 機器人減速機結構圖及其作用詳解
機器人減速機結構圖及其作用詳解
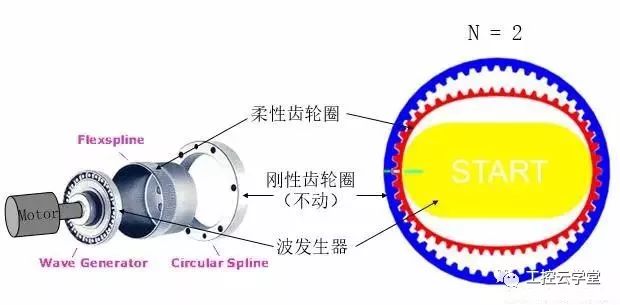
諧波減速器
馬達軸連接波發生器,機械手臂連接柔性齒輪圈的硬底座
柔性齒輪圈比剛性齒輪圈少N個齒輪位
波發生器轉一圈,柔性齒輪圈移動N個齒輪位
可以達到很高的減速比
RV減速器
RV減速器結構
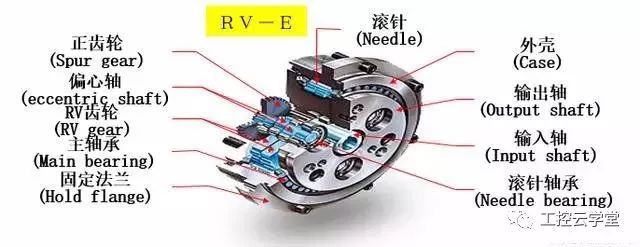
RV-E是兩級減速齒輪,第一級減速是輸入齒輪和正齒輪的外嚙合,三個正齒輪(spur gear)以120°的間隔對稱于輸出軸。
第二級減速透過正齒輪驅動偏心軸,帶動安裝在偏心軸上的RV齒輪,引起兩個RV齒輪的偏心運動。兩個RV齒輪以180°的相位差帶動輸出軸,以提供平衡載荷。
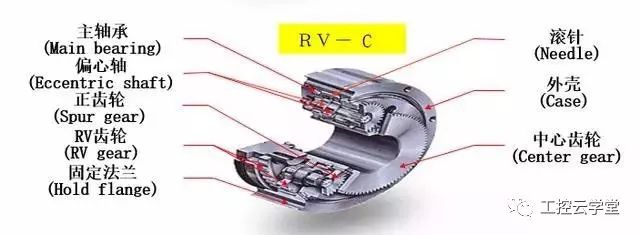
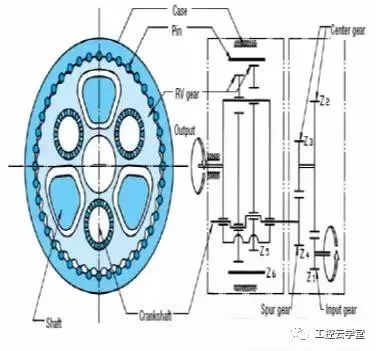
RV-C是兩級減速齒輪,第一級減速是輸入齒輪和第一中心齒輪的外嚙合,然后第二中心齒輪與正齒輪的外嚙合。三個正齒輪以120°的間隔對稱于輸出軸。
第二級減速透過正齒輪驅動偏心軸,帶動安裝在偏心軸上的RV齒輪,引起兩個RV齒輪的偏心運動。兩個RV齒輪以180°的相位差帶動輸出軸,以提供平衡載荷。
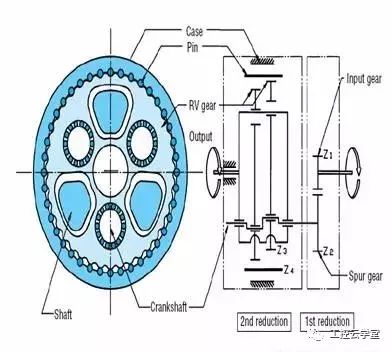
RV的減速原理

