引腳的5V CAN收發器,Vio引腳和MCU來自同一個供電源就可以了。

Infenion的CAN(FD)收發器介紹
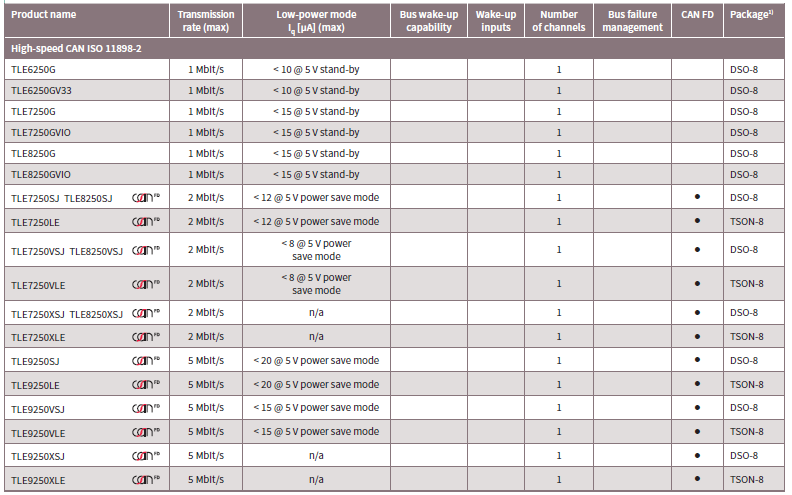
從Infeion官網下載的選型手冊看,主要分為帶wake-up功能和不帶wake-up功能兩類收發器,如下圖所示:
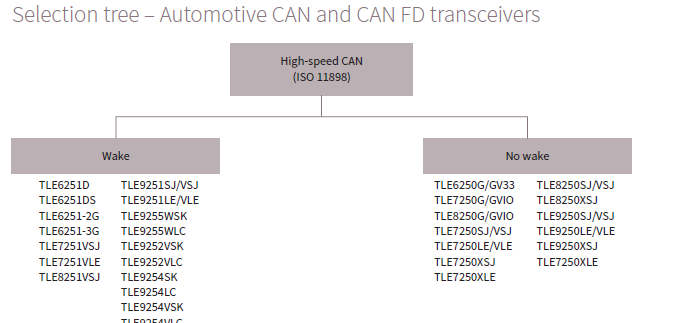
不帶wake-up功能
不帶wake-up功能的CAN(FD)收發器的主要型號如下圖:
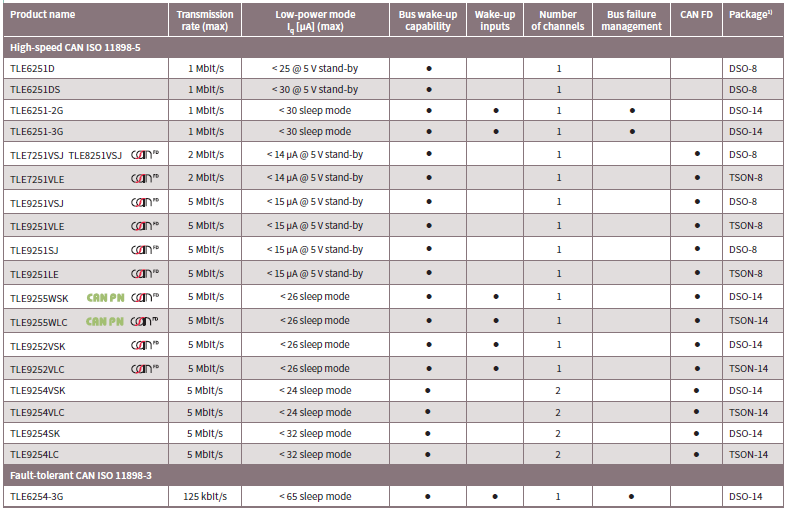
帶wake-up功能
帶wake-up功能的CAN(FD)收發器的主要型號如下圖:
ON的CAN(FD)收發器
ON的收發器種類相比NXP和TI不算太多,基本都是和NXP做引腳兼容,命令也比較相似。
基礎類:NCV7351,NCV7357
支持Standby:NCV7340,NCV7342,NCV7344,NCV7349
雙通道Standby:NCV7441,NCV7446
支持sleep:NCV7341,NCV7343
單線CAN:NCV7356
供應商A:NXP
1、產品能力
(1)選型手冊
NXPProductSelectorResults.xls
(2)主推型號1:TJA1057GTK
對應的產品詳情介紹
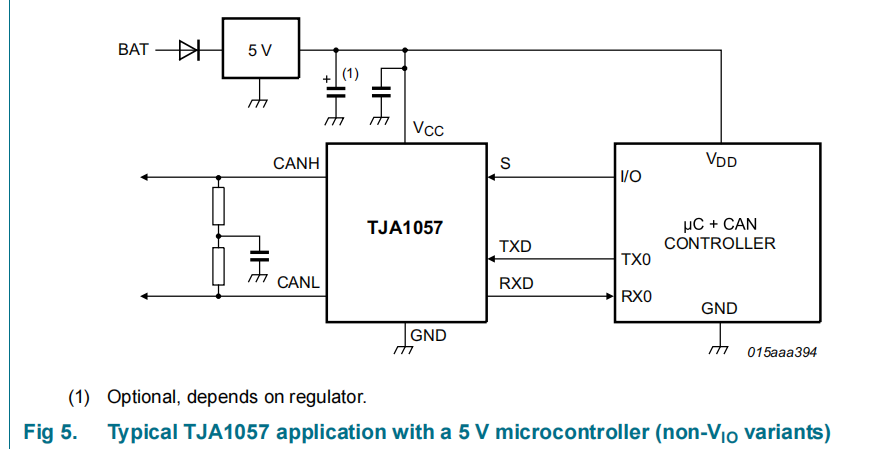
TJA1057是Mantis系列高速CAN收發器的一部分。它提供了控制器局域網(CAN)協議控制器和物理雙線CAN總線之間的接口。該收發器專為汽車工業中的高速CAN應用而設計,為(帶有CAN協議控制器的)微控制器提供差分傳輸和接收能力。
TJA1057提供了一套針對12V汽車應用進行優化的功能,與NXP的第一代和第二代CAN收發器(如TJA1050)相比有了顯著改進,并具有優異的電磁兼容性(EMC)性能。當電源電壓關閉時,TJA1057還對CAN總線顯示出理想的被動行為。
TJA1057GT(K)/3變體上的Vo引腳允許與3.3 V和5 V供應的微控制器直接接口。
TJA1057實現了ISO 11898-2:2016和SAE J2284-1至SAE J2284-5中定義的CAN物理層。TJA1057T被指定用于高達1Mbit/s的數據速率。定義環路延遲對稱性的附加定時參數被指定用于其他變體。這種實現方式能夠以高達5Mbit/s的數據速率在CAN FD快速相位中實現可靠的通信。
這些功能使TJA1057成為只需要基本CAN功能的HS-CAN網絡的絕佳選擇。
通用功能
完全符合ISO 11898-2:2016和SAE J2284-1至SAE J2284-5
優化用于12V汽車系統
EMC性能滿足汽車應用中LIN、CAN和FlexRayInterfaces的硬件要求,1.3版,2012年5月。
TJA1057x/3變體上的Vo輸入允許與3V至5V微控制器直接接口。沒有Vo引腳的變體可以與3.3 V和5 V供電的微控制器接口,前提是微控制器I/O耐受5 V。
AEC-Q100認證深綠色產品(無鹵素,符合RoHS)
Vio和非Vo變體都有SO8和無引線HVSON8(3.0mm x 3.0mm)封裝;HVSON8具有改進的自動光學檢測(AOl)功能。
可預測和故障安全行為
在所有供應條件下可預測的功能行為
收發器在未通電(零負載)時與總線斷開
傳輸數據(TXD)主要超時功能
