 介紹一下ARCore的基本概念并剖析其工作機理
介紹一下ARCore的基本概念并剖析其工作機理

摘要:我們在此之前詳細分析了ARKit的開發原理。本篇我們將深入淺出講一講另一個在直播場景下同樣實用的工具ARCore。
其實關注 ARCore也蠻久了,但一直沒有騰出時間來寫個總結。正好應朋友之約,我們今天就來好好聊一聊 ARCore.
ARCore的歷史以及與蘋果ARKit的競爭我就不多講了,在網上可以搜到一堆信息。但網上深入講解ARCore的確實不多。
本文主要有兩個目的,一是向大家介紹一下ARCore的基本概念,了解這些概念對于大家后續深入的學習 ARCore具有關鍵的作用。二是深入剖析一下 ARCore的工作機理,這樣可以讓大家更容易理解 ARCore。
另外,ARCore與ARKit的基本概念很接近,只要了解了其中的一個,基本上也就掌握了另一個。
ARCore的基本概念
ARCore工作時要做兩件事兒,首先跟蹤手機的運動軌跡,然后構建出它對現實世界的理解。
ARCore的運動跟蹤技術是通過 Camera 標識出特征點,并隨著時間的推移跟蹤這些特征點是如何移動的。通過這些特征點的運動數據及從手機慣性傳感器讀到的信息,ARCore計算出手機移動的位置和方向,并稱其為姿態。
除了識別出這些特征點外,ARCore還能檢測出像地板、桌面等平面信息以及在某個地方的光線強度。這些信息使得ARCore能夠構建出自己理解的真實世界。構建出這樣一個模型后,可以在上面放置一些虛擬內容了。
ARCore是如何做到的呢?它使用三項關鍵技術將虛擬內容與真實世界整合到一起,這三種技術分別是:
運動跟蹤
環境理解
光線評估
運動跟蹤
ARCore 可以在手機移動的過程中知道,相對于真實世界手機所在的位置和方向(姿勢)。
當手機在真實世界移動時,ARCore使用稱為并發測距和映射的過程來了解手機與周圍世界的相對位置。
ARCore能檢測到Camera捕獲的圖像在視覺上的不同特征,稱為特征點。它使用這些點計算其位置變化。隨著時間的推移,通過視覺信息與來自IMU設備的慣性測量,ARCore就可以估算出Camera相對于真實世界的姿態(位置和方向)。
通過將渲染的3D虛擬內容與物理Camera的姿勢對齊,開發人員就可以從正確的角度渲染虛擬內容。 再通過將虛擬物品的圖像渲染到從Camera獲得的圖像之上,這樣看起來就好像虛擬內容是真實世界的一部分似的。
環境理解
ARCore可以讓手機檢測出一塊水平面的位置和大小。如地面、桌子、書架等等。這樣就可以將虛擬物體放置到檢測出的水平面上了。
它是如何做到的呢?ARCore通過檢測特征點和平面不斷改善對現實世界環境的理解。
ARCore會查找常見水平表面(如桌面)上的特征點集群,除此之外,ARCore還可以確定每個平面的邊界,并將以上信息提供給您的應用程序。 這樣,開發人員就可以使用這些信息,并將虛擬物體放置在平坦的表面上了。
由于ARCore使用特征點檢測平面,因此可能無法正確檢測到沒有紋理的平坦表面(如白色桌面)。
光線評估
用戶交互
ARCore使用 hit testing(命中測試) 獲取與手機屏幕相對應的(x,y)坐標(如通過點擊屏幕等交互方式),將其投射到 Camera 的3D坐標系中,并返回與命中點射線相交的所有平面和特征點,以及在世界坐標系中該交叉點的姿態。這樣就能實現用戶與ARCore環境中的對象交互了。
錨點與跟蹤
ARCore可以改變對自身位置和環境的理解來調整姿態。如我們要在ARCore環境中放置一個虛擬對象,首先要確定一個錨點,以確保ARCore能隨著時間的推移不斷跟蹤對象的位置。通常情況下,會根據命中測試返回的姿勢創建一個錨點。
姿勢改變這項技術特別關鍵,只有得到姿勢,ARCore才可以隨著時間的推移不斷更新環境對象(像飛機和特征點)的位置。ARCore將平面和點認為是可跟蹤的特殊類型的對象。您可以將虛擬對象錨定到這些可追蹤的對象上,以確保在設備移動時,虛擬對象和可跟蹤對象之間保持穩定的關系。這就好像您在桌面上放置一個虛擬的花瓶,如果ARCore稍后調整與桌面相關的姿勢,那么花瓶仍然會保持在桌面上。
ARCore 核心類介紹
Session
com.google.ar.core.Session類,Session管理AR系統狀態并處理Session生命周期。 該類是ARCore API的主要入口點。 該類允許用戶創建Session,配置Session,啟動/停止Session,最重要的是接收視頻幀,以允許訪問Camera圖像和設備姿勢。
Config