在外殼的內環圈內裝有圓柱形的滾針,RV齒輪的偏心運動引起滾針與擺線形RV輪齒的嚙合和脫離,產生多組RV輪齒與滾針同時嚙合,提高負載能力。 由于RV齒數比滾針少1個數目,因此當偏心軸旋轉一周時,如果固定外殼 (case),則RV齒輪與輸入軸同向轉1個齒的角度。
輸出端可以是傳動軸(shaft)或外殼(case)。如果外殼固定,則傳動軸為輸出,輸出為同方向。如果傳動軸固定,外殼為輸出,輸出的方向恰好相反。更換固定和輸出部件,可以得到不同的傳動比。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29533瀏覽量
211736 -
減速機
+關注
關注
2文章
603瀏覽量
24682
原文標題:機器人“心臟”減速機機構分析
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
工業機器人的產業鏈
工業機器人的產業鏈分為上游核心零部件,中游本體和傳感器等生產,以及下游的系統集成等。核心零部件是減速機、伺服系統、控制系統三部分,分別對應執行系統、驅動系統、控制系統,分別占成本的35%、25
發表于 08-23 15:10
桁架機器人核心配件介紹
分別是DeltaTau的PMAC卡和Beckhoff的TwinCAT系統。2、減速機為什么桁架機器人需要減速器呢桁架機器人通常執行重復的動作,以完成相同的工序;為保證在生產中能夠可靠地
發表于 11-22 12:08
為什么工業機器人還需要減速器呢
工業機器人第一關節到第四關節全部使用RV減速機,輕載工業機器人第五關節和第六關節有可能使用諧波減速機。重載工業機器人所有關節都需要使用RV
發表于 09-03 07:10
機器人的關節:盤點那些成名已久的減速機巨擘
作為機器人傳動核心部件之一的RV減速機在機器人制造中的成本最高,其重要性不言而喻。精密減速機國產化已經迫在眉睫,是未來機器人發展戰略中的大課
發表于 12-27 11:36
?2238次閱讀
RV減速機的機械原理對工業機器人的重要性和發展情況
工業機器人所有核心零部件中,減速機最為關鍵。
當我們在無限憧憬工業機器人時代的時候,你可曾知道,工業機器人最關鍵的機械結構之一RV
桁架機器人之減速機介紹
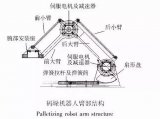
技術。桁架機器人的關鍵基礎部件,包括:構成機械手傳動系統、控制系統和人機交互系統,對桁架機器人性能起到關鍵影響作用,并具有通用性和模塊化的部件單元。主要分成以下三部分:減速機、交直流伺
發表于 10-23 15:05
?769次閱讀
在工業機器人帶動下 我國機器人減速機行業有望迎來快速發展
減速機是我國基礎裝備行業之一,下游應用包括起重運輸、水泥建材、重型礦山、航空航用、機器人等。由于下游市場給力,特別是機器人產業蓬勃發展,減速機行業未來發展前景持續向好。
發表于 11-05 10:53
?1224次閱讀
如何利用減速器替代電機轉速控制機器人運動
從上面的機器人臂部結構圖中我們可以看到,在機器人關節處都安裝有電機和減速機用來控制關節運動,那么問題來了:在機器人系統中,為什么不能直接控制
工業機器人常見減速機類型有哪些?現狀是什么?我國為何發展緩慢
在工業機器人中,減速機三大重要構件之一,成本可占到機器人總成本的三分之一。目前能滿足工業機器人減速機要求的只有精密諧波
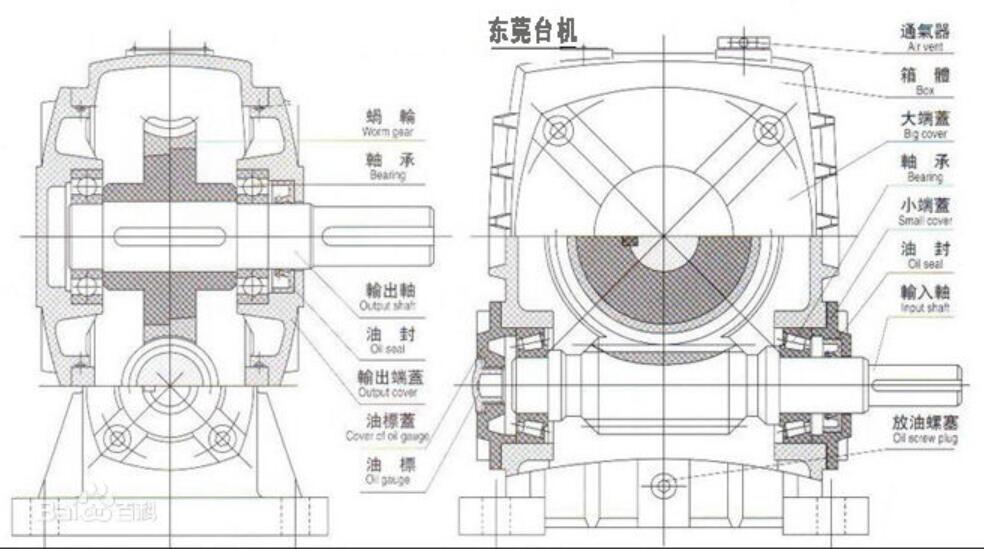
減速機的原理與結構是什么?
減速機是一種重要的機械裝置。如果您對工業機械有任何了解,那么您一定聽過這個詞。它作為一種傳動裝置,在很多工業應用中扮演了重要的角色。但對于非專業人士來說,減速機的工作原理及其結構是很難

減速機的結構及其工作原理
的結晶,對人類工業和自動化進程作出了不可磨滅的貢獻。變速箱是工業機器人的主要部件,也起著非常重要的作用。減速機的結構及其工作原理?在機械傳動





 工商網監
工商網監
評論