 機器人的靈活性可能會在商業和日常生活中產生更大的影響
機器人的靈活性可能會在商業和日常生活中產生更大的影響
無人機和無人駕駛汽車的新聞往往占據媒體的頭條,但另一個突破-機器人的靈活性-可能會在商業和日常生活中產生更大的影響。
美國東北大學Helping Hands機器人實驗室主任、計算機科學教授Robert Platt認為,“機器人操作是另一只掉下的鞋子。想象一下,一個機器人可以在現實世界中用手去做事情:從拆炸彈到洗衣服。數十年來這一直是研究界的夢想,現在終于即將變成現實。”
Platt表示,機器學習、大數據和機器人感知方面的最新進展使我們處于機器人在不受控制的環境中執行精細動作任務和功能的能力出現飛躍的門檻。
機器人可以在高度結構化的工廠環境中進行重復性的任務,也可以在現實世界中進行有意義的工作。
為什么精細動作技能已經落后
機器人和人工智能領域有個非常諷刺的事實,Moravek悖論:對于人來說很難的事情,對于機器人來說相對容易,而對于人類來說很容易的事情,在機器人那里幾乎是不可能完成的任務。
我們可以用機器人的計算能力來打敗一個國際象棋冠軍,但卻無法讓它像2歲大的孩子那樣靈活。在隨機堆放的辦公用品中識別和抓取鉛筆對于機器人來說幾乎是不可能的,如最近一次DARPA國際機器人挑戰賽所展示的那樣,打開一扇門走進一個房間,看起來就像一個打鬧的喜劇場景。
數百萬年以來,人來一直在進化他們的視覺、感覺和運動技能,這些復雜的技能深深植根于人類的腦電路中,以至于我們毫無意識地就去執行了。相比之下,數學、科學和股票分析等高層次的嘗試是相對較近的人類努力,因此,這些工程師們更容易復制。
蓄勢待發
盡管面臨巨大的挑戰,Platt認為,自主機器人依然能夠在操縱陌生物體的能力上取得巨大的飛躍。
例如,Platt和Helping Hands實驗室的團隊已經訓練了一個機器人從一堆混亂的物體中尋找、抓取并移除不熟悉的物體,精度高達93%。實現這一點需要在機器學習、感知和控制方面取得重大進展。
研究人員使用了一種叫做強化學習的技術,機器人通過反復試驗學習。他們創造了一個模擬世界,機器人可以在虛擬現實中練習拾取和操縱物體。當機器人做了研究人員想要的東西,比如從一個堆物體中抓起某個物體,它將得獎勵。這種技術允許機器人在虛擬環境中掌握技能,然后將其應用于現實世界。
機器人在不受控制的環境中工作也是深度認知的重大進步。以前,他們只能把世界看作是一個由各種顏色隨機組成的平面。但是,通過這種新的三維感知,他們可以在擁擠的地方識別出不同的物體。
視覺是指導廣泛運動的極好工具,精細動作技能需要觸覺。
Platt解釋道,“想想你帶著手套可以做什么。你可以打開車庫門,抓起鏟子,清理車道。但是如果你需要先打開車庫,脫下手套,然后插鑰匙。”
作為NASA資助的一部分,Platt的實驗室最近建立了一個裝備有觸覺傳感器的機器人手,并開發了用于解釋觸覺數據的新算法。
Platt表示,“為了將鑰匙插入鎖中,機器人需要確切地知道如何控制鑰匙,精確到毫米。我們的算法可以非常準確地定位這些被放棄的物體。”
Platt的實驗室通過讓機器人抓住USB連接器并將其插入端口來演示這些新功能。雖然這聽起來不是什么大不了的事情,但是這對于制造那些可以執行精確操作任務的機器人來說是關鍵的一步,例如更換手機中的電池。
未來怎么樣?
正如雷達、電話、互聯網等先進技術剛剛興起的時候,機器人靈活性的實際應用還很難預測,以下是其中一小部分:
家庭
Platt的Helping Hands實驗室與馬薩諸塞大學洛威爾分校和新罕布什爾州的Crotched Mountain Rehabilitation Facility合作,正在打造一款帶機器人手臂的動力輪椅,該機器人手臂可以抓住房子周圍的物品或完成簡單的家務。這可以使老年人或殘疾人繼續在自己的家中獨立生活。
Platt也有興趣在日常生活中使用這項技術,他表示,“我們聽說很多關于Alexa風格的助理可以通過訪問互聯網來回答問題,但是這些助理不能做任何事情。我們希望為這些設備配備一個機器人機身,這樣你就可以說,'Alexa,拿報紙給我','Alexa,清理一下Jimmy的房間'。”
戶外
工程學教授Hanumant Singh與Platt合作,正在打造一個高爾夫車大小的移動機器人,它有一個機器人手臂,可以在東北大學的校園里自主駕駛,也能完成一些簡單的任務,比如丟垃圾。
軍用
類似類型的機器人可以在激烈沖突的地區承擔類似的職責,并用于危險的行動,比如拆彈。例如,普拉特和他的團隊最近完成了海軍研究辦公室資助的一個項目,用于開發將在海軍艦艇上使用的基本操縱技術。
危險廢物處理
工程學教授Taskin Padir和他的團隊獲得了能源部的項目資助,用于調整NASA的Valkyrie機器人處理危險廢物。冷戰時期,美國有十幾處散落著放射性廢物的地方。自主機器人要對這些廢物進行定位、抓取,并將他們放置到安全容器中,他們就需要驚喜運動技巧和在陌生的環境中操作的能力。
醫學
由美國國家科學基金會資助,工程學教授Peter Whitney正在與斯坦福大學的研究人員合作,打造一個可以進行MRI引導手術的機器人。
太空探索
Platt正在與美國航空航天局的研究人員合作開發機器人操縱能力,以處理未來美國宇航局太空任務中的軟物體。
Platt表示,“在實驗室中完美工作的機器人,當他們處于陌生的環境中時,很快就會崩潰。我們的目標是開發底層算法,使他們在現實世界中更可靠。 最終,這將從根本上改變我們對機器人的思考方式,使他們成為與人類的合作伙伴,而不僅僅是在遙遠的工廠工作的機器。”
-
機器人
+關注
關注
213文章
29563瀏覽量
211927 -
機器學習
+關注
關注
66文章
8496瀏覽量
134218 -
大數據
+關注
關注
64文章
8953瀏覽量
139671
原文標題:機器人技術的下一個重大突破
文章出處:【微信號:jingzhenglizixun,微信公眾號:機器人博覽】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
從科幻到日常生活: 服務機器人成為第 137 屆廣交會的焦點
舵機:機器人領域的“關節革命者”
EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用