com.google.ar.core.Config類,用于保存Session的設置。
Frame
com.google.ar.core.Frame類,該類通過調用update()方法,獲取狀態信息并更新AR系統。
HitResult
com.google.ar.core.HitResult類,該類定義了命中點射線與估算的真實幾何世界之間的交集。
Point
com.google.ar.core.Point類,它代表ARCore正在跟蹤的空間點。 它是創建錨點(調用createAnchor方法)時,或者進行命中檢測(調用hitTest方法)時,返回的結果。
PointCloud
com.google.ar.core.PointCloud類,它包含一組觀察到的3D點和信心值。
Plane
com.google.ar.core.Plane類,描述了現實世界平面表面的最新信息。
Anchor
com.google.ar.core.Anchor類,描述了現實世界中的固定位置和方向。 為了保持物理空間的固定位置,這個位置的數字描述信息將隨著ARCore對空間的理解的不斷改進而更新。
Pose
com.google.ar.core.Pose類, 姿勢表示從一個坐標空間到另一個坐標空間位置不變的轉換。 在所有的ARCore API里,姿勢總是描述從對象本地坐標空間到世界坐標空間的轉換。
隨著ARCore對環境的了解不斷變化,它將調整坐標系模式以便與真實世界保持一致。 這時,Camera和錨點的位置(坐標)可能會發生明顯的變化,以便它們所代表的物體處理恰當的位置。
這意味著,每一幀圖像都應被認為是在一個完全獨立的世界坐標空間中。錨點和Camera的坐標不應該在渲染幀之外的地方使用,如果需考慮到某個位置超出單個渲染框架的范圍,則應該創建一個錨點或者應該使用相對于附近現有錨點的位置。
ImageMetadata
com.google.ar.core.ImageMetadata類,提供了對Camera圖像捕捉結果的元數據的訪問。
LightEstimate
com.google.ar.core.LightEstimate保存關于真實場景光照的估計信息。 通過 getLightEstimate()得到。
實例分析
Google發布的 ARCore SDK 中包括了一些例子程序,有了上面的基本知識后,我們就很容易理解他所寫的 Demo 程序的流程了。
創建 Session 和 Conig
在 Activity中的 onCreate 方法中創建 Session 和 Config是個不錯的地方。
mSession = new Session(/*context=*/this);mDefaultConfig = Config.createDefaultConfig();if (!mSession.isSupported(mDefaultConfig)) { Toast.makeText(this, "This device does not support AR", Toast.LENGTH_LONG).show(); finish(); return;}
Session: 是ARCore的管理類,它非常重要。ARCore的打開,關閉,視頻幀的獲取等都是通過它來管理的。
Config:存放一些配置信息,如平面的查找模式,光照模式等信息都是記錄在該類中。目前該類還比較簡單,里邊沒存多少東西。
isSupported:該方法主要是對 SDK的版本及機型做控制。目前官方只支持幾款Google和三星的機子做測試。其它機型還都不支持ARCore,當然有一些機型通過破解后的SDK是可以使用 ARCore的。該方法中的 Config 參數沒有用到。
創建 GLSurfaceView 用于AR展示
在 Google 提供的Demo中,AR的展示部分使用的是 GLSurfaceView。做視頻開發的同學都清楚,Android 可以使用三種View進行視頻渲染。分別是:
SurfaceView
GLSurfaceView
TextureView
其中,SurfaceView最靈活,效率也最高,但使用起來比較煩鎖。而GLSurfaceView相對 SurfaceView就是簡單很多,只需要實現它的 Render 接口即可。而 TextureView使用最簡單,很多工作都由 Android 的窗口管理器幫你做了,但靈活性相對較差。
為了渲染的高效,Google在Demo中大量使用了OpenGL技術。由于OpenGL是圖像處理非常大的一個領域,無法通過一兩篇文章講解清楚,同時也不是我們本文的重點,所以我們這里不對它做詳細介紹,有興趣的同學可以到網上自行學習。