TXD和S輸入引腳的內部偏置
保護
總線引腳上的高ESD處理能力(8 kV IEC和HBM)
保護總線引腳免受汽車環境中的瞬態影響
Vcc和Vo引腳上的欠電壓檢測
熱保護
TJA1057 CAN FD
保證數據速率高達5 Mbit/s的定時改進了210ns的TXD到RXD傳播延遲
硬件參考設計
2、支撐
(1)技術產品
技術資料
C459823_BE8028E39B5B6F0136568BF83B204F7A.pdf
本文章源自奇跡物聯開源的物聯網應用知識庫Cellular IoT Wiki,更多技術干貨歡迎關注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學們走進AmazIOT知識庫的世界!
這里是為物聯網人構建的技術應用百科,以便幫助你更快更簡單的開發物聯網產品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯網 ODM/OEM 解決方案的實踐過程中,一直被物聯網技術碎片化與產業資源碎片化的問題所困擾。從產品定義、芯片選型,到軟硬件研發和測試,物聯網技術的碎片化以及產業資源的碎片化,始終對團隊的產品開發交付質量和效率形成制約。為了減少因物聯網碎片化而帶來的重復開發工作,我們著手對物聯網開發中高頻應用的技術知識進行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應用生態。后來我們發現,很多物聯網產品開發團隊都面臨著相似的困擾,于是,我們決定向全體物聯網行業開發者開放奇跡物聯內部沉淀的應用技術知識庫 Wiki,期望能為更多物聯網產品開發者減輕一些重復造輪子的負擔。
Cellular IoT Wiki沉淀的技術內容方向如下:
奇跡物聯的業務服務范圍:基于自研的NB-IoT、Cat1、Cat4等物聯網模組,為客戶物聯網ODM/OEM解決方案服務。我們的研發技術中心在石家莊,PCBA生產基地分布在深圳、石家莊、北京三個工廠,滿足不同區域&不同量產規模&不同產品開發階段的生產制造任務。跟傳統PCBA工廠最大的區別是我們只服務物聯網行業客戶。
連接我們,和10000+物聯網開發者一起降低技術和成本門檻
讓蜂窩物聯網應用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術交流群”,隨時找到我們哦~
點擊鏈接如何加入奇跡物聯技術話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術話題群攻略
Hey 物聯網從業者,
你是否有了解過奇跡物聯的官方公眾號“eSIM物聯工場”呢?
這里是奇跡物聯的物聯網應用技術開源wiki主陣地,歡迎關注公眾號,不迷路~
及時獲得最新物聯網應用技術沉淀發布
(如有侵權,聯系刪除)
審核編輯 黃宇
-
控制系統
+關注
關注
41文章
6768瀏覽量
111897 -
汽車電子
+關注
關注
3036文章
8274瀏覽量
169764 -
物聯網
+關注
關注
2928文章
46030瀏覽量
389663 -
CAN接口
+關注
關注
3文章
80瀏覽量
26323
發布評論請先 登錄
基于DSP的高低速CAN總線汽車控制系統設計
【Tisan物聯網申請】物聯網跑步機控制系統
【Tisan物聯網申請】基于物聯網小車控制系統
汽車電子控制系統上的CAN總線通訊介紹





 工商網監
工商網監
評論