“兩會”熱議“機器人和飛行汽車”,核心動力電機可能會火
工業機器人工作站的建設意義
天創機器人發布全球首款防爆人形機器人“天魁1號”
焊接機器人六個軸分別是什么作用

面對快速迭代的技術,怎能忽視設備升級的高效與靈活性?

工業機器人常用的編程方式
機器視覺 歡創播報 Figure 02人形機器人發布
日本推出革命性的人形機器人
機器人神經網絡系統的特點包括
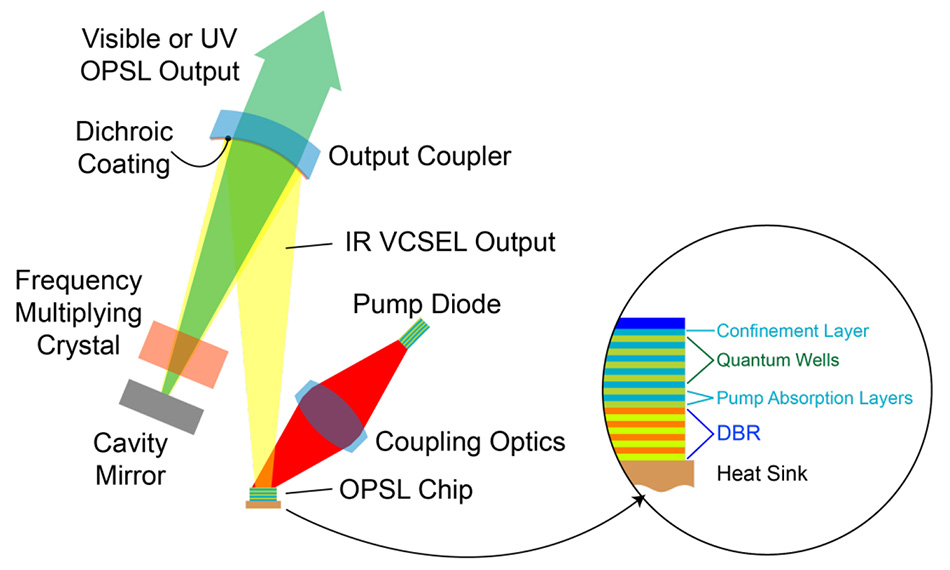
OPSL 優勢1:波長靈活性





 工商網監
工商網監
評論