mSurfaceView = (GLSurfaceView) findViewById(R.id.surfaceview);...mSurfaceView.setPreserveEGLContextOnPause(true);mSurfaceView.setEGLContextClientVersion(2);mSurfaceView.setEGLConfigChooser(8, 8, 8, 8, 16, 0); // Alpha used for plane blending.mSurfaceView.setRenderer(this); mSurfaceView.setRenderMode(GLSurfaceView.RENDERMODE_CONTINUOUSLY);
該段代碼首先通過資源文件創建一個GLSurfaceView對象,然后將 GLSurfaceView 與 EGL 上下文關聯。并將Activity作為GLSurfaceView的回調對象(也就是說該Activity要實現 GLSurfaceView.Renderer中定義的接口,如onSurfaceCreated、onSurfaceChanged、onDrawFrame等),最后設置 mSurfaceView 的渲染模式為 GLSurfaceView.RENDERMODE_CONTINUOUSLY,即對 GLSurfaceView 持續不斷的渲染。
創建各種線程
要理解本節內容,首先大家要知道AR的詳細工作原理是怎樣的。我在這里再向大家做個簡要的說明。
背景展示
用過AR的人都知道,AR是將一些虛擬物品放到真實的場景中。那么這個真實的場景從哪里來呢?當然是從手機的 Camera上獲取。
我們把從 Camera中獲取的視頻當作 AR的背景。其實,AR 就是將虛擬物品放到視頻上,只不過不是簡單的放置,而是需要經過大量的計算,找到視頻中的平面位置再放置。
而Android中視頻的采集相對比較簡單,像直播系統,照像機都要使用該技術。
平臺檢測
上面我們已經說了,AR就是實時視頻+虛擬物品。但虛擬物不能簡單的放到視頻上,而是先對視頻中的每一幀進行檢測,找到視頻中的平面,確定好位置后,再將虛擬物品放置上去。這樣才算是AR呀:)
點云
上面我們知道了,AR=實時視頻+平面+虛擬物品。除此之外,它還應該能對虛擬物品進行跟蹤,也就是可以在不同的角度觀察同一個物品,并得出不同的姿態,所以就有了“點云” 技術。那什么是點云呢?顧名思義,形象的說就是一堆點,這些的形狀有點像云。點云中的每個點都是一個特征點,它是通過Camera獲得的。
放置虛擬物品
找到了平面,有了跟蹤手段,我們就可以將準備好的虛擬物品放置到平臺上,現在才是真正的AR哈。
好,知道了這些基本原理后,我們來看看Google Demo是如何做的呢?
創建線程
對于上面的每一點,Demo都啟動了一個線程,代碼如下:
...// Create the texture and pass it to ARCore session to be filled during update().mBackgroundRenderer.createOnGlThread(/*context=*/this);mSession.setCameraTextureName(mBackgroundRenderer.getTextureId());// Prepare the other rendering objects.try { mVirtualObject.createOnGlThread(/*context=*/this, "andy.obj", "andy.png"); mVirtualObject.setMaterialProperties(0.0f, 3.5f, 1.0f, 6.0f); ...} catch (IOException e) { Log.e(TAG, "Failed to read obj file");}try { mPlaneRenderer.createOnGlThread(/*context=*/this, "trigrid.png");} catch (IOException e) { Log.e(TAG, "Failed to read plane texture");}mPointCloud.createOnGlThread(/*context=*/this);...
上面的代碼中首先創建了一個背景線程,用來將從Camera中獲取的視頻渲染到屏幕上當背景。數據是從哪里來的呢?就是通過 Session.update 獲取 Camera 數據,再通過紋理交給背景線程。
對紋理沒有概念的同學可以把它想像成一塊內存空間。
然后啟動虛擬物品線程,用于繪制虛擬物品,及發生角度變化時,更新虛擬物別的姿勢。緊接著創建平面線程來繪制平面。最后啟動點云線程繪制特征點。
到此,各種線程就創建完畢了。下面我們來說一下如何渲染。
命中檢測與渲染
命中檢測
當我們要向背景繪制虛擬物品時,首先要進行命中檢測。代碼如下:
MotionEvent tap = mQueuedSingleTaps.poll();if (tap != null && frame.getTrackingState() == TrackingState.TRACKING) { for (HitResult hit : frame.hitTest(tap)) { // Check if any plane was hit, and if it was hit inside the plane polygon. if (hit instanceof PlaneHitResult && ((PlaneHitResult) hit).isHitInPolygon()) { // Cap the number of objects created. This avoids overloading both the // rendering system and ARCore. if (mTouches.size() >= 16) { mSession.removeAnchors(Arrays.asList(mTouches.get(0).getAnchor())); mTouches.remove(0); } // Adding an Anchor tells ARCore that it should track this position in // space. This anchor will be used in PlaneAttachment to place the 3d model // in the correct position relative both to the world and to the plane. mTouches.add(new PlaneAttachment( ((PlaneHitResult) hit).getPlane(), mSession.addAnchor(hit.getHitPose()))); // Hits are sorted by depth. Consider only closest hit on a plane. break; } }}
在例子中,它查看是否有點擊事件,且圖像處理于跟蹤狀態?如果是,就對其進行命中檢測,看是否可以找到一個平面,如果找到就創建一個錨點并將其與該平臺綁定起來。
渲染背景
// Draw background.mBackgroundRenderer.draw(frame);
通過上面的代碼就可以將紋理中的內容推給 EGL,上面創建的渲染線程從 EGL 上下文中獲取數據,最終將視頻渲染到屏幕上。
繪制點云
mPointCloud.update(frame.getPointCloud());mPointCloud.draw(frame.getPointCloudPose(), viewmtx, projmtx);
同理,通過上面的代碼,就可以將數據傳給點云線程進行點云的繪制。
繪制平面
// Visualize planes.mPlaneRenderer.drawPlanes(mSession.getAllPlanes(), frame.getPose(), projmtx);
通過上面代碼將數據傳給平面線程進行平面的繪制。
繪制虛擬物品
for (PlaneAttachment planeAttachment : mTouches) { if (!planeAttachment.isTracking()) { continue; } // Get the current combined pose of an Anchor and Plane in world space. The Anchor // and Plane poses are updated during calls to session.update() as ARCore refines // its estimate of the world. planeAttachment.getPose().toMatrix(mAnchorMatrix, 0); // Update and draw the model and its shadow. mVirtualObject.updateModelMatrix(mAnchorMatrix, scaleFactor); mVirtualObjectShadow.updateModelMatrix(mAnchorMatrix, scaleFactor);}
最后,遍歷所有的錨點,在每個錨點上繪制虛擬物品。
至此,我們對ARCore的分析就告一段落了。
小結
ARCore相對于初學者來說還是有不少難度的。因為里面有很多新概念需要大家消化吸收。
另一方面,ARCore目前只有幾款機型可能做測試,而這幾款機型在國內用的人不多,所以對于大多數人來說沒法做實驗,這也增加了學習的難度。
除了以上兩點外,ARCore中大量使用了 OpenGL的相關知識。而OpenGL又是一門很深的學問,所以學習的難度更加陡峭了。
通過以上三點,可以說目前學習ARCore的門檻相較于蘋果的ARKit要難不少。
-
Ar
+關注
關注
25文章
5149瀏覽量
172362 -
Camera
+關注
關注
0文章
81瀏覽量
21479
原文標題:深入淺出,ARCore開發原理
文章出處:【微信號:shengwang-agora,微信公眾號:聲網Agora】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
天線分集技術的基本概念介紹
智能天線的基本概念
認識一下針對單片機幾個基本概念
講解一下A/D和 D/A的基本概念
探討一下PWM基本概念與簡單基礎的應用

放大器的基本概念

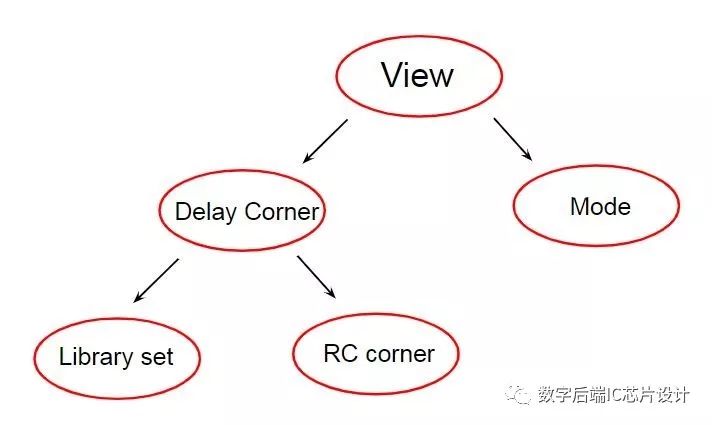
介紹時序分析基本概念MMMC
時序分析基本概念介紹—花一樣的“模式”
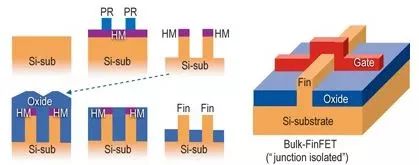
數字后端基本概念介紹—FinFET Grid





 工商網監
工商網監
評論